








智东西(公众号:zhidxcom)
文 | 李星宇
(本文转载自地平线机器人技术。)
编者按:本文作者李星宇,是地平线机器人汽车业务总监。毕业于南京航空航天大学,获得了自动化学院测试仪器及仪表专业的学士和硕士学位;曾任前飞思卡尔应用处理器汽车业务市场经理,原士兰微电子安全技术专家。李星宇有13年半导体行业从业经验。他在加入飞思卡尔的早期,任职于i.MX应用处理器研发团队,在该领域取得一项NAND Flash存储应用美国专利。在加入飞思卡尔之前,他在士兰微电子负责安全芯片的公钥加密引擎设计,该引擎的RSA/ECC加解密性能处于国内领先平。
正文:
近日,美国政府表示计划在30年内把国内的交通事故死亡人数降为零。这个计划的背景,则是美国国家高速公路交通安全管理局宣布,美国2016年上半年的交通事故死亡人数增长了10.4%。而自动驾驶被认为是实现这一计划的基石。
“这个自动驾驶技术到底什么时候能成熟?”谈起自动驾驶,这应该是公众问的最多的一个问题。
今年三月,在德州奥斯汀举行的SXSW互动媒体活动上,谷歌无人驾驶项目技术负责人厄姆森表示“自动驾驶车的真正出现可能比曾经预测的时间要晚很多,最长可能需要30年”。而在2009年,谷歌无人驾驶项目开始之初,厄姆森曾经雄心勃勃地表示,希望在2019让谷歌的无人驾驶车上市。
但拉里佩奇显然没有这样的耐心,在今年的一期TED节目上,拉里·佩奇在谈到无人驾驶时表示,他在大学时代就萌生了这样的想法,并对这个项目的潜力非常兴奋,被问及无人驾驶何时实现时,他说:“我认为会非常非常快,我很热衷于尽快推出产品。”他更进一步阐明了自己的态度:“我们需要革命性的变化,而不是改进性的变化。”
去年,谷歌找来了汽车业老将,原现代汽车美国分公司CEO克拉富西克担任无人驾驶项目主管,业界普遍的解读是:谷歌将会把这个项目从X lab中分离出来,开始其商业化之路。
但路在何方?到底是自己造车,还是提供软件产品授权,或者是像Uber那样直接运营?这是业界反复揣测的话题,克拉富西克在7月份接受《彭博商业周刊》采访时坦言,谷歌还没有确定无人驾驶汽车的商业模式。外界的声音更为尖锐,Speak With Me公司CEO阿杰·朱内贾认为,谷歌没有制定清晰的商业化计划;市场咨询机构Strategy Analytics则直言不讳地表示:谷歌需要一个合作伙伴、一个销售团队和一项市场策略。
8月初,厄姆森黯然离开谷歌,这位卡内基梅隆大学的机器人专家离去的背后,无疑折射出谷歌在自动驾驶方面的愿景与商业化方面的巨大裂痕。
谷歌已经在多个公开场合表示其无意成为一家整车制造商,而是寻求合作,但现实是,我们看到了特斯拉和强势的ADAS技术供应商Mobileye高调分手,看到了通用投资十亿美元对自动驾驶初创公司Cruise Automation的收购,福特汽车对以色列机器学习与计算机视觉公司SAIPS的收购,以及与自动驾驶相关的至少3家初创公司的投资,宝马、丰田等对硅谷初创企业Nauto的联合投资,其他车厂也都在加紧网罗人才,主流车厂正在掀起一场自动驾驶的军备竞赛,他们准备自己干。与车厂合作并不是一件容易的事情,尤其是对下一代核心技术而言。如果一家公司不准备自己造车,又在自动驾驶这件事上太过高调,往往会适得其反,成为合作的障碍,毕竟,汽车是品牌认知度最高的行业之一,车厂不想被供应商抢了风头。
