







智东西(公众号:zhidxcom)
编 | 云鹏
导语:更灵活的双脚、更好的感知能力以及全面定制化的模块让Digit v2成为波士顿动力产品的强力竞争对手。
提到双足机器人,波士顿动力几乎吸走了全部光彩,但还有另外一家公司,去年获得800万美元A轮融资,正悄然跻身玩家阵营,它就是Agility Robotics。
最近,该公司新推出了Digit v2行走机器人,通过脚步滚动自由度实现了静态平衡,躯干各模块的定制化可以满足更多客户需求。在发展类人机器人市场的路上,Agility Robotics将安全性视为最重要的一环。
针对Agility Robotics推出的新产品,IEEE Spectrum的记者对CEO Damion Shelton进行了采访,了解了双足机器人当下技术的最新进展。以下为采访实录的原文编译。
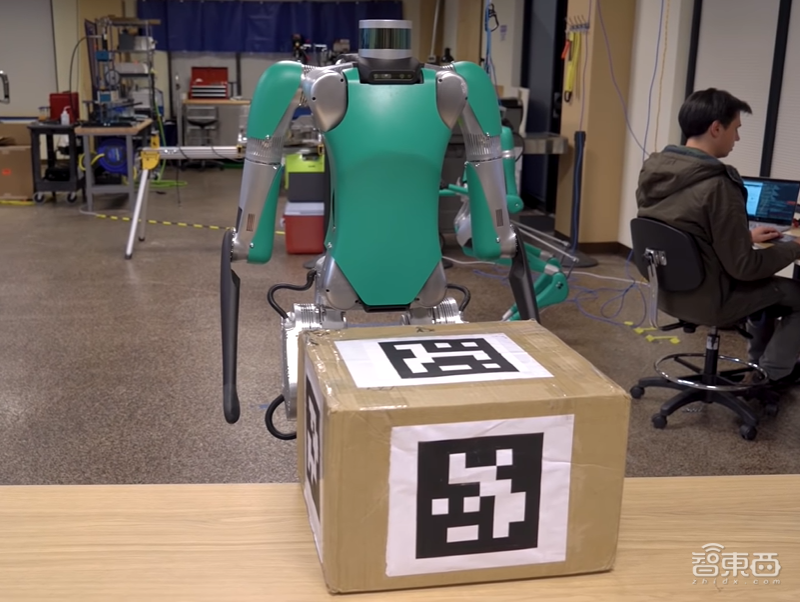
▲Digit v2从桌子上拿起盒子
一、理想照进现实
上次我们看到Agility Robotics的两足机器人时,它正从福特货车上捡起一个盒子,努力避开楼梯,草地和小孩,然后放在门廊上。作为一个演示,它的确令人印象深刻,但是要知道,拍一个机器人自动送货的演示视频和把它实际投入复杂世界中应用并且可靠的完成任务,这两者之间可是存在非常大的差距的。
当然,Agility Robotics是了解这一点的,在过去六个月中,他们一直在对Digit进行重大改进,让它更加强大。今天发布的新视频展示了Digit系列的最新版本——Digit v2的新增功能。
我们非常高兴Agility Robotics发布了有声视频,这使我们可以准确地听到Digit在操作中的声音。最显着的变化是Digit的脚,躯干和手臂,令我印象最深刻的,就是Digit在把桌子上的盒子拿起来之前,会反复调整角度,以保证充分稳定的抓握。但是其他的新变化则很难在视频中体现,因此我们邀请了Agility Robotics的CEO Damion Shelton,希望能为我们带来Digit系列的最新进展。
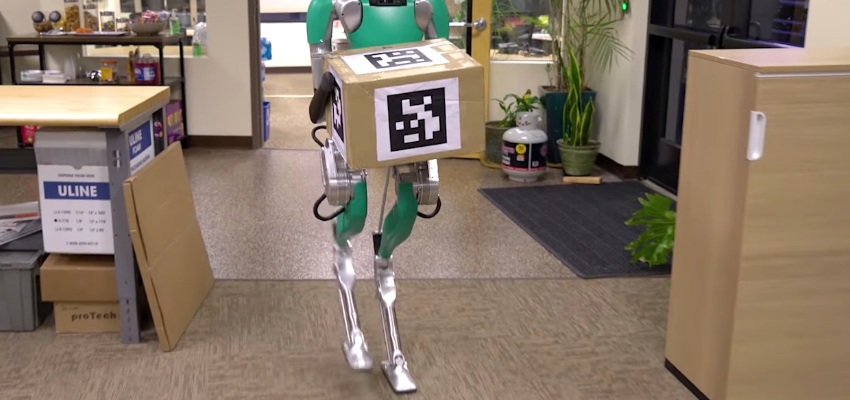
▲Digit v2的行走过程
二、新的脚、手臂、躯干和更强的自主性
IEEE Spectrum:您能否总结下Digit v1和v2之间的区别?我们对这双新脚特别感兴趣。
Damion Shelton:这双脚现在具有可滚动的自由度,因此Digit可以抵抗侧向力而无需侧向踩踏。这使Digit v2可以静态平衡一只脚,而Digit v1和Cassie则无法做到这一点。较大的底脚还可以显着降低单位面积的负载,从而在非常柔软的表面(如沙子)上提高性能。
它的感知模块包括用于检测障碍物和辅助拾取/放置动作的四个英特尔实感摄像头(Intel RealSense cameras),以及激光雷达。在Digit v1中,出于开发目的,感知系统是逐渐增加的。而在Digit v2中,所有感知系统从一开始就处于活动状态,并绑定到专用计算机上。感知系统除了用于操纵之外,还用于其他许多方面,我们将在接下来的几周内展示给你们。
