







导语:汽车产业经历剧变,自动驾驶浪潮来袭。是被浪潮吞没,还是屹立于浪潮之巅?如何摘得“人工智能项目之母”桂冠,用智能代替双手掌控车辆?从9月14日起,智东西重磅推出9堂自动驾驶系列课。9位实战派导师将为大家奉献超过810分钟的系统讲解和深度互动,完成对 33个知识点的专业拆解,和你一起建立未来汽车的知识壁垒。
第5课为镭神智能创始人胡小波讲解,主题为《激光雷达在辅助驾驶和无人驾驶中的应用》。
在车东西公众号对话框回复“自动驾驶”,获取系列课PPT下载。
本课干货以及胡小波所述精彩观点,智东西摘录如下,一分钟概览课程。
要点速览
1、激光雷达技术原理
激光雷达原本用于测绘,从技术原理分,主要有三角法激光雷达、TOF系列激光雷达、相位法激光雷达三种。
三角法激光雷达主要应用三角测距原理工作,成本较低,多用于扫地机器人、服务机器人之上。也有少数车厂用此类激光雷达替代超声波雷达实现自动泊车。
TOF(Time Of Flight,飞行时间)激光雷达目前是主流,机械旋转式和固态激光雷达中的大多数都属于此列。它通过计算激光光源到被测物体的飞行时间来进行测距。这一技术方向中的单线激光雷达因为成本低,最有希望在汽车市场先行落地,用于辅助驾驶。
相位法激光雷达通过检测内外光路激光信号的相位差来测距,其精度可达毫米级。但难点在于单位时间内测量点数待提高,制作多线激光雷达难度较大。
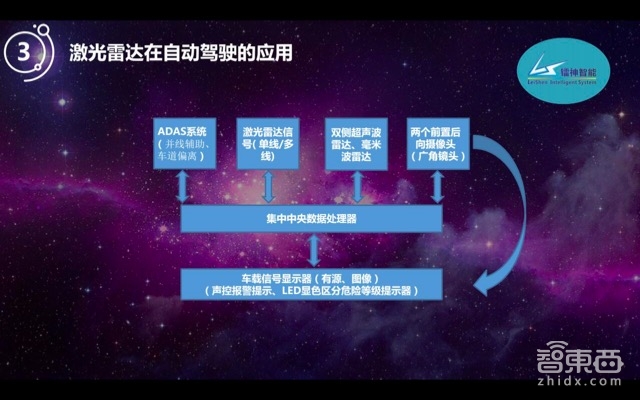
2、激光雷达在自动驾驶的应用
具体而言,在自动驾驶中,单线与多线激光雷达的应用略有不同,多线激光雷达可以和其他传感器融合,进行三维重建、对被测物体进行识别判断,完成无人驾驶(高等级自动驾驶)的环境感知;单线激光雷达可用于ADAS功能,辅助车辆尤其是大型货车实现前后向碰撞预警和盲区监测等功能,提高道路安全等级。
3、激光雷达面临的挑战及应对
激光雷达要应用于自动驾驶中,主要是难点在于:1、其工作情景无法满足所有需求;2、价格太高。
对于激光雷达功能短板(雾天难以工作、物体识别能力有限),可采用多传感器融合的方式解决,用摄像头的图像识别能力和毫米波雷达的全天候工作能力补足。
对激光雷达大规模应用形成最大阻碍的价格问题,目前有两个主要解决途径:
一是在机械旋转式激光雷达的产品中,实现电子元器件的高度集成化与芯片化,因此自研激光雷达ASIC芯片是一条可行的道路。
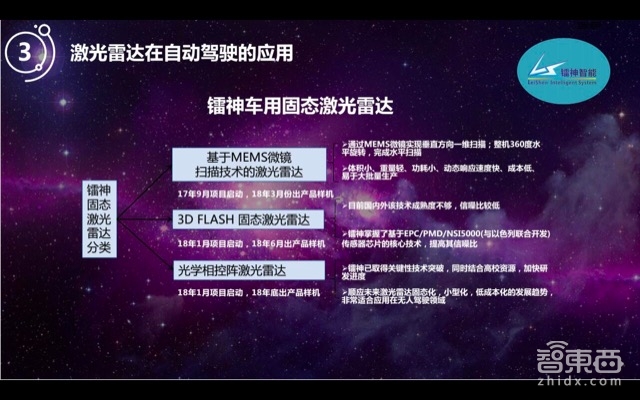
二是研发固态激光雷达——它们分为MEMS激光雷达、3D Flash激光雷达、光学相控阵激光雷达。
其中MEMS激光雷达为了测量距离与人眼安全,会应用1.5微米波长的光纤激光器。而3D Flash激光雷达通过与国外先进技术合作,可以在分辨率与价格上取得很好的平衡。分辨率达到640X480的同时,最终成本有望控制在200美金以内。它可能会是固态激光雷达中最好的一个方向。而相控阵激光雷达的难度与资金风险较大,需要国家做一些研究扶持。
主讲实录
胡小波:很荣幸今天晚上能跟大家在这里相聚,一起来探讨激光雷达在无人驾驶和辅助驾驶里的应用以及行业发展趋势。

1、激光雷达常用技术原理
