







智东西(公众号:zhidxcom)
编 | 韦世玮
导语:最近,NASA的JPL工程师们为Mars 2020探测器设计了一个新型机械臂,能够执行比以往火星探测器更为广泛和强大的功能。
智东西7月4日消息,据IEEE官网信息显示,近日,NASA喷气推进实验室(Jet Propulsion Laboratory,JPL)的工程师们为Mars 2020探测器安装了一个长2.1米的机械臂,该机械臂是目前火星探测器上功能最强大的机械臂。
Mars 2020的机械臂由科研人员历时5年研发,虽然与前一代好奇号(Curiosity)探测器整体相似,但Mars 2020的科研功能更为广泛和强大。一方面,它能将机械臂探入岩石中进行采样并储存;另一方面,它机械臂末端的钻头可更换多种工具,以执行不同功能的探测。
据悉,Mars 2020计划将于2020年7月发射,并在2021年2月18日登陆耶泽洛环形山(Jezero Crater)。
一、整体外观与“前辈”好奇号相似
JPL以研发机器人而闻名,这些机器人通常在极其遥远和恶劣的环境中,进行常人难以完成工作。
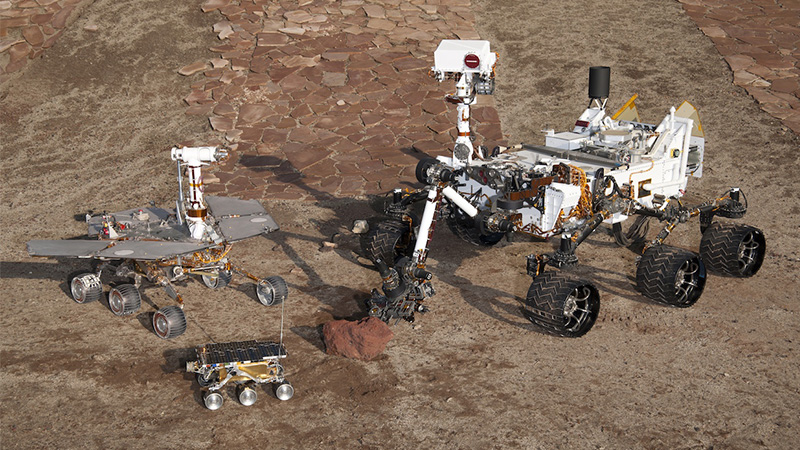
机遇号(Opportunity)在2004年登陆火星时,需要执行长达90天的任务。但火星上尘土飞扬和温度剧烈波动的环境对机器人来说很不友好,即使是机器人最基本的维护或修理都是不可能完成的任务。
然而,机遇号却在火星上保持运行了5498天,其孪生兄弟勇气号(Spirit )运行了2269天。
Mars 2020的总体设计与火星科学实验室(MSL)的好奇号探测器相似。好奇号自2012年8月以来,一直在探索火星上的盖尔陨石坑(Gale Crater)。
▲好奇号
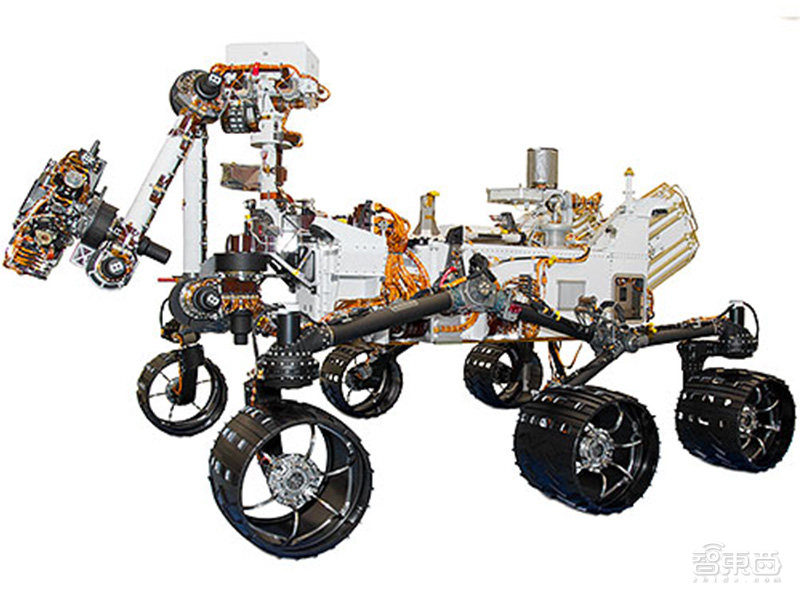
然而,Mars 2020的新机械臂已经被研究人员重新设计,将能够进行比好奇号更复杂的科学研究。例如,它能够钻进岩石中收集样本,以便研究人员回收。
体型上,Mars 2020比好奇号更大一些,并比好奇号重约150公斤。但在其他方面,Mars 2020和好奇号的尺寸大致相同。