躯干的变化更加隐性。现在机器人中的各种模块都可以实现定制化,热量可控并且密封。我们还为载重架提供了电源和网络连接,可以适合NUC或Jetson模块(或其他客户的载重模块)。
▲Digit v2成功将货物送至目的地
IEEE Spectrum:就Digit的自主性(autonomous capabilities)而言,我们在视频中到底看到的是什么?
Damion Shelton:目前,这是部分自主性(shared autonomy)的展示。Digit拾取和放置盒子是完全自主的,平衡和脚步放置也是完全自主的,但引导和躲避障碍物还需要本地处理。Digit不再像早期视频中那样需要无线电控制器 ;我们还没有准备好透露当前的控制器设计,但这是一个相当重要的升级。这是v2硬件,因此在2020年发布之前还有一个完整的版本正在开发中,这将大大扩展自主性范围。
IEEE Spectrum:Digit v2有哪些独特功能是视频中没有明显展示出来的?
Damion Shelton:对于那些使用Cassie机器人的人来说,充放电的人机互动做的更加友好了。Digit可以在不到5分钟的时间内拆解成可随身携带行李大小的物品(送或取),以便于运输。使用普通笔记本的充电器就可以给Digit充电。
三、安全性是双足机器人产业关注的焦点
IEEE Spectrum:我对在Digit和许多其他双足机器人中能看到的这种呆板的步态感到好奇,让它们走路更加像人(大概更安静)的步态是否存在很大的挑战和困难?
Damion Shelton:唯一的困难就是脚步和控制的复杂性会大幅增加。Digit v2较大的脚部表面积有助于降低噪音,并且与Cassie或Digit v1相比,v2具有更好的被动动态性能表现。v2的脚部设计是全新的,比如脚后跟的特性和表现就是一个活跃的发展领域。
IEEE Spectrum:Digit v2离商业化的道路还有多远?
Damion Shelton:我们有望在2020年推出Digit v3。从v2到v3的更改本质上主要是错误修复,并进行了一些法规升级,例如完整的电池认证。安全是我们的主要关注点,我们已经有了一些客户,这些客户将在安全的环境中使用Digit,并采用分阶段的方法来缓解运营限制。Digit将会在充分的掌控下运行,但同时我们也会谨慎操作,直到获得支持安全性和可靠性的统计数据为止。如果不顾潜在安全风险行事,很容易给双足机器人产业带来破坏性影响。
Digit(或任何其他类人机器人)在人群中完全自主运行还需要一段时间,但其他的市场机会还非常多(想想室内工厂和仓库环境),不过在大力发展机器人市场前,我们始终会将操作的安全性放在首位。
结语:双足机器人工业化应用场景广阔,商业化还需解决安全问题
从Digit v2可以看出,双足机器人动作的拟人化还有一些技术难题需要解决,目前所具有的功能,基本可以应对工厂和仓库的工作场景,因此广阔工业市场应该是各大厂商的下一个争夺点。
但就像Damion Shelton所说,在商业化的道路上,如果不重视潜在的安全风险而心急行事,把双足机器人产业搞砸并非难事。