先跟大家简单介绍一下几种常用激光雷达的技术原理,常用的激光雷达有3种:三角法激光雷达、TOF系列激光雷达和相位法激光雷达。
三角法激光雷达

三角法激光雷达原理比较简单,激光发出去之后,通过光学系统检测发射点打到物体上的光斑在CCD或者CMOS上面成像点,利用相似三角形原理来反推距离。
三角法的主要应用跟汽车没有太多关系,目前主要用于扫地机器人、服务机器人等消费电子领域里面,但是现在我们也有一些车厂的客户,用固定角度(90°)的低成本三角法激光雷达(相当于固态激光雷达),取代超声波来实现自动泊车的功能。
TOF激光雷达

TOF(Time of flight)就是时间飞行法,实际上就是把半导体激光器调成纳秒级的光脉冲,光源发出去,打在目标上后,通过APD(雪崩光电二极管)检测返回来的光,再通过计算,把时间乘以光速除以二得到距离,然后再把半导体激光器旋转起来,加上编码盘中的角度信息,最后就得到扫描激光雷达,也就是我们说的单线多线!现在大部分说的都是TOF激光雷达。包括MEMS固态激光雷达、flash激光雷达以及相控阵激光雷达都属于TOF的基本原理。大家也比较清楚,就国外而言,德国西科和日本北洋等公司基本上垄断了单线激光雷达的市场,单线激光雷达主要用在AGV防撞和导航,以及服务机器人导航,当然在汽车辅助驾驶上面也有用。
我们基于单线的激光雷达,做了一款基于激光雷达和摄像头融合的汽车ADAS系统,并且可以识别很小很细微的物体,比如马路边上的栏杆以及给树加固支撑的钢条,据我们所知,在十米左右的地方2cm直径范围内的钢条,很多厂家的激光雷达是测不出来的,也包括国外的很多厂家,但是我们就可以很清楚的识别出来,当然可能是由于各家采用的的技术方案不一样。对于我们来说,是希望能够尽可能地在无人驾驶到来之前通过很低的成本和售价,能够让单线的激光雷达尽可能快并批量的用到车上,所以单线在100米到150米范围内的激光雷达。我们以后在汽车上面的批量售价,应该是在1000-1500元人民币之间。
这样就能让所有的车都用得起,其实特斯拉的自动驾驶就是用毫米波和超声波视觉来实现的,其实他们在自动驾驶功能方面已经做的很好了,但还是会出事。其中最重要一个原因,我想就是因为他们没有装激光雷达。过去在国外,单线的激光雷达价格也非常贵,sick的单线激光雷达,一台一百米距离的激光雷达,差不多也要五六万块钱,所以他们想装也装不起。
我们开发的基于单线激光雷达和摄像头多传感器融合的ADAS系统,通过激光雷达得到的点云阵列结合摄像头获取的数据,来做车道线的识别、车的识别以及车道偏离预警,同时可以把车的距离很精准地测出来。这样,其他车厂可以根据我们开发的ADAS系统,去做一个比较简单的毫米级的数据对比。
我们开发的基于激光雷达和视觉融合的辅助驾驶系统,测出来车道线的偏离可以给出曲率数据。另外,车的距离也可以很精准地显示出来,这个数据可能比较简单,因为很多数据对于目前车厂来说,如果让他们去处理数据量这么大的相关点云数据,包括信号的传输都是很难实现的。通过这样的处理之后,实际上我们可以把这些数据进行大大的简化,相当于进行了分布式处理,在处理完数据之后,可以直接通过can总线发到中央控制器,然后车厂在这里就可以做一个很好的决策。
相位法激光雷达
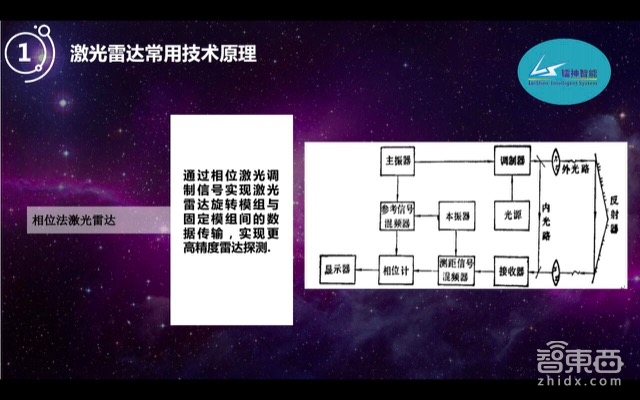
