







智东西(公众号:zhidxcom)
编 | 王颖
导语:新型水下机器人能在30秒转换成人形,脱离人工控制完成深海任务。
智东西2月17日消息,几个月前《IEEE Spectrum》的特约编辑Evan Ackerman来到了美国宇航局用于训练宇航员的泳池,去看Houston Mechatronics公司制造的机器人潜艇Aquanaut,它可以熟练的在水中变成人形。
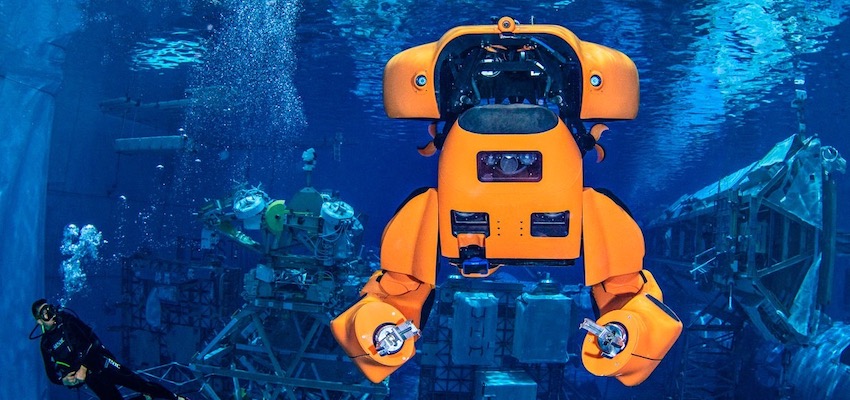
Aquanaut的外表是明亮的橙色,造型就像一艘微型潜艇一样。从外表看来,它和其他无人驾驶水下机器人没什么不同,但它内部配备了用于手机数据的传感器和用于前进的推进器。
Aquanaut代表了一种全新的设计,它的创造者Houston Mechatronics公司希望Aquanaut能够彻底改变海底机器人技术。
一、水下机器人变形过程类似变形金刚
Aquanaut变成人形的过程就像电影《变形金刚》中的场景一样,机器人外壳的顶部升起,从两边展开两条巨大的手臂,一个装满传感器的楔形头旋转到位,在几秒钟内,转变就完成了。这时,原本光滑的潜艇已经变成了一个半人形的机器人,准备开始工作。
Evan Ackerman进入了泳池,感受失重状态下的漂浮,只有任务控制中心可以通过耳机与他沟通。离他不远的地方有两名宇航员正在练习太空行走,可是他没有精力去参观太空训练的过程,他此行的主要目的是来看水下机器人Aquanaut。
传统的无人水下机器人通常分为两类,于远程测量任务的鱼雷式自由游动潜水器,以及用于支撑船只并用于水下操纵的四方形远程遥控机器。Houston Mechatronics希望能将这两种模式组合成一个机器人,这是一个前所未有的大胆尝试。
Aquanaut的设计主要是为海底石油和天然气装置提供维修服务,这些装置需要拥有和运营这些设施的公司花费大量资金来检查和维护它们。在海底的极端工作环境中,他们所依赖的机器人技术几十年来从未发生过根本性的变化。
Houston Mechatronics的75名员工中,有超过24名曾经为NASA工作过,在极端环境下爆发创造力就是他们擅长的。Houston Mechatronics的联合创始人兼首席技术官Nic Radford曾在休斯敦的美国宇航局约翰逊航天中心从事高级机器人项目工作14年。他说:“进入水下比进入太空更困难,太空是一个原始的环境,而水下的事物是非常动态的,我没办法定论在机器人在水下工作比在太空中难10倍还是50倍。”
Aquanaut可以从一艘专为远距离巡航设计的灵活潜艇变成一个能够执行复杂操作任务的半人形机器人。以下是机器人变化的过程:
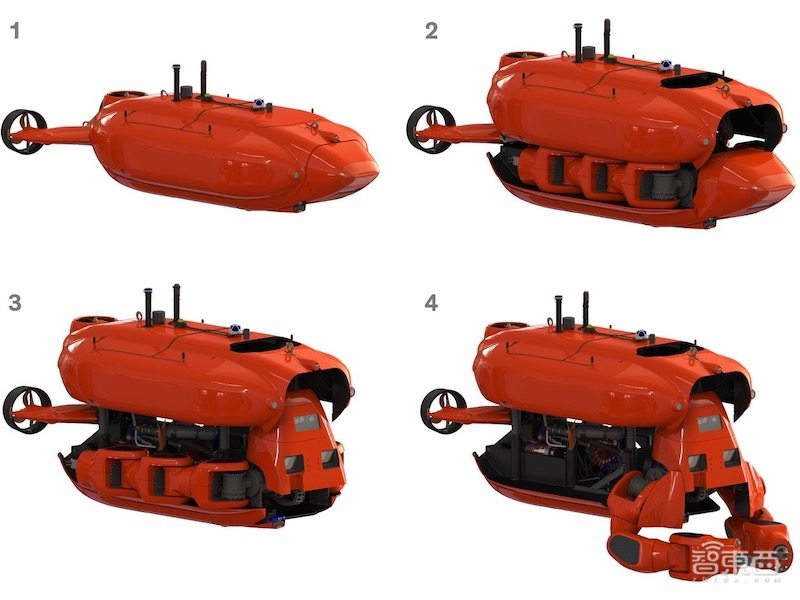
1. Aquanaut以简化的潜艇模式前往海底工作场所。
2. 一旦机器人到达现场,其船体的顶部就会上升,暴露出两个巨大的手臂和一个楔形的头部。
3. 头部携带立体摄像头,3D传感器和声纳系统,旋转到位。
4. 机器人展开其强大的手臂,配备力传感器和爪式夹钳。
自2014年Houston Mechatronics成立以来,Nic Radford和其他联合创始人Matt Ondler和Reg Berka已经筹集了超过2300万美元的风险资本。
二、Aquanaut可远程控制修复深海装置
我们所看到和听到的关于海上石油和天然气工业的大多数工作都是在平台上完成的,人们在平台上从海面进行水下钻探作业。 平台是整个过程中最明显的部分,但海床上也有大量复杂的基础设施。
