







导语:汽车产业经历剧变,自动驾驶浪潮来袭。是被浪潮吞没,还是屹立于浪潮之巅?如何摘得“人工智能项目之母”桂冠,用智能代替双手掌控车辆?从9月14日起,智东西重磅推出9堂自动驾驶系列课。9位实战派导师将为大家奉献超过810分钟的系统讲解和深度互动,完成对 33个知识点的专业拆解,和你一起建立未来汽车的知识壁垒。
在车东西公众号(ID:chedongxi)对话框回复“自动驾驶”,获取系列课音频、资料下载。
第8课由图森未来CEO陈默主讲,主题为《无人驾驶低成本的方案以及如何商业化》。下面划重点!
要点速览
一、图森认为,L4 级别的无人驾驶是未来的方向,L3级别的辅助驾驶并不能减少人,图森的无人驾驶卡车是L4级别。

(图森的无人驾驶卡车)
二、做无人驾驶车辆目前有两种方案:
一种是以视觉为主的方案,例如Tesla,一种是以激光雷达为主的方案,例如Google。
这两种方案的无人车均需要传感器、线控系统和计算单元。目前能满足无人驾驶使用的激光雷达只有机械激光雷达,机械激光雷达成本太高,无法实现商用。
三、如何打造低成本的自动驾驶卡车?采用以视觉为主的方案,辅助以毫米波雷达、IMU等低价传感器。
四、不选用64线激光雷达的原因:
1、可靠性和使用寿命都有待提升
2、不满足车规。
3、探测距离不够,无法满足货车的刹行距离,不适合货车使用。
4、成本太高。
五、图森的传感器方案:
1、10个摄像头。
2、3组毫米波雷达。
3、1组四线固态激光雷达。
4、通过多传感器融合来进行感知与定位。
六、L4级无人驾驶商业化的机会在技术运营,原因如下:
1、自动驾驶技术需要有人负责,但是产业链上玩家都不愿意。
2、技术不成熟的时候,不可能直接卖给消费者。
3、强于制造的公司不愿意去做出行运营服务。
因此图森要通过做技术运营商来实现商业化。
主讲环节
陈默:大家好,我是图森未来科技有限公司的陈默,非常感谢智东西提供机会让我给大家做一个分享。关于今天的分享,我看到有不少非常好的问题,我希望今天讲的时间短一点,这样回答大家问题的时间能长一点。
今天的主题是无人驾驶低成本的方案以及如何商业化。
今天的主题有个前提。无人驾驶分了从L1到L5五个级别,而我们认为真正的分开点在于L3和L4级别之间,我们认为任何去辅助人类驾驶,由人类去承担责任的方式是辅助驾驶,也就是现在的L1级别到L3级别。而L4级别和L5级别是由机器决策,并由机器来负驾驶责任的驾驶方式,我们则认为是无人驾驶。
今天想分享的是在L4级别下,我们怎样用低成本的方案去完成商业化服务?无人驾驶的商业化是要代替人类司机开车。低成本的商业化方案有两点要讲,一是低成本,二是商业化。我们先说商业化,实际上在L4级别以上的无人驾驶是针对于不同场景去替代司机的,从替代司机的效益中算出我们节省的金额,并作为未来的收入进行记录,这是我们谈到商业化。做到低成本是挺简单的事情,但如果用的机械激光雷达都是64线,成本就一定下不来,而其实目前我们都不需要用这么贵的传感器来完成L4级别的无人驾驶。
我们图森是专注于L4级别的卡车货运,以后也会做无人卡车的承运业务。我们想要省掉司机的成本,完全由机器替代司机做驾驶的行为和决策,以此来降低成本和提高效率。
一、如何打造低成本的自动驾驶卡车?