这张图片讲的是相位法激光雷达的基本原理,相位法实际上是通过对激光器进行调制,把内光路和外光路结合起来,然后把两个激光器的信号通过接触器进行混频,得到混频的信号后监测相位差,具体的操作过程可能会比较复杂,里面会用到好几把尺子,用来鉴别相位的偏移量。相位法激光雷达,其精度可以达到毫米级,它的难点在于如何把单位时间里测量的点数提高。我们已经突破了这个技术难关,基本样机已经做出来了,相位法的成本也可以做的比较低,但是我认为做单线激光雷达会比较好,如果是做多线的,并不是很好做,但是对于三维扫描测量,相位法是可以做的。
2、自动驾驶在感知层面的挑战

对于自动驾驶,我认为要多传感器相互融合才能把感知工作做到位。因为每一种传感器都有自己的优势和劣势。把所有的压力都放在任意一种单个的传感器上,都是不靠谱的,也是不现实的。如果是线数很多的激光雷达当然可以嵌入,多线激光雷达基本上可以把自动驾驶需要的感知都实现了,但是它的成本会非常高。Velodyne的16线激光雷达售价是8000美元以上,而且价格不知道什么时候能降下来,32线和64线的激光雷达更贵,基本上是8万美金左右,现在还没有听说有降价的趋势。而且传感器的体积太大,就64线而言,需要放在车顶,而且车顶上顶着那么大的一个东西,会有一些弊端,一是风的阻力会很大;另外外观会比较难看,所以我们认为雷达本身的体积要做小,这是一方面;另一方面就是成本一定要降低,大家才能用得起来。16线的激光雷达成本,我相信以后会降下来。当然单线的激光雷达是可以把成本做到很低的。
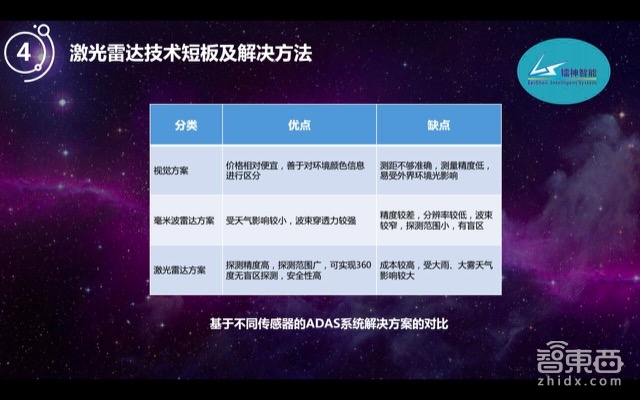
我个人认为无人驾驶至少还有5-10年的发展历程。在这个过程中,摄像头肯定会变得越来越聪明,而且它能够实现的功能肯定也会越来越强大。当然,摄像头也有一些弱点,比如夜间工作会受影响,下雨天以及有大雾时都会受影响。而激光雷达在雨天,影响不会太大,我们做过测试,基本上还可以,但距离会受一些影响,另外可能会有一些噪点。而雾对激光雷达影响会比较大,但是它的优势是远距离探测能力比较强,角度分配率高,可以辨别出很多的细节,另外在晚上工作它也不受影响,白天工作且在强光下受的影响也不是太大。
如果激光雷达线数比较多,其成像就会比较清楚,但是它最大的问题就是价格太贵。如果没有原理性的一些突破,那么16线以上的激光雷达,成本肯定都会比较高。毫米波目前成本比较低,但毫米波弱点是其波束比较宽,对物体的角度分辩率很差,一些细节是分辨不出来的。而它的优点是受天气影响比较小,不受雨雾影响,同时晚上也可以正常工作。

我认为影响激光雷达在车上应用最大的因素就是价格。有报道说特斯拉也有车顶着Velodyne的激光雷达在做测试,说明他们也认识到单靠摄像头和毫米波雷达可能不是最终的解决方案,还是需要加上激光雷达。但是激光雷达最大的问题就是成本太高,怎样把激光雷达的成本降下来呢,可能是我们这些做激光雷达的厂家以后要重点去做的事情了。
当然镭神智能为了降低激光雷达的成本,也做了很多工作,比如我们搭建了专用的芯片设计团队,自行设计激光雷达里面专用的集成电路,我们第一款芯片已经在6月6号去流片了,预计在9月底会做出来,现在在做封装,国庆之后我们就可以拿到芯片来做测试了。
