








车东西(公众号:chedongxi)
文 | 晓寒
12月11日,据多家外媒报道,在近日召开的NIPS(Neural Information Processing Systems)大会上,苹果公司AI技术负责人Ruslan Salakhutdinov谈到了苹果公司在自动驾驶项目上的技术进展,并展示了几张技术DEMO图片。

(Ruslan Salakhutdinov)
不久前,苹果官方在一篇学术论文中讲述了其使用激光雷达3D点云数据的一些细节。
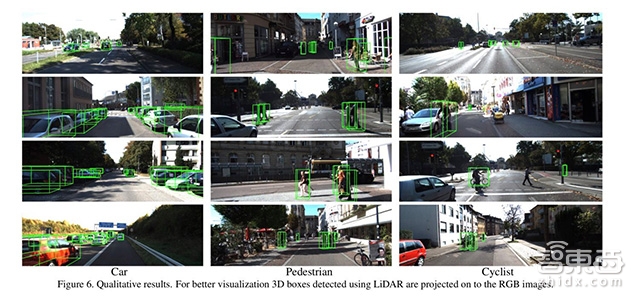
Ruslan Salakhutdinov在本次大会上再次提及了这项技术,即通过对激光雷达的点云数据和摄像头画面进行处理,来让无人车识别行人和骑行者。与此同时,他还向外界展示了苹果基于神经网络、机器学习等AI技术来处理摄像头拍摄画面的感知系统。
(苹果之前放出的DEMO图片)
这位技术负责人在现场放出了几张DEMO图片来展示其取得的进展。他还特别强调,这套感知系统在下雨以及被遮挡的情况下,依然能够识别并估算出行人的位置。
此外,Ruslan Salakhutdinov还提到苹果也在用vSLAM(Visual simultaneous location and mapping)技术来帮助无人车构建高精地图并实现自定位。
苹果在悄悄造车的传闻由来已久,不过该公司大约在2016年夏天将方向从造车转向与自动驾驶领域。今年4月,苹果获得加州自动驾驶测试牌照,开始“公开”进行自动驾驶技术的研发工作,苹果CEO库克在接受采访时更是称自动驾驶项目是AI之母。
今年10月份,美国自动驾驶初创Voyage联合创始人MacCallister Higgins放出一段视频,曝光了苹果自动驾驶测试车的3.0版本,从中可以清晰的看到苹果自动驾驶技术的传感器方案。

(苹果新自动驾驶车远景图)
视频画面显示,苹果在一辆雷克萨斯RX450h的车顶安置了白色支架,支架前后各包含了3组十字形排布的传感器阵列。

(文中左中右箭头所指分别为毫米波雷达,激光雷达、摄像头)
其中垂直方向是两枚Velodyne的16线激光雷达PUCK(也可能是32线的VLP 32C),水平方向为两枚毫米波雷达(清晰度不足以分辨具体型号),而垂直与水平的交叉中心则为一枚摄像头。总共六组传感器阵列分别面向左前、正前、右前、左后、正后、右后六个方向,形成环视的探测能力。

(传感器近景图)
另外,还有若隐若现的小圆盘,是GPS天线。
与老对手谷歌相比,苹果在自动驾驶方面的动作要慢上一些。
谷歌旗下自动驾驶子公司Waymo在上个月刚刚进行了不载安全员的公开测试,而Waymo的CEO Krafcik在本月更是宣布,未来几个月内将在美国凤凰城市的钱德勒地区公开进行不带安全员的载人运营测试。
事实上,苹果公司进行某项技术研发一直都比较隐秘,但在公开表明进入了自动驾驶领域后,其反倒开始活跃起来了,又是发论文又是公开演讲,而这些动作其实都说明苹果正在自动驾驶领域奋起直追。