1、使用低级别传感器来降低成本
无人卡车的主要成本在于传感器,车辆电控系统等。电控系统的成本会贵一些,整套电控系统在国内可能要7到10万人民币,但是对于代替司机的无人车来讲,7万到10万是可接受的范围。
另外两块是传感器和计算单元,这两块目前有两个技术路线。传统的机械激光雷达是谷歌有优势的技术路线,但激光雷达目前成本太高了,降不下来,并且还有其他问题。激光雷达的可靠性和耐久度都是问题,基本的耐久度不会超过5000个小时,这样在产品化中会带来很大的问题,例如过不了车规,测距距离较短等。
我们在开发一套系统时,首先是要了解系统的工况是什么,以及我们要去解决什么问题。我们是一家做无人卡车承运公司,道路选择基本是物流运输的干线,一般是从一个公路港到另一个公路港。工况基本就是从物流中心出去后会有一段的郊区道路,接着就上高速,下了高速以后又会是一段郊区道路,往后就进入下一个物流节点。而物流中心一般不会离高速公路太远,否则就不经济,所以绝大部分的工况就是高速公路。
在这样的工况下,我们能不能使用更便宜的传感器?64线激光雷达是必要的吗?能不能不用64线激光雷达?
针对这样的工况,我们认为64线激光雷达并不是最合适的。
主要有下面的原因:首先,我们选了货运行业,就是因为我们希望可以更快地商业化和产品化。由于激光雷达的机械结构,我们很担忧它的可靠性、防颠簸震动以及使用寿命,它过不了车规。
其次,探测距离不符合货车的实际情况。在技术上来讲,乘用车的刹车距离只需要40米,而重型的集装箱卡车在满载时刹车距离可能需要200米以上。64线激光雷达的标记距离一般是120米,而实际上在90米内会比较有效。如果我的刹车距离是200米,90米的标记距离是完全不够的。
最后还有成本问题,只有做到低成本,才能商业化。我们认为现在传感器的价格不能接受商业化,因为传感器本身比车还贵。
我们最后的方案是以计算机视觉为主,毫米波雷达和四线的固态激光雷达为辅助。这样一来控制成本,二来更合适高速公路为主的工况。这样的工况下,车需要看得远,

我们公司和物流公司合作,收集了很多数据,发现高速公路上最多的就是车,此外就是一些掉落的物品,种类不会很多。所以这种工况下,车辆实际上并不需要用到64线激光雷达,去探测太多无法通过计算机视觉辨别出来的物体。
另外,当我们的车承接其他的任务时,车上的四线固态激光雷达已经可以更好地去找到很多没有探测到的物体,比如城市里面常见的婴儿车、小狗、小猫,以及一些不规则的障碍物。在这种情况下,激光雷达是用一种更好的通用方法去解决问题。
2、低成本传感器方案如何保证安全
在这仅仅是传感器的对比,但在无人驾驶上的重点是安全性,尤其是在用低传感器(较低级传感器)方案的时候。我们怎么保证无人驾驶安全性?
我们卡车的传感器使用了10个摄像头、3组毫米波雷达和1组固态的四线激光雷达。刚才说到卡车需要的是看得远,为什么会装这么多摄像头?这是因为不同的摄像头的FOV(视场角)角度是不一样的,摄像头探测的距离不同。最长焦的摄像头可以探测到150米和250米的距离,,也装有中距摄像头和广角摄像头,通过摄像头FOV(视场角)的调整可以调整探测距离。毫米波雷达可以探测到最远200米的距离,毫米波雷达位置也是多角度的,可以探测到侧后方,以便用于超车使用。在这个基础上,我们还有四线激光雷达作为冗余,并且我们也一直在尝试用多算法融合去完成每一个任务。