3、激光雷达在自动驾驶的应用

激光雷达ASIC芯片
因为激光雷达是需要很多路的,如果每一路都用单片的方式去做,那就需要单个的跨组放大和后面的高频运放,然后通过集成运放进行放大,但是我们目前做的芯片可以通过一个芯片,把这些东西全部集成进去,这样成本就可以做得很低;另外,我们一个芯片可以做成很多路,比如我们已经在测试的64路和16路的芯片,不仅能够将它的体积降下来,性能也得到提升,同时成本也可以大幅度下降,所以这个是我们镭神在这方面跑在其他公司前面的一个地方。

这张图片就是我们自己设计的一些芯片,这只是第一款,在未来我们可能还会有四五款专用的激光雷达芯片,同时我们也会陆陆续续研发出来,为此我们也搭建了一个很强的芯片设计团队。
远距离激光雷达

上图展示的是我们目前正在研发的远距离激光雷达,大概500米到1.5公里,当然一般的车是用不到这么远的,通过了解,我们认为重型卡车,需要300米以上的测量距离,因为卡车惯性比较大,所以刹车距离会比较远,在这方面我们是有核心的优势的,因为对于这么远的距离,激光雷达要想做好,必须得用光纤激光器做光源,可能有的朋友比较清楚,我可以算是国内最大的光纤激光器厂家的创始人,所以我们的激光器做出来成本会很低,这款激光雷达在未来的成本也不会太高,应该是可以给车上用的。
固态激光雷达
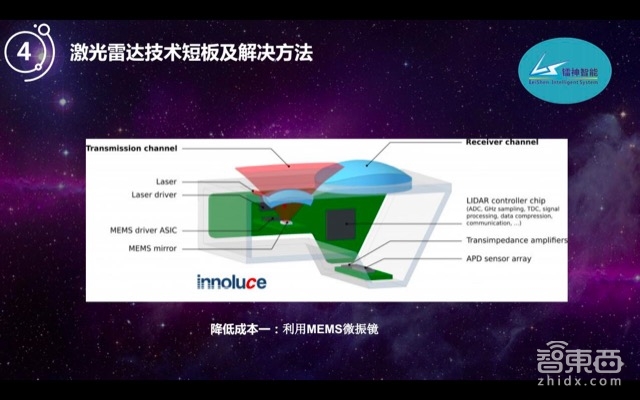
这张图是我们正在做的几种固态激光雷达的研发规划,MEMS扫描激光雷达,也是同样的道理,要用MEMS扫描激光雷达,肯定得用光纤激光器做光源,如果用905纳米的半导激光器做光源,是很难实现的,因为目前905的管子,它的重频是做不高的,如果重频高,平均功率就会过大,对激光管的寿命会有影响,但是光纤激光器不存在这个问题,特别是1.5微米的,它对人眼安全也有保障。
激光器的重频可以做到很高,通过MEMS扫描之后可以把每秒的增率做上去,另外每一帧激光脉冲的点数(即像素)也是可以做上去的。它的距离是可以测得很远,因为激光器的功率可以做得很大,而且即使这个光纤激光器在功率很大的情况下,它对人眼也不会存在危害,因为1.5微米波段是人眼安全的波段,我们目前也正在研发。
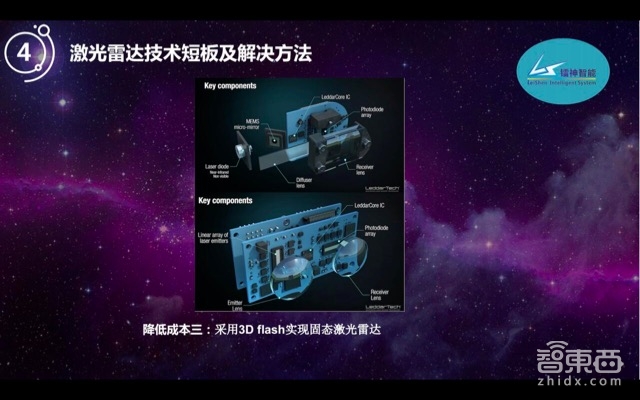
另外一款就是3D FLASH固态激光雷达,对于固态激光雷达,我个人认为,以色列一个做芯片的公司在ITOF芯片技术,即感光的技术领域里,无论在国内,还是在全世界,我相信都是做得最好的。我们就是用以色列这家公司的芯片去实现三角法的激光雷达,然后发现以色列的芯片技术真的非常厉害,感光灵敏度相比原来我们用美国厂家的产品可以提高十倍。另外我们目前的这个线阵CMOS芯片,它在第一款芯片的时候就已经涉及到ITOF的验证功能,所以我们今年下半年已经开始在跟以色列那边一起去验证ITOF的功能,预计到明年3月份,第一款真正的固态640*480像素的FLASH芯片就会出来,我们计划是到6月份把样机做出来,明年年底定型。

相控阵激光雷达,我们觉得这个坑可能会比较大,当然我们也有跟国内的一些高校合作在研发这一块,跟他们一起在做一些前期探索性的研发工作。对相控阵的态度,我们是觉得不用那么急着下判断,另外就是这块需要投入的资金量可能太大,可以让国家做一些基础的研究,也不是我们初创的公司能够去承担的一个成本,风险也太大,因此对于这块,我们可能不会作为重点的研究方向。