此外,Mars 2020还使用了与好奇号相同的放射性同位素热电机进行供电。
值得一提的是,研究人员也给Mars 2020的车轮进行了升级,升级后的铝制车轮比好奇号的车轮更耐用,磨损程度更轻。
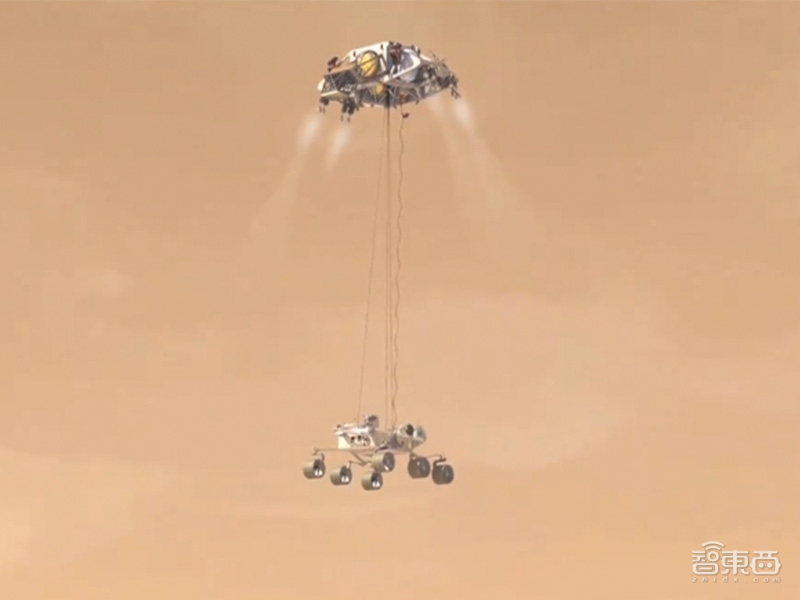
Mars 2020登陆火星的方式也与好奇号相同,它将像从直升机上垂吊下降的突击队一样,急速地降落到火星表面。
二、机械臂的钻头可进行多功能切换
对Mars 2020来说,真正进步的地方在于它强大的科研功能。
Mars 2020除了配备高度实验性自主直升机的基站之外,最有趣的新功能是它能够采集岩石和土壤的表面样本,把样本放入试管中密封,并将试管存储起来以备日后检索,或送回地球让研究人员进行分析。
Mars 2020使用机械臂末端的一个钻头进行样本采集工作,该机械臂配备了多种能够更换的钻头,还能容纳许多不同的工具。
这些工具包含了一组叫SHERLOC的矿物识别传感器套件、一个X射线分光仪以及一个叫PIXL的照相机,它们均可在钻头的平台上进行切换。
从根本上说,Mars 2020的大部分科研工作,都将依赖于它所携带的机械臂和硬件,其中包括近距离地表调查和收集样本进行缓存。
Mars 2020探测器的工程师之一Matt Robinson表示,Mars 2020的系统包括机械臂、机械臂末端的钻头,以及探测器主题内管理样本的样本缓存系统。
自2001年以来,Matt Robinson一直在JPL工作。他曾在凤凰号火星着陆器的设计任务中,担任机械臂飞行软件开发人员,以及机械臂测试和操作工程师。
此外,他还曾在好奇号项目中担任机械臂测试和操作首席工程师。
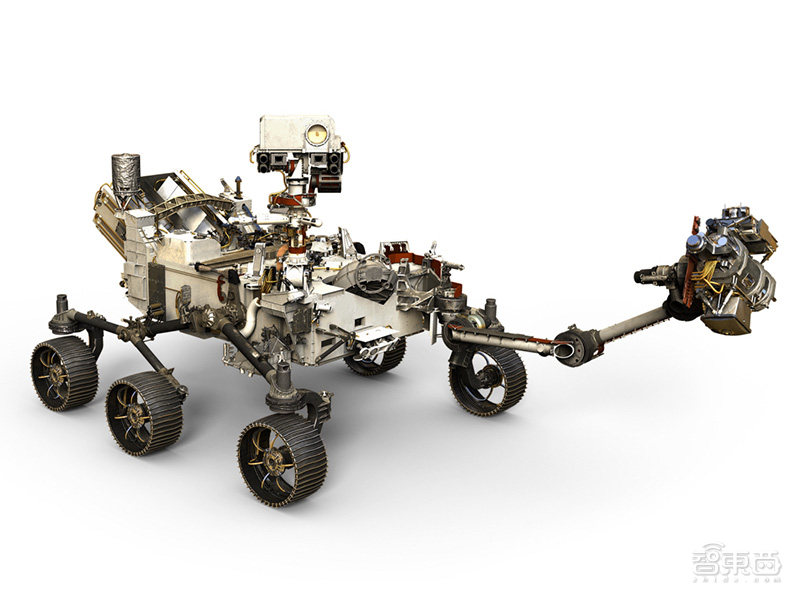
▲Mars 2020
三、对话Matt Robinson:详解Mars 2020机械臂特点
为了进一步了解Mars 2020机械臂的设计方式和特点,IEEE Spectrum特别对Matt Robinson进行了采访。
IEEE Spectrum:设计一个能够在火星上运行的探测器机械臂有什么不同?