无人驾驶这块基本上大家分五个部分:地图构建、物体感知、定位、路径规划以及车辆控制。我们使用激光雷达采集高精度地图,因为我们的货运的场景是限定的,所以采集任务简单得多,成本也低得多。
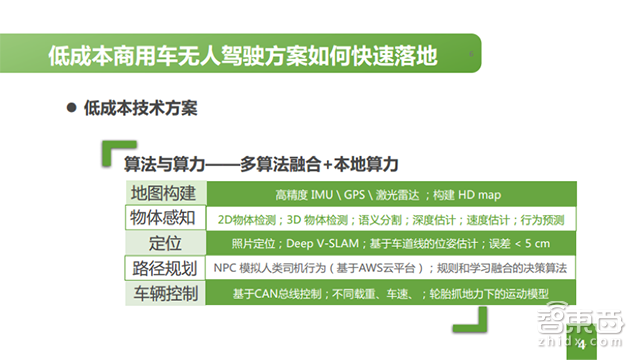
目前我们在国内跟图商合作来做高精度地图,而物体感知涉及到多传感器多算法的融合,我们使用多种不同的算法,对各种传感器信息进行计算,比如汽车驾驶时的2D物体检测,3D物体检测,可行驶路面检测,车道线的检测,通过双目摄像头进行的深度信息的检测等等,从而得出一个不同的信度。
在得知所有传感器的信度后,系统再计算得出一个综合的感知结果。也就是说我们并不相信任何单一的传感器或者算法,都是通过多传感器多算法的交叉验证来得到一个相对可靠的结果。
在这基础上,我们会再做保守决策,进一步降低车辆安全的隐患。比如现在天气不好,那么卡车就会等天气好了才进行货运,或者现在是夜间,汽车平常车速是100km/h,考虑传感器的性能会受光照的影响,汽车会开得慢一些,这样降低探测距离以及准确度的要求。我们通过保守决策去完成另一部分的安全保障工作。
所有行驶路线都是经过了虚拟环境的测试和实际路测。
我们会用多台的车辆,对每条路线做大量的实际路测,这也是我们明年的重要任务。这也就是说所有路线的情况都是先验的,诸如路上的每一个山洞,不同时间的光照信息,光会不会被遮挡,会不会光曝等等的情况都是先验的。我们认为所有没见过的东西都是不安全的,所以在处理过虚拟环境以及实测的所有问题后,我们才认为是安全的,而如果还碰到没有处理过问题,我们也会安全停车。
举个例子,我们在曹妃甸测试的时候碰到过问题。我们的车发现有条车道线因为重建或改造而被擦除了,这导致系统检测车道线异常,而这类问题我们都会通过人工修整。针对每一条路线,我们都会有数据导入以及实车的长距离验证。我们希望在路上见过99.9%的情况,这样系统就能够处理情况,而在情况外所遇见的事物都是个不安全的因素。

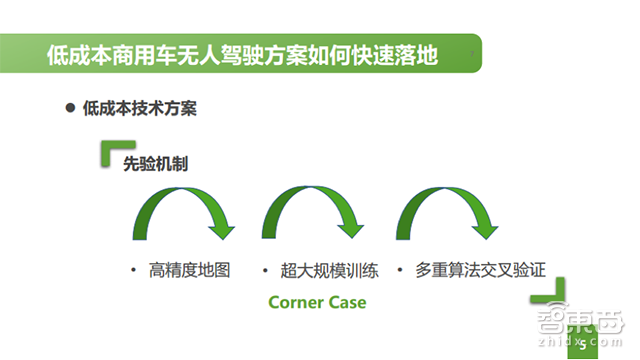
总的来说就是我们通过多算法多传感器的交叉验证,保守的决策机制以及先验机制这三点来保证整个系统的稳定性和安全性。
二、低成本的自动驾驶卡车如何商业化?
我们继续讲商业化,刚刚讲了怎么用低(级别)传感器方案基础上做到达标的可靠度,不过我们认为就算想要用激光雷达去达到一定高的可靠度,也是需要进行大量的测试,得到大量的数据。
无人驾驶的商业化实际上只有两种方式,一种是做出产品直接卖给消费者,或是将技术卖给Tier 1,由它做成产品去给OEM,由OEM卖给消费者。另外一种方向就是自己运营无人车,比如矿车市场的小松,驭势的低速摆渡车,谷歌要跟Lyft合作运营的无人出租车,以及我们的无人卡车。
在L4级别级别的无人驾驶的商业化有一个核心点,机器代替了司机做驾驶行为的决策,因此机器相应也要为这件事情负责任。
那么最后是谁来承担责任?我们认为做系统部件的Tier1,做整车组装的车厂,以及做出行服务的滴滴都不愿意承担,因此一定需要一个开发软件系统的技术运营商来承担责任。