“自动驾驶将定义下一个十年,我们预测自动驾驶汽车将为社会带来巨大的影响,就如同一百多年前福特汽车发明的流水线那样。” 福特汽车CEO马克·菲尔兹的一句话道出了自动驾驶对于汽车行业的意义。也许正因为这样,拉里·佩奇才会执着地希望实现完全意义上的自动驾驶。
自动驾驶卡车异军突起
但现实却每每出人意料,今年年初,谷歌无人车团队技术天才莱万(Anthony Levandowski)和谷歌地图原负责人Lior Ron离开,成立了初创公司Otto,仅仅半年后,移动出行巨头Uber就在7月份宣布以6.8亿美元高价收购Otto,考虑到这家初创公司仅仅成立半年,可以断定他们主要依赖来自之前在谷歌开发的技术。而现在,这项技术的商业价值已经得到投资方认可,商业化前景非常明确:提供面向货运卡车的自动驾驶运营服务。

为什么同样的技术在商业化方面会有如此巨大的落差?答案需要回到当前的市场现状中去寻找,先来看一下目前美国的货运市场现状:
1.美国卡车运输产业价值7000亿美元,足够大;
2.2015年美国有160万卡车司机,占美国工作人口的1%,卡车司机平均年龄高达55岁,显示该行业对年轻人吸引力不足,招人难,目前有5万名大型货车司机的缺口(据美国卡车运输协会数据),成为物流公司的难题。
因劳动力短缺,预计每英里收入将从目前的0.3美元上涨到0.7美元。
如果使用自动驾驶,对于物流公司而言,人力成本的节约是毋庸置疑的,(虽然会导致超过1%的劳动人口失业),服务区、汽车旅馆、餐饮等开销也基本不需要了,车险费用大幅降低;生产效率方面,自动驾驶车可以做到7×24小时运转,即使考虑到车辆维护以及货物装卸的时间消耗,每周140小时的行驶时间也是有人驾驶的三倍以上。这意味者资金周转率的同步提升。
从部署成本上讲,如今大型卡车售价基本在15万美元以上,Otto目前的自动驾驶套件成本大约3万美元,从成本下降空间上看,5年内降低到1万美元是非常有可能的。
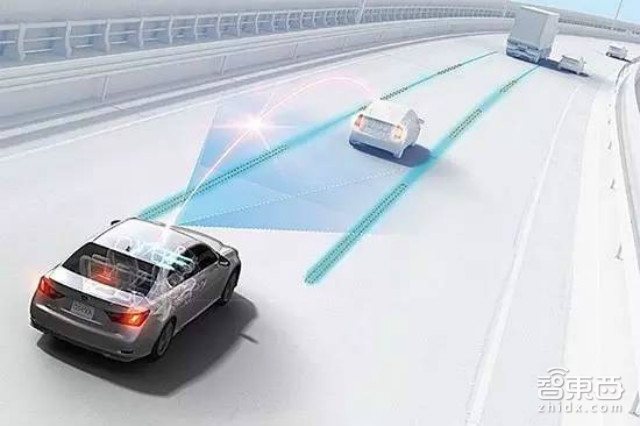
技术上,卡车主要运行在高速公路上,而高速公路场景下的自动驾驶技术相对于城市道路要简单得多,传感器可以安装在离地面更高的位置,因此可以探测得更远。因此在这一领域的自动驾驶可以在短时间内达到商业化所要求的成熟度。
虽然精确的成本计算依然需要更多的数据,但上述数据已经能让人相信,基于自动驾驶的物流成本将会降低2倍以上,而资本收益率将可能提高十倍以上。
根据路透社的消息,Uber从明年开始就会提供货运服务,不得不说,Uber的眼光很准。更多的公司开始跟上,欧洲六大卡车制造商(包括沃尔沃、戴姆勒、达夫、依维柯、曼、斯堪尼亚)已经组建超 12 辆车的无人驾驶卡车车队上路测试。
自动驾驶货车可能会深刻改变物流行业,催生例如标准化的装卸站这样的场所,在该场所内,人类司机将负责与刚刚从高速公路出口下来的自动驾驶货车进行货物的交接,完成最后一百公里的运输。
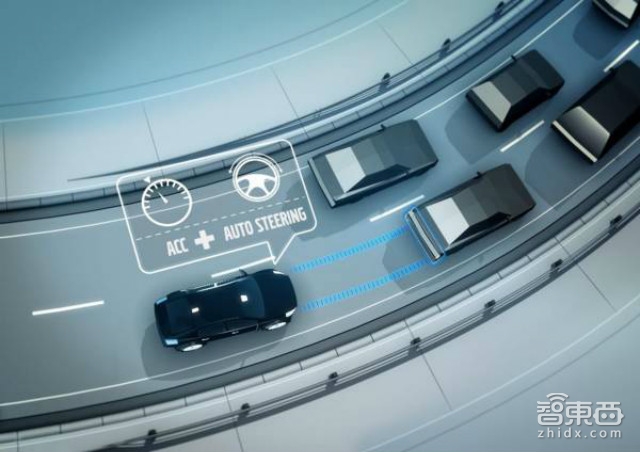
回过头来看Otto的成功,它其实是一个技术与市场结合的漂亮案例,一项技术的研发,一开始也许是面对一个极为长远的目标,但其技术达到一定程度后,在某些场景下就可以产生商业价值了。因此通过限定使用场景,就可以降低技术实现难度。在高速公路货运这个场景下,我们甚至可以进一步降低技术难度,例如使用有人领队的编队行驶,在这一模式中,一名人类司机驾驶头车,后面跟随5至10辆无人车以密集间距行驶,这意味着5~10倍的劳动力效率提升,其商业价值可见一斑。