Nic Radford说:“把机器人放在偏远的地方,让它们在严酷的数据环境中做有用的工作,最适合这个大问题: 离岸工作。”
海底的井口由金属组件覆盖,用于控制碳氢化合物流向地表。 这些结构覆盖着管道、阀门、歧管、和仪表,有些有四层楼那么高,通常被称为“圣诞树”。
为了对井口进行日常维护,或者改变井的输出,必须转动“树”上的一些阀门,而且在300米以下的深水井中,潜水员通常无法进行操作,唯一的方法是使用机器人潜水器。

几十年来,在深水油井上工作的既定程序一直是向油井地点发送远程操作的水下航行器( ROV)。 但是,除了发送ROV本身,还必须派遣一艘载有训练有素的人员的大型辅助船只作为ROV的操作基地,ROV几乎或根本没有自主权,需要通过水面人员的操作获得动力和控制,这项工作非常昂贵,每天要花费数万到数十万美元。
Houston Mechatronics的计划是减少水下机器人对水面控制的需求,Aquanaut不需要缆绳或支援船。它将以潜水艇模式前往其深海目的地,在那里它将变形为人形,展开手臂进行工作。Aquanaut的每个手臂都装有力矩传感器,并有八个运动轴,类似于人类手臂。
Aquanaut上的机械手臂还有能够转动水下“圣诞树”的阀门,甚至可以操作机器人在内部有效载荷舱中携带的专用维护工具。
Aquanaut将执行由人工操作员监督但不直接控制的任务。 任务完成后,机器人将自动返回。Nic Radford表示,这种方法将使Aquanaut的部署速度更快,运营成本也比现在的ROV更低。 他估计,成本可能远低于传统业务市场价格的一半。
经过无数次的迭代设计后,Aquanaut终于诞生了,但在真正进入海底工作之前,它还需要在更加可控的条件下证明自己,这就意味着Aquanaut还要在NASA的泳池里先练习“游泳”。
美国宇航局中性浮力实验室(NBL)可以容纳2350万升水,最大深度为12米,足以容纳国际空间站大部分的全尺寸模型。2019年3月下旬,Houston Mechatronics已经部分接管了NBL,来测试Aquanaut。
在水下10米处,Evan Ackerman背着两个氮气罐,在水中跟踪机器人。到目前为止,Aquanaut已经顺利进行了8天的测试,唯一的问题是手臂出现了通讯故障,但Houston Mechatronics并不担心,他们知道要使Aquanaut能达到真正的工作标准,还有很多工作要做。
三、Aquanaut应用面临三大难题
根据海底技术先驱Chuck Richards的说法,过去几年的低油价削减了利润,导致石油公司之间的竞争加剧,推动了新技术的采用。 Chuck Richards的在休斯敦的公司CA Richards&Associates为数十家海底公司提供设备,其中包括Houston Mechatronics公司。
Aquanaut相对于传统ROV的主要优势在于其不受限制的操作。Houston Mechatronics必须解决几个关键问题才能实现其功能。
首先是让机器人在没有大型支援船只的情况下到达海上工地。Aquanaut在潜艇模式下可以行驶200多公里,到达目的地后将自动转换成ROV模式,隐藏在船体内部的附加推进器能使其更具有机动性。
机器人变形的过程是另外一个重大挑战,也是Houston Mechatronics内部一直在争论的焦点。Aquanaut的首席工程师Sandeep Yayathi认为,建造Aquanaut的好处远超其复杂性带来的困难,最终他们还是决定突破重重困难完成Aquanaut的设计。
