







车东西(公众号:chedongxi)
文 | Bear
车东西7月12日,博世今日举办了精准定位方案专家分享会。会上,博世分享了该公司在高精度定位领域的VMPS卫星定位与道路特征定位两大解决方案,这两个解决方案互为冗余,可为L3级以上(L1、L2也可用)的自动驾驶汽车提供厘米级的高精度定位服务。
博世VMPS系统可通过全球导航卫星系统对车辆进行定位,并通过地面基站与数据处理中心进行定位纠偏,得到的精准定位信息通过卫星广播与云端蜂窝通信的方式实时传输到车辆,从而实现车道级定位,误差在0.5米以内。
而当车辆驶入隧道等卫星信号薄弱的地区,博世的道路特征定位服务就能够发生作用,通过使用博世第五代毫米波雷达与第三代摄像头,对车道线、限速牌等参考物进行识别,通过算法计算出自身的位置,误差在10-20厘米之间。
这两大技术将会在明年年中随着相应车型的面世投入量产,为博世的L2+自动驾驶解决方案提供高精度定位服务。
一、博世三条路径布局自动驾驶
分享会伊始,博世底盘控制系统中国区市场与发展战略总监丰浩介绍了博世在自动驾驶技术上的总体布局与落地情况。
他表示,目前博世在自动驾驶领域有三条发展路径,分别对应城市街道、高速公路与限定低速区域三大场景。
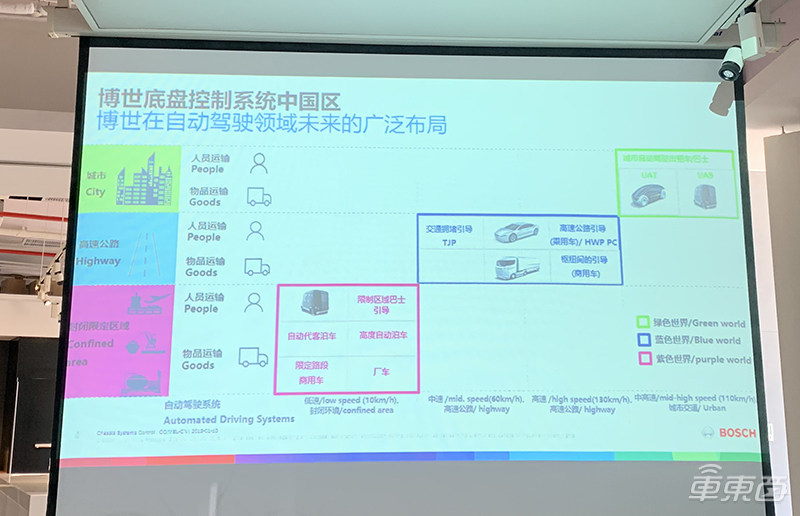
▲博世自动驾驶布局
对应不同等级的自动驾驶,博世也有着相应的布局。
在L1级ADAS领域,博世从2014年进入中国开始,就与吉利等主机厂达成了合作,进行ADAS系统在国内的普及,到目前为止,配置了博世ADAS系统的车型已经累计超过了100款。
而在L2级自动驾驶方面,博世也在今年与国内的众多车企展开合作,上车数超过40款。
目前博世已经在进行L3级自动驾驶系统的研发,这一等级的自动驾驶系统仍然会面向乘用车,预计会在2022年左右实现落地。虽然时间点靠后,但丰浩认为,这一落地时间是博世充分考虑了L3级自动驾驶汽车可能会面临的各种场景以及需要解决的问题之后提出的一个理性的时间点。
对于已经进入无人驾驶领域的L4级自动驾驶,博世一方面在与戴姆勒展开无人出租车的试运营,另一方面,则是在尝试AVP自动代客泊车等低速场景下的无人驾驶。
丰浩指出,博世最初对于自动驾驶汽车的研究在单车智能上比较深入,但近年来兴起的V2X概念让博世也深受启发,该公司的AVP自动代客泊车方案中就融入了场端传感器的应用,车主无需对现有L2级车辆传感器进行升级,即可享受到自动代客泊车服务。