因为运营商的软件替代了人类司机完成了驾车行为,它应该负这个责任。
并且,我们认为在目前技术比较早期的情况下,如果谷歌这样的公司都无法运营自己的无人车并保证安全,所以自动驾驶技术又怎能做成产品去交给客户。所以在早期的L4级别级别的无人驾驶市场一定是有运营商,这是我们看到的市场机会。
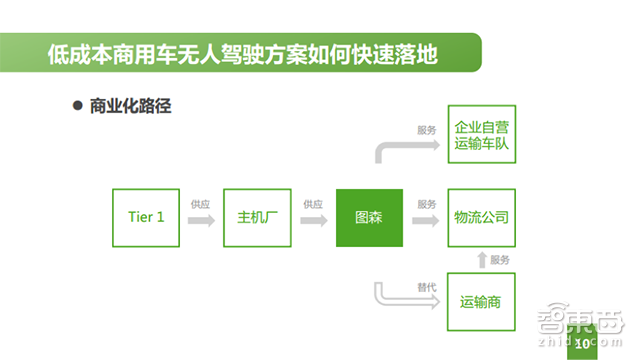
我们自身是不做硬件的,我们的硬件是跟OEM、Tier 1、英伟达等厂商一起合作,我们自身定位是无人车的软件提供商以及运营商,我们愿意承担运营的责任,去运营无人车。我们认为运营市场会更快,更有可能商业化。
我们认为硬件是一个很难的产业链节点,这是传统Tier 1和OEM的优势。在中国企业会更依靠于Tier 1,它有很强的技术能力,尤其是在硬件的整装和集成上。我们认为创业公司会依托于OEM和Tier 1的平台,但OEM和Tier 1也有不愿做的事,就像不能让善于做系统集成的博世做出租车运营。
所以在商业化的时候,我们也会选择去跟不同的角色以及上下游企业合作,我们认为这个市场非常大并且产业链非常长,一个公司很难去做到所有环节,谷歌现在也不研发自己的无人车了,而选择合作。
特斯拉是个特例,它的产业链布得比较长,它想开发自己的芯片,但是目前它也是在用英伟达的芯片,而传感器摄像头等等也都不是它自己做的,这也是跟别人合作,由供应商供应。
扯得比较远了。我们认为商业化需要的是实际场景,能够在场景上运营,降低成本,并且让所有硬件都是可以过车规,可以量产化。我们觉得这是其中商业化的几个条件。
问答环节
提问一
于洪达 北京绿驰汽车硬件工程师
低速自动驾驶能否不依靠激光雷达和RTK导航来实现?
陈默:您说的低速车的场景应该是指像京东小车的物流运输车或者驭势的摆渡车,它们行走的是固定,或者趋向于固定的路线,我认为是可以通过磁传感器的AGV机器人或者低线数的激光雷达完成无人驾驶。
低速无人车存在两个需求:循迹需求以及避障需求。
我们需要看具体的场景是怎样的。举个例子,比如小松,它做的是矿车,它是在一个封闭而没有其他交通交互的情况,完全可以只利用磁传感器而不使用避障,不需要使用激光雷达和定位。因为这区域里的东西全是你的,所有交互也都是跟自己的车辆或者AGV机器人进行的,所以是可以完全不依靠激光雷达和RTK。
但是如果是驭势做摆渡车的白云机场,这就有点不一样了。
为什么驭势用激光雷达?因为这个区域存在很多交通交互,因此需要驭势做感知。而目前能够感知的方法其实就只有毫米波雷达、激光雷达和计算机视觉,慢速而距离近的情况下,也可以包括超声波。
但是这些技术各有各的问题,激光雷达比较贵,毫米波雷达的分辨率比较差,计算机视觉对技术要求比较高,主控其实也不会太便宜,所以目前大家大多选用16线激光雷达,这是一种性价比比较平衡的方式,所以我认为在不同的工况下,我们应该选择更有性价比以及更合适的传感器、计算单元以及整体方案。
提问二
迟高明 奇点汽车ADAS高级经理
1、商用车自动驾驶化现在世界范围内各国的相应政策和法规是什么?
2、商用车自动化的社会效益和经济效益怎么评估?