自动驾驶的应用之路
目前公众对于自动驾驶的质疑,其实是有一个假设的前提,那就是允许汽车在任何时候,在任何开放道路上都可以行驶,这无疑是终极目标,但你能想象自动驾驶车如何听从操着方言的交警指挥吗?拿一个最难的场景去评估一项在发展中的技术,自然很容易得出较为悲观的结论,而事实上,正如我们在前面看到的自动驾驶卡车的例子一样,商业价值的产生是有多样化的,在达到终极目标的过程中,或者限定场景,或者限定功能,就有可能将自动驾驶应用落地,产生商业价值。
如果顺着与自动驾驶卡车相同的思路去探索商业化路径,会发现不少行业都可以在短期内可以实现:
- 仓储物流行业:领先的电商如亚马逊和京东已经部署了AGV;
- 用于农业的自动驾驶车辆:包括可以进行耕作和收割的农业机械,在非道路上进行低速移动的场景难度很小,转场时可用其它运输车辆转移;
- 局部封闭场所:如度假村、旅游景区、机场、矿区、码头、建筑工地等,在该应用下的车辆多数是特种车辆,如挖掘机、起重机、小型电动车等。
随着技术的进一步发展,更多的自动驾驶场景将得以实现:
- 城市公交系统:有固定的行驶线路,例如使用公交专用道,可以有选择地施行自动驾驶。
- 商业运营车辆:如出租车、公司班车等。
对于私人车辆,其自动驾驶的应用普及也可以按照场景的不同范围逐步扩大:例如先在高速公路上实现;然后是停车场,最后才是开放道路。一份来自通用汽车的调查显示,在超大型城市,30%的汽油浪费在寻找停车位的过程中,而中心城区的停车时间通常超过15分钟,停车场的自动驾驶其实意义很大,而停车场的驾驶环境也相对友好,不存天气因素,速度也低,也是封闭场所,其实现难度明显要比开放道路低。
商业化的逻辑
无论自动驾驶的应用场景是什么样,这背后始终有三个核心原则需要满足:技术上成熟度达到该应用场景的要求;投资成本可接受;投资回报达到突破点。相对于之前的有人驾驶,必须能够减少成本或者增加收益,并且这种商业收益是可以被量化的,一句话——部署自动驾驶就意味着省钱或者赚钱,否则只能落入作秀的场景。
因此,自动驾驶的商业化路径,在不同国家也势必各不相同,因为相同的应用场景,成本结构不同,例如出租车行业,美国的出租车人工成本显然要比中国高非常多,这也是Uber在自动驾驶技术的投入上如此激进的原因之一。
在国内,一线城市都在积极推动自动驾驶的测试实验区开发,背后的商业化驱动力不容忽视。北京市超过20%的路面是被汽车所占据的,而一辆私人汽车的实际利用率通常只有不到10%,超过90%的时间里都处于泊车状态,这带来了两个巨大的难题:停车难、拥堵(潮汐式通行,寻找停车位造成的局部路段拥堵)。解决之道呢,从传统上讲,需要修建更多的停车场,以及更多的道路,而这无可避免地要消耗土地,现在的一线城市土地是什么价?上海平均超过一个亿/亩,如果我们能利用自动驾驶提高车辆利用率,停车场就可以少建,如果少停10万辆车,则省出来的停车场面积至少是1.6平方公里,价值2400亿元!道路资源也是一样,如果可以利用自动驾驶结合绿波带通行,将道路利用率提升一倍,则很多道路就可以重新规划,例如减少新建道路,或者旧的道路连同小区集中拆除,做整体改造,对于土地的节约是显而易见的。