除此之外,车路协同的概念还让博世对于更多自动驾驶场景有了思考。丰浩举例说道:“原先车辆行驶在高速公路上,需要在高精度地图上进行位置的确认,告诉车辆正在高速公路上行驶。但中国的高速公路是有收费站的,如果能利用进出收费站的情况来确认车辆的位置,就把复杂的高精度地图,变成了简单的路端确认’0’和’1’的问题。”
因此,他指出博世也在考虑进行更广泛的车路协同技术的研发。
在自动驾驶的底层技术上,丰浩向车东西在内的媒体介绍了博世的VMPS星基定位与道路特征定位两大解决方案,这两大解决方案利用了博世的车身传感器、卫星导航与惯性传感器三项技术对车辆进行有冗余的精准定位。
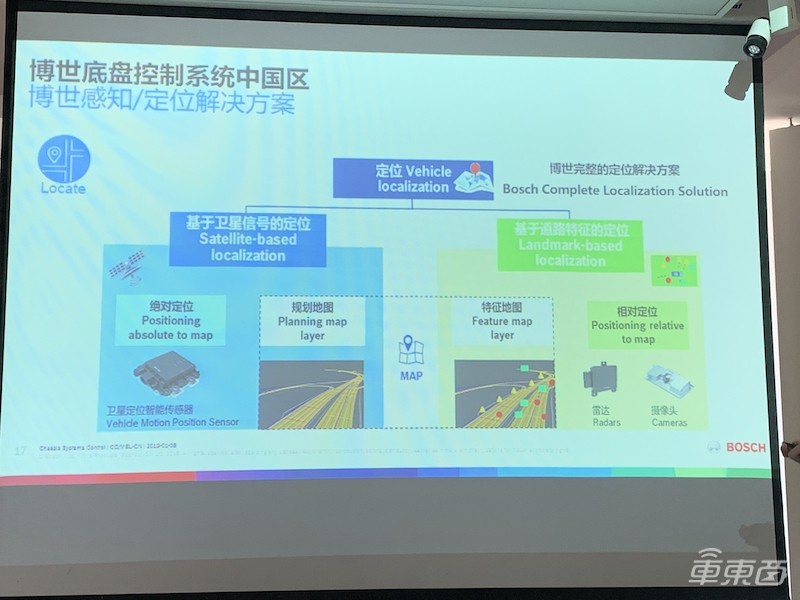
▲博世定位解决方案
不仅如此,车身传感器所感知到的道路特征信息将会上传到博世物联网云,并与现有的高精度地图的信息进行比对,从而实现了高精度地图的实时更新。
在这一层面上,博世对自动驾驶的底层进行了赋能,为博世未来进军高等级自动驾驶铺平了道路。
二、VMPS卫星定位 解决车辆信号不稳问题
博世的两大定位技术在各自的应用场景与功能上具备相互冗余、相互补足的属性。
博世卫星定位智能传感器的产品经理陈述向车东西在内的媒体介绍了这一技术的主要原理,即基于全球导航卫星信号和地球静止轨道卫星播发的纠偏服务信号,并融合高性能惯性测量单元,为自动驾驶车辆提供稳定且精准的定位结果。
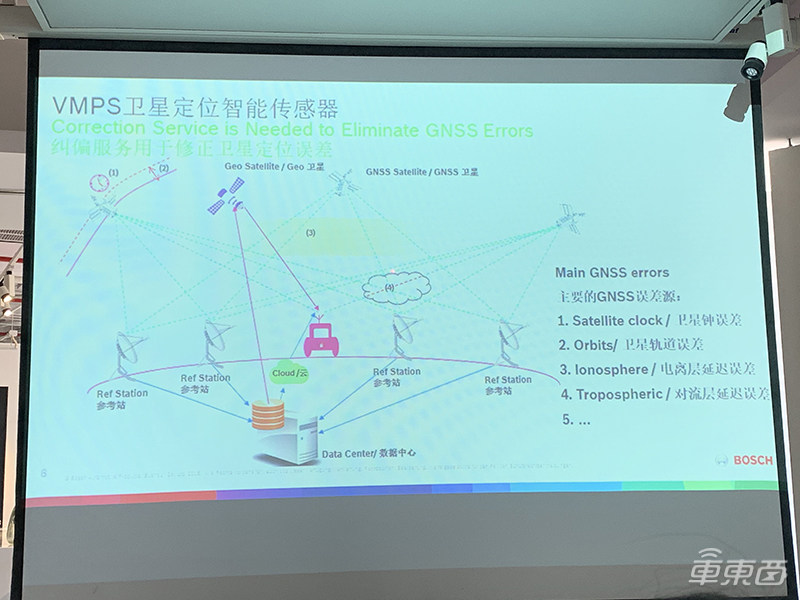
▲卫星导航定位纠偏服务
但由于全球导航卫星位于数万千米的高空之上,其中又有电离层、对流层对信号造成的延迟误差,因此不加处理的卫星导航定位的误差极大,无法满足自动驾驶汽车所需要的车道级定位。
博世将轨道卫星对车辆的定位信息,在地面基站、数据处理中心通过算法进行纠偏处理后返回卫星,通过卫星广播与云端的蜂窝数据向车辆广播纠偏后的定位信息。
而在车端,通过将卫星广播(或云端传输)的数据与车辆轮速传感器、转向传感器等信息进行结合,得出更精确的定位信息,这一定位误差通常可以控制在0.5米之内,满足车道级定位需求。
而当车辆驶入隧道等卫星信号薄弱的场景时,车辆的惯性传感器(IMU)依然可以根据车辆的速度与转向角度对车辆进行一段路程的定位。
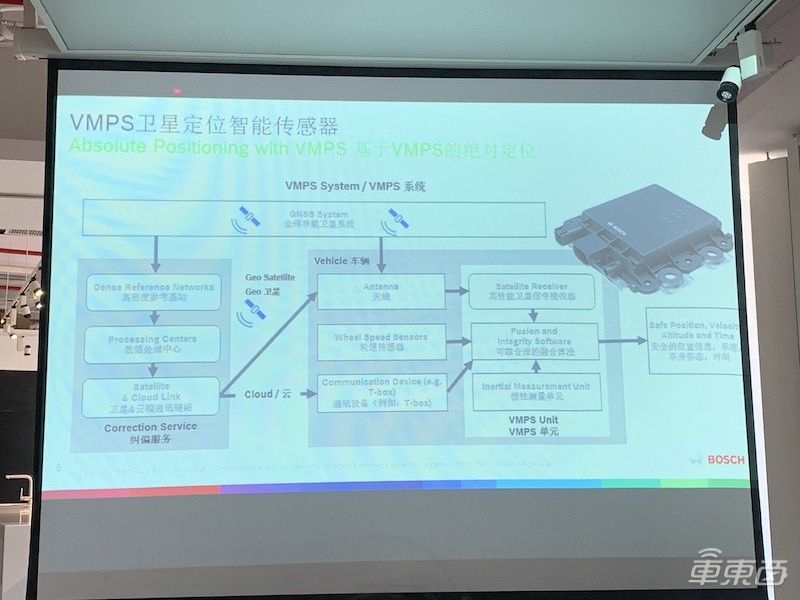
▲博世VMPS方案示意图
根据博世在苏州进行的测试,车辆驶入隧道300米后,使用惯性传感器进行的车辆定位依然可以保证误差在0.15米左右,不过随着行驶距离的增加,这一误差将会越来越大。
除此之外,陈述还表示,目前博世所采用的高精度定位解决方案与传统高精度地图供应商所采用的技术逻辑完全不同。