Matt Robinson:我们花了5年多的时间对机械臂进行设计、制造、组装和测试。
同时,科学家们也要求该机械臂能够实现更多高级目标,其中包括采集核心样本并处理样本以备返回、随身携带科学仪器以帮助确认需取样的岩石……
作为工程师,我们需要对这些目标进行定义并给予支持。
为地球外的其他星球建造机械臂时,我们需要针对环境设计一些强大的功能,并能对机器的故障做出坚固的保护。
在火星上,一天中温度的变化幅度能达到100摄氏度,因此对我们来说,机械臂承受热量方面非常具有挑战性。
例如,力传感器通常不能在我们所谈论的温度范围内工作,因此,我们需要付出很多努力对探测器的力传感器进行设计和测试。
IEEE Spectrum:如何决定冗余的大小?
Matt Robinson:这主要由机器人的质量和体积决定,这两点通常是决定机器人冗余量的驱动因素。当我们将一定数额的质量分配给机械臂时,也会给机器人设定一个能适应该质量的体积。
另外,由于我们有着向其他星球发送机械臂的丰富经验,因此我们可以在项目开始时,就能为机械臂制定许多设计要求,让它更符合探测火星需具备要求。这也是我们决定冗余大小的一个方式。
IEEE Spectrum:这种对冗余的需求是否影响了机械臂的设计?
Matt Robinson:对机械臂的设计是由几个因素影响的。一方面,我们大概知道机械臂末端的器械会有多大,所以机械臂的设计部分是由器械影响的。随着器械越大,机械臂也必须越大。
另一方面,机械臂的末端有取芯钻,由于取芯需要一定的力量,因此机械臂必须足够强壮才能做到这一点。这些要求都影响了机械臂的设计。
除此之外,机械臂也必须在火星的环境中工作,因此我们也必须为机械臂设计能适应温度变化,以及热膨胀之类的功能。

IEEE Spectrum:如何有效地在地球上测试Mars 2020的机械臂?
Matt Robinson:这是一个好问题。它的机械臂是为了能够在地球和火星上工作而设计的,因此它足够强大。
我们有一个机械臂的刚度模型,它让我们能够补偿地球和火星在重力方面的差异。
为了测试,我们制作了两个机械臂模型,包括一个将要飞往火星的飞行模型,以及一个工程模型,这两个模型实际上是彼此的复制品。
其中,工程模型主要留在地球上,所以即便我们把飞行模型送往火星,我们也可以在地球上继续进行测试。
如果发生诸如钻头卡在火星表面上的意外,我们可以试着用我们的工程模型在地球上复制这些条件,并用它来测试不同的场景来克服这些问题。
IEEE Spectrum:机械臂拥有多大的自主性?
Matt Robinson:我们有不同的自治模式。一方面,我们有相当高级的飞行软件,例如,我们有一个只说“停靠”的命令,它可以进行所有的力量控制,移动机械臂与转盘传送带进行对接。
另一方面,在地面交互上,我们在流动站上安装了能够生成3D地形模型的立体摄像机。利用这些3D地形模型,科学家可以在地面上选择一个目标,然后我们可以将机械臂放在目标上。
科学家们喜欢选择特定的样本目标,因为那里有非常特殊的岩石类型,帮助他们寻找样本。
2020年,我们将为探测车提供下一级自主驾驶能力,以便它们到达一个区域后,至少能对该区域进行初步勘测,这样科学家们就可以选择特定的目标。
这样做的好处是,如果科学家们发现远处有一个感兴趣的区域,探测车就会自动开到那里,并展开机械臂拍摄所有的照片,以便我们可以生成这些区域的3D地形模型,然后科学家就能在第二天选择他们想要的特定目标。
文章来源:IEEE Spectrum