这张图片展示的是我们跟以色列一起研发的固态激光雷达的基本原理,也就是ITOF的原理。ITOF是渐进式的TOF。这种雷达做出来之后,距离应该可以支持0.3-200米的探测范围,640*480的像素可以说是非常高的,而且成本会非常低,我们预估成本应该在150美金到200美金之间,如果大批量生产不会超过150美金,我认为这应该是固态激光雷达最好的一个方案。
环境感知

对于多线激光雷达,我们目前在做的就是用多线的激光雷达和摄像头进行融合,对道路环境进行重构,即三维立体的重构;还有就是结合多线的激光雷达跟摄像头对车、人或者其他一些物体做更精准 的判断。
ADAS

刚才那几张图片是对激光雷达在自动驾驶和辅助驾驶里所起作用的简单介绍,因为我们本身只是做激光雷达这一块,最想做的还是硬件方面的东西,在软件算法这一块,我们有一个将近30人的团队在做这方面的事情,但是对我本人来讲,对软件算法并不擅长,所以我说的可能也不是很清楚,因此这块我就简单的过一下。我想在这里跟大家强调的是多线激光雷达的成本还没有降下来,我认为可以把单线激光雷达尽可能往车上先用起来,可以做前向防碰撞和周围的盲区检测,以及后向的防撞或者自动泊车等,这些功能都是很好的应用,而且单线激光雷达成本很低。
今年7月份,北京有一个关于汽车安全的研讨会,我相信群里很多的朋友都去听了,后面他们有给我反馈一个信息,主要是关于现在很多车出事故,比如侧面碰撞,特别是大货车或者大客车这样的大型车辆,出现侧面碰撞的比例大概占了40%多,前向碰撞占8%点多,后向碰上占70%多,还有20%多是由于车拐弯时属于盲区,检测不到,可能会把人、自行车、摩托车卷到车轮子底下,每年丧命于此的大概有十几万人。

实际上只要把成本并不高的单线激光雷达装上去,应该可以减少80%以上的事故几率,所以我认为如果谁把这个事做了,应该是一个功德无量的事情,因为每年可以救下十几万人的命,而且无人驾驶的发展没那么快,在发展没那么快的情况下,难道我们这些从业人员就什么事都不做了吗?如果真正的无人驾驶要6-8年之后才出现,难道从现在开始到6-8年之间每年十几万人都束手无策吗?明明有很好的一些解决办法,但就是不去执行,我觉得这对我来讲是不可原谅的。这是我个人的一点看法,可能不对,但是我们会想办法向业界去推动这个概念。目前一些车厂也开始接受我们这些想法,已经开始在测试我们的单线激光雷达。而且从测试的结果来看,效果还是挺好的。
4、激光雷达技术短板及解决方案

最后再跟大家讲一下,激光雷达也不是万能的,也需要跟其他的传感器进行结合,才能做到更好的应用以及更少的出错几率。对镭神来讲,我觉得我们的使命很简单,就是把激光雷达做便宜、做可靠、做稳定并把性能做好,让所有的汽车,不管是大车、小车、卡车还是客车都可以用上激光雷达,让车祸发生几率减少。不管是ADAS系统、辅助驾驶还是无人驾驶,哪个可以先用起来就先用上去,我们就会往这个方向去推广我们的激光雷达方案。镭神的目标是让机器更智能,让驾驶更安全,让生活更美好。我们会尽可能把单线激光雷达的成本售价做低,最低到一千块钱左右,对于多线的,比如16线的,在我们大批的量产之后,以后有机会我相信可以做到5000块钱左右的售价,当然是在很大批量的情况下。