传统图商使用的是载波相位差分技术(即通过将基准站采集的载波相位发给用户接收机,进行求差解算坐标。Real Time Kinematic,以下简写“RTK”。),需要车辆主动向基站与数据中心请求位置信息,数据中心通过算法建立虚拟基站,并向车辆上的接收机提供虚拟基站对导航卫星的观测值与自身的坐标,从而实现车辆精准定位。这一过程非常依赖蜂窝网络,一旦信号不佳,定位很可能会出现极大偏差。
而博世使用的是SBAS星基增强系统,通过卫星与云端单方面向车辆进行广播,并借助基站与数据中心进行纠偏来实现精准定位。这一技术避免了双向通信,降低了网络时延对定位技术的影响。
三、道路特征识别解决隧道定位
上述的VMPS系统虽然能够利用卫星导航进行精准的定位,但其存在的短板也非常明显,即面对隧道等卫星信号弱的场景时,自动驾驶汽车的实时定位难以得到保障。虽然惯性传感器弥补了其中的一些不足,但也无法让自动驾驶汽车长时间在隧道中行驶。
在这一方面,博世推出了博世道路特征服务对其进行补足。通过识别道路上的标志物、车道线,与高精度地图进行比对,从而确定自身的位置。
博世技术专家刘玉磊表示,车辆的驾驶环境通常可以分为静态部分与动态部分,人眼能看见的物体,摄像头几乎都能够捕捉到。但很多时候,一些障碍物遮蔽了传感器的部分感知能力,因此,车辆会需要高精度地图这样的超视距传感器来弥补感知上的缺陷。

▲博世技术专家刘玉磊
博世的道路特征识别就集成在高精度地图之中,在这一方案中,博世主要依赖于其将在明年年中推出的第五代毫米波雷达与第三代摄像头来实现。
这两者互为冗余,摄像头会受到炫光、雨雪、大雾等极端环境的影响,而毫米波雷达几乎可以全天候运行,不过摄像头却可以呈现出实时的画面,为提供了视觉上的数据。
通过这一解决方案,博世解决了卫星定位信号微弱时,车辆的高精度定位问题,这一方案的误差在10-20厘米之间。
博世的道路特征服务不仅仅可以用于自动驾驶汽车的定位,还能参与到高精度地图的众包采集之中。在国内,博世主要与百度、高德、四维图新三家高精度地图供应商达成了合作。
刘玉磊指出,随着智能网联汽车的普及,未来搭载博世道路特征识别传感器的车辆会越来越多,传感器也会变得更加智能,高精度地图众包采集的效率将会越来越高。
结语:传统Tier1秀出自动驾驶底层技术肌肉
虽然自动驾驶创企在这一领域开始得更早,但传统Tier1在自动驾驶技术的研发上也进入了全面发力的状态。不论是博世、法雷奥还是国内的德赛西威,都在从底层发力逐步攻破自动驾驶难题。
此次博世对外分享两大精准定位方案,就是在向外界展示其在自动驾驶底层技术上的雄厚实力。随着自动驾驶汽车在技术力与普及程度上更进一步,凭借与主机厂的合作渠道,传统Tier1的实力将会很快显现出来。