为了使Aquanaut能够如此大幅度地改变其形状,该机器人配备了四个定制的线性驱动器,将机器人的上半身和下半身分开。额外的电机,也是高度定制的,安装在防水外壳中,驱动手臂和头部。 在动力方面Aquanaut使用了一种类似于电动汽车使用的锂离子电池。从潜艇到机器人的完整转换只需要30秒就可以完成。
也许这些挑战都不如设计Aquanaut的控制系统那么重要。传统的ROV具有多个实时摄像机进行视频传输,人类操作员可以实时操纵这些机器人。

Aquanaut的唯一通信方法是通过一个声学调制调节器进行,这项成熟的技术虽然在水下有几十公里的范围,但同时具有高延迟和底带宽的劣势,它的传输速度最快只有几千字节每秒。Houston Mechatronics计划依靠小型无人水面舰艇作为机器人和通信卫星之间的中继站,以便于在任何地方控制Aquanaut。
Houston Mechatronics计划对Aquanaut进行高级监督控制,将大多数低级决策委托给机器人的机载计算机。这些计算机运行机器人操作系统(ROS),这是一个用于研究和商业机器人的流行软件平台。机器人利用头部的传感器组件,包括立体摄像机、结构光传感器和声纳系统,构建出周围环境的详细3D渲染图。Aquanaut将高度压缩的子部分传输给操作员,将它们与现有的结构模型进行匹配。
然后,操作员发出简单的指令,比如“将阀门在这些坐标处顺时针旋转90度。”机器人将自主决定如何抓住阀门以及转动时施加多少力,并在完成任务后发回确认信息。操作员仍在指挥机器人的动作,但是不需要手动操作机器人,也不需要高带宽的实时视频传输。
四、Aquanaut将有可达3000米深海放大版本
Houston Mechatronics的长期计划是将Aquanaut的能力作为一种服务出售,使用分布在北海或加利福尼亚沿海地区的小型机器人舰队,石油和天然气公司只需要简单地要求完成指定的任务,Houston Mechatronics就会安排最近的机器人来处理它。

Nic Radford说:“操作单一传统ROV大约需要7个人,我们认为我们可以反过来,一个人可以操作7个Aquanaut”
休斯顿大学机械工程教授兼国际海底工程研究主任Matthew A. Franchek表示,由于低带宽连接和操作员只是在循环中间歇性地运行,因此出现问题的风险可能更高。他说:“Aquanaut具有很强的不确定性,我担心在操作过程中出现故障,这可能会带来财务和环境方面的严重后果。虽然这项技术令人兴奋,但他们需要证明它能够发挥作用。”
当前版本的Aquanaut主要是一个演示和测试平台,专为相对较浅的水而设计,最大操作深度为300米。虽然这个版本可以在世界许多地方进行商业运营,但Houston Mechatronics已经在设计一个可以行驶数百公里并达到3000米深度的放大版本,可以为墨西哥湾等地区提供服务。
结语:水下机器人或将完成更多非商业性工作
商业运营并不是Houston Mechatronics为Aquanaut所做的唯一探索。2018年底,美国国防部高级研究计划局宣布了一项名为Angler的计划,旨在“开发一种海底自治系统,可以导航并物理操纵海底物体。”美国国防部高级研究计划局在发布声明时附上了一个带有两条手臂的流线型机器人潜水艇图像,这一概念对Houston Mechatronics公司来说是个好机会。
Aquanaut已经为下一次NBL测试做好了准备。它的第一次开放水域演示可能会在八月份在罗德岛举行的海军技术演习中进行。Nic Radford表示,从事大胆创新的工作是他的兴趣,它们将证明有更好、更具成本效益的方式完成水下工作。
原文来自:IEEE Spectrum