陈默:政策和法规可以分两块来说,ADAS和L4级别以上的无人驾驶。
我认为ABS也是一种ADAS,关于ADAS的立法最先是欧洲,它强制要求商用运营车装ABS及ESP,咱们国家目前还没有,据说明年可能会强制要求安装ABS,甚至包括AEB和ESP。在辅助驾驶上,尤其是大型货车,驾驶确实比较危险。很难想象中国的小车基本都装备上ABS,而大车没有,我比较难理解这一点。相比小车,欧洲的法规对大车的强制性安装安全设备抓得更严。这是我们在ADAS市场看到的情况。
目前,L4级别的卡车在美国的几个州市内已经可以做路测,如内华达州,亚利桑那州、密歇根州、弗罗里达州。而在国内则是和地方政府合作去做试点,国内智能网联汽车的试行办法还没推出,我们其实也在密切地关注。
商务车的自动化分为辅助驾驶和无人驾驶。辅助驾驶的安全法规我个人是举双手赞成的,我们认为ABS、AEB和ESP,甚至安全带,一切保护措施在保护司机以及车上其他人上都是有帮助的,所以我们认为政府应该强制要求商用的大型车辆去安装。
提问三
王冠桥 兴业证券股份有限公司首席分析师
1、神经网络和传统视觉识别技术的差异;
2、图森的视觉技术如何与高精度地图配合,需要地图端具备哪些条件?
3、公司智能驾驶产品的研发和量产进度。
陈默:简单来讲,深度学习和传统视觉最大的区别在于传统视觉的特征点是由人来总结归纳,而深度学习是端到端,由数据来总结归纳的。这样有几个好处。通过人去总结归纳成本太高了,速度太慢了,并且人也没有像深度学习那么好的总结归纳的速度和能力,不能做出一套成本更低而又简单的系统。
我们的地图车上有十个摄像头,又有64线激光雷达,我们在一段路上会同时去做激光雷达的SLAM和计算机视觉的SLAM。我们用激光雷达的SLAM,为计算机视觉的SLAM点云做校准,当然,激光雷达可能会更准。
与此同事,我们的地图车上有4万美金的GPS、RTK和惯导,从而知道每个点的绝对位置,激光雷达也为视觉做了校准。但是在跑运营的车辆上我们不会装激光雷达,因为成本太高外,也还有一些其他原因。但是我们的运营车上会跑到视觉SLAM的结果,再由视觉SLAM的结果和在本地以前激光雷达校准过的结果去做对比,然后已达到定位的目的。
关于研发和进度,我们希望明年在中美各一条线路上会有一个300万英里的测试,我们希望明年可以完成安全性的测试,在19年开始进入商业化的试运行。
提问四
易晓峰 博泰–汽合资合作商务
您刚才说的保守的决策是指什么?
陈默:我举个保守决策的例子,比如车行驶在80km/h的时速,前面的车只有70km/h,系统认为车应该超过它,车应该是往左并线去超过前车。但是如果任意一个算法或者传感器告诉系统可能会有车,系统都不会去执行变线的动作,这就是保守的机制。
另外一点比如白天光照非常好的情况下,车辆认为在250米内的探测是准确的,车辆探测的正确率在晚上会下降,车就会降速。例如白天100km/h的行驶速度降到70km/h,因为我的速度变慢了,行驶需要的探测距离变短,刹车距离变短,而反应时间变长,这也是一种保守。
此外,车辆可以从右侧超车,但考虑安全而不允许从右侧超车,这也是一种保守。比较极端的例子就是前面的车辆太慢了,而我只是跟随而不去超车,我认为这是过于保守,但这也是一种保守。
提问五
章进鹏 大洋机械车身与结构件工程师
想问一下做高精度摄像头芯片的企业,进入汽车行业还有机会吗?该选择什么样的路径?
陈默:高精度的车载的摄像头,目前我们是和舜宇合作的。我们认为舜宇旗下维森是我们最好的合作伙伴,也是我们认为在摄像头模块的研发里能找到最好的合作伙伴。
我不确定你说到摄像头芯片是指什么,是指CMOS还是指感知芯片,比如Mobileye的EQ3,还是FPGA,我不确定你是说是哪一块。
而关于“进入汽车行业还有机会吗?”这个问题,我们认为衣食住行这四项需求是人的原始需求,汽车行业永远不会晚,我们可以看到从汽车行业的出来到现在已经是有一百多年。我们认为在未来这个行业不会消失。
提问六
李柯瑶 清科集团分析师
1、自动驾驶目前的商业落地有哪些呢?
2、中美发展现状有哪些差异?
3、如何应对政策风险?