之所以我会成立镭神去做激光雷达,是因为我在2015年春节之前出了车祸,当时捡了一条命回来,所以才选择去做激光雷达,此后我的一个理想是:未来要让激光雷达用在每一台车上,让这些车更好、更安全地驾驶。谢谢大家。
问答实录
提问一
李毅隆–深圳布谷鸟科技–算法工程师
1、你们的激光雷达的激光光源用的是多少纳米(nm)的或者是在什么范围内的激光?为什么这么选择,出于什么原因?
2、目前在技术上,激光雷达要做到长距离与宽视野存在哪些技术挑战?如果想把体积做的更小的话,有哪些现实难度?
3、点云算法也是自己开发吗?可否介绍下你们算法的一些技术优势?
胡小波:
1、选用多少纳米的激光光源是根据不同的技术方案选用的。我们的车用激光雷达基本上和大家一样,都是采用905纳米,一方面原因可能是905纳米的( )比较好,另一方面主要是因为器械比较成熟。而在MEMS固态的激光雷达上,我们基本上会选用1.5微米的光纤激光器,因为对人眼来说比较安全,功率也比较大,可以测得很远,曝出的质量好。
2、在长距离方面,首先发射功率需要尽量增大,提高接收端的电路灵敏度,这样才能测得远,但是我们也不可能无限制的提高功率和灵敏度,毕竟这些都是有限制的。至于宽视野方面,挑战可能在于光学系统的方案设计,需要一些比较特殊的设计,目前每一家公司在方案上都有自己的办法,也没办法说得更具体。而将体积做得更小肯定也是有难度的。我们目前也在尝试把体积做小,最主要的就是我们自己开发的核心的、专用的激光雷达S口芯片。
3、点云算法当然是我们自己开发的。我们有一个比较强的、将近30人的算法团队,已经将单线激光雷达、点云数据处理以及与摄像头的融合做得非常好了。而我们目前也正在做多线激光雷达的融合算法,相信很快也会做出来的。
提问二
冯国安 迈测科技 激光雷达软件工程师
请问当激光遇到过不同反面时,低反射率 高反射率 甚至镜面反射时,激光系统怎么做出快速有效的反应?
胡小波:
这是一个很具体的问题。在激光雷达领域也是一个很难处理的事情。每家的设计方案不一样,而要解决这个问题肯定要综合各方面的因素,包括光学系统和电路的设计,算法、激光点云等各方面的因素都要考虑进去。因为牵涉到核心技术以及公司机密问题,就不再做更深入的回答。
提问三
张伟伟 深圳中科龙智 总经理
1、多线雷达什么时候能有样品?
2、千元之内的激光雷达有机会实现么?如果有,时间大概要多久?
胡小波:
1、实际上我们公司的多线激光雷达已经开始在接单了。今年11、12月份就会开始给客户发货,而样品也要到时候才有,快的话十月底也有可能发货。
2、千元以内的激光雷达肯定有机会实现,这是没有任何疑问的。关键要看需求量,如果需求量上去了,千元以内的激光雷达很快就会实现。目前需求量达不到的主要原因其实很简单,目前机器人应用或者工业自动化应用对激光雷达的需求量达不到汽车的需求量,而扫地机的行驶距离基本上是很近的,不算在汽车内。关键还是看市场,包括前装和后装,至于什么时候能启动起来。具体的时间我也很难判断。
提问四
李毅隆 深圳布谷鸟科技 算法工程师
1、激光雷达的产能现在该怎么提上来?现在你们的产能能达到多少?成本方面的问题你们是如何解决的?