成本同样是无法忽视的,一项先进的技术,其商业化之路,往往是伴随着成本的下降逐步展开的。今天,我们的大部分汽车上都安装有雷达,但当雷达最初投入实用,是在二战前夕,1936年英国人在索夫克海岸架起了第一个雷达站,之后在二战中,雷达技术在巨大的军事需求下得到飞速发展,从地基防空雷达扩展到舰载雷达,随后机载雷达也出现了,之后雷达才渐渐步入民用,二十年前雷达才开始应用于汽车,而77GHz毫米波雷达在汽车上的应用只是近几年的事,这里面固然有技术的因素,但成本无疑是决定性的,毕竟汽车是大众消费品,成本的因素无法忽视,对于自动驾驶同样如此,在成本没有降低到一定程度之前,在乘用车上的普及是不可能的。
不可忽视的技术因素
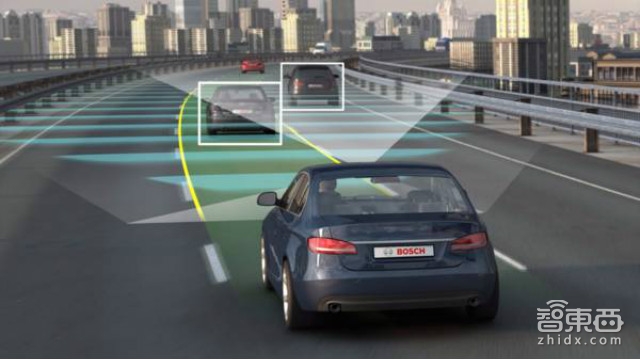
目前,几乎所有的自动驾驶测试车都是基于自主感知的模式,也就是利用多种不同种类的传感器对环境进行感知。但是,任何一种传感器都是有局限性的,而传感器融合并不是那么容易做到。例如,雷达探测到前方有强烈的回波并确认这是一个很大的障碍物,而摄像头却没有看到,这时该相信哪一种传感器的数据?而真实情况可能是前方有一个易拉罐,它放大了雷达的回波。
自动驾驶所需要的安全性如此之高,必须有多重冗余的感知手段,V2X在这里扮演了非常关键的角色。与摄像头或者雷达不同,V2X是一种精确感知手段,依靠802.11p或者5G通信,V2X可以在大得多范围内(室内300米,室外1000米)准确感知周围车辆的态势,包括其位置、车速、转向灯状态等,同时,通过与道路基础设施的通信,获得局部范围的精确地理信息;V2X使动态的车队组网成为可能,并且可以通过V2I,实现绿波带通行;V2X不会受到天气条件的影响,这一切是其它传感器难以企及的。可以说,V2X使自动驾驶的可靠性发生了质的飞跃。
但V2X是典型的依赖于标准的技术,这意味着其真正主导者只有一个:政府。目前,中国的V2X的标准还在制定中,LTE-V技术也才刚刚开始研究,距离实用化还有很长的路要走,这折射出政府决策的复杂性,这使得V2X部署时间很难预测,而局部封闭场所的V2X部署要容易得多,一家公司就可以在机场或者某个园区部署V2X,并且由于是封闭场所,不需要考虑互联互通,或者标准的问题,因此商业化实施的效率就很高。
V2X的价值依赖于它的普及率,如果公路上的车辆V2V的覆盖率不是100%,那它的意义就会大打折扣,V2I则需要基础设施方面的大量投入。目前自动驾驶研发方面,媒体的聚光灯对准的依然是车厂,但如果要让V2X达到全覆盖,政府的作用是不可替代的。和任何一项大规模的基础设施投资一样,V2I的部署不可能一开始就规划全覆盖,而是先从局部开始,因为这样的投资必须考虑商业回报。我们可以设想,政府可能会先在几条主干高速公路部署V2I,例如G2京沪高速,长三角城市带高速等,以提升道路利用率,获得更高的商业回报。
今天,自动驾驶的感知和决策环节的主流技术发展方向逐渐清晰,即基于深度学习与增强学习结合的机器学习,但机器学习需要大数据的驱动才能达到高性能和高可靠性。这意味着,开发者需要将自动驾驶设备先安装到大量的车辆上,让车辆在实际运行中才能产生所需要的数据量,结果就会陷入鸡生蛋还是蛋生鸡的问题:一开始自动驾驶的可靠性不好,无法出售大量设备;设备量不足导致数据量不够,又会制约性能的提升。如果最开始先在某些特定应用方面进行部署,则可以逐步积累数据,提升性能,为更大范围的自动驾驶应用做好准备。