2、如果做市场的话,你们的产品跟Quanergy以及Velodyne这样的公司竞争,有哪些自己的优势?
胡小波:
1、关于激光雷达产能,比如我们的单线激光雷达,在产品定型的时候,我们基本上已经建好了单线激光雷达的自动化产线,所以产能不是问题。关键是需求的问题,如果需求量上来了我们产能也可以跟上。实际上我们自己设计的产线一天基本上可以做50台,而一条几万块的产线的成本不是太高,搭一百条产线,也就是几百万的成本。关键是需求量可能不会上升得这么快。因为激光雷达在车载方面还没有真正地用起来,而扫地机又用不了这么高端的激光雷达,所以我认为需求量要达到几十万,甚至上百万台会比较费时间的。而多线激光雷达其实除了调试更费劲一些,整体与单线激光雷达差不多,我们可以通过优化工艺和产线自动化来实现量产。
成本方面,我们有自己的一些解决办法。我刚才已经说了最主要一个办法,我们会在核心的、专用的ASIC芯片上花很大的力气,做好这个之后,我们的体积可以缩小,性能可以提升,成本就可以大幅度下降,所以成本不会有什么问题。
2,Quanergy和Velodyne分别代表了两种技术路线。Quanergy宣传的是相控阵,但是我不知道国内有哪一家公司拿到了他的相控阵激光雷达并做了适用,所以我们不做评价。目前在多线激光雷达公司里面,Velodyne应该是技术最好且产量最大的。但是有句话,中国是发达国家的粉碎机。这么多中国公司开始做雷达,而且每个公司也融了不少钱,我相信会给他们一个意外惊喜。就像原来我们做脉冲的光纤激光器,我们从10年开始做到14年,就做到了国内老大,基本上占了国内百分之六七十的市场份额。不过因为在技术、市场等整体实力上的差距,在刚开始做的时候,一些人会感觉到绝望,但我觉得这些都不是问题。只要一步一步的去做,凭着中国人的智慧和苦干巧干的精神,再加上我们的方向和战略布局,我相信是有机会赶超国外的公司。在这一点上,我是充满自信的。
提问五
石朗晶–百度–地图产品经理
我想请问下: 激光雷达的测量范围有限并且成本昂贵,作为感知模块纯摄像头的方案未来是否能够替代激光雷达的功能?或者二者谁更为主要,多少线的雷达能够完全满足自动驾驶的需求?怎么组合会使得自动驾驶方案更安全经济。
胡小波:我还是坚持我的观点,首先我相信激光雷达测量范围比摄像头更远,成本其实不是问题,特别是镭神智做了之后,成本更不是问题。最后我认为激光雷达、摄像头和毫米波,甚至包括超声波,不是谁取代谁,而是相互补充的。自动驾驶是一个人命关天的事情,车速开到百公里以上,如果哪个传感器出了问题或者没有冗余的话,这是一个不可想象的事情。
关于多少线的激光雷达能够完全满足自动驾驶的需求,我认为自动驾驶以后要尽可能多地发挥摄像头的作用。我刚才也提了一个看法,真正自动驾驶可能还要五到十年的时间。在这几年的时间里面,人工智能发展得这么迅猛,我相信深度学习等各方面的发展会让摄像头变得更加智能,自动化程度更高。实际上特斯拉原来没有使用激光雷达,只用了摄像头跟毫米波雷达也做到了汽车的半自动驾驶。如果再加上多线的激光雷达,我认为线数不一定需要很多,4线、8线或者16线可能就够了。有些人认为可能要64线,甚至128线,才能满足自动驾驶的要求,但是我认为这样成本会极高,线数高到这样的程度,很难把成本降下来。
如果固态出来之后,是有可能把成本降下来的,但我相信固态激光雷发肯定也会有其自身的问题。另一方面而言,机械旋转就没用吗?我一贯认为固态不一定能够取代360°机械旋转激光雷达,而机械旋转一定不可靠是一个荒谬的观点。一部汽车里面有多少个旋转的部件?大家可以去统计一下汽车里有多少个小发电机,这些都是旋转的,而且是高速旋转的,难道他们一转就不可靠了吗?我不这么认为,我一直坚持机械旋转作为目前最成熟、最可靠的方案到后面还会持续用下去。面阵的也好,MEMS激光雷达也好,相控阵激光雷达也好,我相信后面肯定也会有各种各样的应用和应用组合。我并不认为固态激光雷达或者号称固态激光雷达能够完全取代机械旋转式激光雷达,其实我关注更多的是机械式激光雷达成本能不能尽快降下来,尽快地占领市场,我认为这才是最关键的。
提问六
闵瑞 北汽 重点运动控制与系统集成工程师
什么途径可以使激光雷达大批量量产并降低成本?可以真正意义上在ADAS系统中应用?
胡小波:
其实刚才在我的介绍里面已经回答了。需要从好几个方面进行努力,首先最重要的是得有足够大的用量;第二是方案设计要考虑如何降低真正的大批量生产的的物料成本、调试测试成本、生产成本和人工成本;第三是尽可能将激光雷达生产过程中的步骤变成自动化,而不是通过产量较低、成本较高的人工方式;第四个是自主研发芯片,因为从国外芯片厂家购入专用的芯片的成本很高,特别是量产的时候。
提问七
李扬 程度配天智能技术有限公司 总经理
制约激光雷达成本的是ADC吗?64线雷达的ADC釆样频率需要多少呢?
胡小波:
ADC是制约激光雷达成本的一个方面,而64线雷达的ADC釆样频率不好泛泛而论,需要考虑到每一家公司的算法、信号处理水平,所需要的采样频率也不同,并且光源发射也是相关的。我们目前用的是国外的ADC,但是我们自己做的ADC也很快会出来。
提问八
陆海峰 上海戴世智能 惯性导航和高精度定位
希望主讲人点评一下国内外,现在几个比较火热的激光雷达生产公司的技术水平的差距,或者是技术的不同点。
胡小波:
再简单阐述一下我的观点。我的观点不一定正确,大家可以批评指正。目前做得最好的是Velodyne,Velodyne在机械旋转雷达方面的方案做得最成熟最可靠。国内的许多公司都有借鉴Velodyne,但也有自我的特点。有些公司借鉴出了自己的特色,但也有些厂家急于做出产品,不在乎品质,比如使用电滑环的那家公司。
国外做固态激光雷达的也有数家公司,但并没有看到实际产品。和机械旋转的机械振动一样,固态的镜片其实也是会动的。其实不管什么技术,只要过了车规的冲击振动要求就可以,通过车规才是核心。
另外美国有一家做相控阵雷达的公司,我没法对它做出太大的评价,仅仅可以提供一些信息给大家。2016年12月,美国的DARPA(美国国防高级研究计划局)和MIT(麻省理工学院)做出的相控阵雷达的测量距离是1.5米,而这家公司的测量距离是150米。另一方面,这家公司一直对外声称要量产相控阵雷达,但是我不知道它是否已经量产,也没有听说国内有哪家车厂拿到了他的相控阵雷达。我们公司也在做相控阵雷达的预演,发现了许多技术问题,美国的半导体基础可能比较好,能够解决一些问题,但是我认为相控阵雷达应该远未达到成熟的阶段。各家厂商技术方案都不一样,但我认为最重要的还是性价比,第一是产品性能是否符合车规要求;第二是价格能否降下来,如果性能不达标,价格降不下来,到最后都会是一地鸡毛。
提问九
邓警 长沙市交警支队 大数据分析方向
自动驾驶给未来交通管理带来的影响,以及交通效率优化应该采用什么样的路径?
胡小波:
这个问题有点大,我有点不知道怎么回答。但我认为自动驾驶一定会减轻交警的工作量,同时通过更智能化的算法会降低出车祸的几率,使交通系统运转得更加顺畅,而自动驾驶什么时候能够实现还不能定论。
还有一个福利
我们的「自动驾驶」社群全面开放申请啦。诚邀你加入,将能认识到来自谷歌Waymo、上汽、北汽、一汽、百度、博世、大陆、蔚来汽车、NVIDIA、Mobileye、智行者、图森、高德等整车厂和供应商的上万名汽车工程师和从业者。
同时,我们会定期邀请自动驾驶方向和新能源汽车领域的知名创业者和技术大牛,主讲自动驾驶系列课。如果对自动驾驶有强烈兴趣,可以添加车小东微信(ID:cdxauto)申请入群交流。