谷歌自动驾驶从七年前开始测试,到现在也只跑了3百万公里,而特斯拉的Autopolit从15年10月启用以来的多半年内,已经积累了1.6亿公里以上的行驶里程;Uber更夸张,摩根士丹利曾在一份报告中称:“Uber在24分钟内收集到的数据,就相当于谷歌自动驾驶汽车自诞生以来记录下的所有数据。”
这就是通过量产车积累数据的优势。说到底,基于数据驱动的技术必须在实践中才能完善,单个公司的测试规模有限,而且效率太低。在技术史上这样的例子不胜枚举,苹果在推出第一代iPhone的时候,上市后仅仅几周,用户就发现了几百个bug,这还是质量要求苛刻的乔布斯的作品。
同时,自动驾驶的开发还有高度的地域性特点,欧洲和北美的驾驶环境不同,中国的驾驶环境与欧美差异更大,比如司机变道频繁、人车混行严重等,车辆特征差异大、道路系统复杂等,这些本地化因素往往导致本来在欧美比较成熟的功能,如变道、过十字路口等,在中国实测的成功率急剧降低。从这个意义上讲,本地化的数据处理和自动驾驶决策算法开发是无法回避的,在这个问题上,地平线机器人与相当多的国外车厂和国际Tier 1都有广泛的讨论,各方都有高度认同。
历史的启迪
美国智库兰德公司在其发布的《驶向安全》报告中认为,自动驾驶的安全性需要数亿至数千亿英里,才能验证其可靠性,凸显了在开放道路上全自动驾驶的复杂性,以及由此带来的在测试方法上的巨大挑战。
凭借在机器学习方面的出色成绩,地平线机器人在自动驾驶领域吸引了业界的广泛关注,同时,地平线定位于做自动驾驶解决方案的Tier 2供应商,与多家车厂和Tier 1保持了广泛的沟通,并与其中的多家合作伙伴进行了深入合作,这样的一个比较偏上游的定位,给了地平线一个很好的视角,去观察并思考这个行业,更多地从市场真实需求从出发,去制定相应的技术路线图,在通往完全无人驾驶的终极目标的路上,确定了较多的中间节点。我们相信ADAS依然会持续演进,从目前的Level2向Level3过渡,最终朝Level4的自动驾驶发展;而在技术研发上从感知,到三维场景语义理解,再到环境态势预判、路径规划,场景方面逐渐扩大其适用面,从高速公路到一般道路。同时,ADAS也会从外部感知扩展到对司机的感知和理解,确保在自动驾驶和手动驾驶方面的过渡可靠性。

一个有远大抱负的企业往往会希图毕其功于一役,一步到位将革命性的技术投入商业化。摩托罗拉一手开创了移动通信时代,当时移动通信最大的挑战是地面基站的覆盖面不足,并且基站之间的切换可靠性也很差,于是这个当时的技术巨人在发展新一代移动通信技术时,决定建设一个卫星通信系统,彻底解决这一问题,这就是著名的铱星系统,在技术上这是一个伟大的设想,但是令人始料未及的是,地面基站的建设速度超乎预期,并且在普及过程中可靠性逐步完善,而依靠摩托一己之力的铱星系统却独木难支,巨额投资导致服务费用高昂,盈利回报达不到预期,最终黯然退出市场。
从某种意义上讲,一个系统,无论是技术,还是政治、经济,只要足够复杂,就很难有一步到位,推出一个完善、可靠的系统。二十多年前,当前苏联的铁幕无奈落下时,福山发出了著名的论断:历史的终结,他乐观地认为,自由民主制度是“人类意识形态发展的终点”和“人类最后一种政治形式”,而时至今日,中东乱局恰恰证明了自由民主革命不见得会带来一个更好的政治生态,改良的成功例子似乎更多。俄罗斯也试图用休克疗法重建一个完美的经济格局,结果一败涂地,反而是中国的渐进式改革取得了巨大成功。在今天自动驾驶的喧嚣声中,历史的启迪或许值得深思。