陈默:我们认为辅助驾驶的法律未来会越来越严格,会强制要求安装AEB和ABS系列的安全辅助功能,我们认为安全辅助的功能是强制的。无人驾驶有四块运营市场:低速的电瓶车、摆渡车何物流车;矿机和农业;货运;出租车和乘用车。这四块市场基本上代表了目前无人驾驶的四块最大的应用市场,市场从小到大,难度也是从简单到难。
中美的发展现状有哪些差异?我个人认为美国现在快一些,企业的本身以及政府的态度都会更快一些,因此美国在0到1会比中国快,但是我相信我们国家从1到100定是比美国快的。
至于如何应对政策风险,说实在的,我不觉得无人驾驶这块会有特别大的政策风险。首先,这是一件利国利民的事情。国家或者任何一级政府要求保证可靠安全才能上路这一点是无可厚非的,我们研发时间都很长,并不是拿了商品就可以卖,或者拿了产品就可以运营,我认为是一个渐进的过程。国家不可能完全没有条件地允许一切,我认为这都是以一个点带一个面,逐渐去做试点,提供数据,论证安全性,继而开启业务。再者言,无人驾驶并不是像微信,大家一两年里在手机装上就结束了。无人驾驶是需要有服务能力的,谷歌有600工程师,服务无人出租车也是得一个城市一个城市来,所以我们不认为政策会去阻碍这项技术的发展,反倒这是一个相辅相成的过程。
提问七
王辉 上汽工程师 :
自动驾驶技术目前的技术难点主要在哪几个零件上?
商用车自动驾驶与乘用车相比,有哪些特殊的难点?
陈默:首先,我们公司不解决硬件问题,所有的硬件问题全是合作伙伴解决的,我们只解决软件问题。在我们看来,从芯片到执行器等,所有硬件全是问题。
在目前国内的工业期内能完全解决,也是因为全球采购的供应链。我认为任何一个硬件单体都是问题,所以我们不敢碰硬件。我们认为硬件是一件太困难的事情,所以现在我们的硬件都是合作伙伴在帮我们做,我们负责车辆的软件。
和乘用车不同,集装箱卡车是商用车。商用车比乘用车简单,它的运行环境下相对简单,唯一的难点在于车辆控制。因为集装箱卡车不是一个刚体,而是一个牵挂,它的载功变量大,满载和空载完全是两台车,下雨不下雨完全两台车。
给乘用车做自动驾驶,需要根据载重、回传的抓地力、本身的速度等数据算出它的运动模型,进而决策出平面行进线路以及渐进速度。随后,执行器所要的信号是一个方向平行角和油门刹车力度。怎么把决策还原成车辆控制的上层信号,这是一个比较难的模型,这点会比乘用车难的多,场景不同的时候,我认为还是在其他方面还是乘用车难很多。
提问八
张雪茹 86Research人工智能行业研究员
商用自动驾驶汽车是不是很快就能开始量产?明年会不会有一个爆发?
作为解决方案提供商在市场占有的份额大概是多少?
陈默:说实在的,我认为明年还不可以开始量产,明年可能只是产品化和量产的开始。想要看到产品,起码要等到2021年,至于这件事什么时候能做到,我们最乐观的预测是在2020年。我认为解决方案提供商目前还谈不上占多少的份额,因为解决方案还没有形成。
补充一点,我觉得网络上的媒体和民众太乐观了,而从业者却是最不乐观的人群。我们认为预测2020年或2021年实现L4级别的无人驾驶是很乐观的了,确保自动驾驶比人驾驶安全这件事情本身就是一件非常困难的事情,这并不是一个公司努力就可以达成,而是整个产业链一起解决的问题。
提问九
陈思宇–格陆博科技
如何识别卡车空载和满载情况?
陈默:可以使用载重传感器。做车辆控制的时候我们只需要知道自己车辆的载重,不需要得知其他车辆的载重。完全可以通过载重传感器来去得知自身的货重是多少的。
提问十
陈溯 西安交通大学检测技术与自动化装置
目前图像系统或雷达,识别小目标如何?比如小孩,比如狗。
陈默:现在的图像识别技术识别小孩和狗都是非常完美的。
但是一套系统要识别多少种物体是有限制的,识别的物体种类越多,你需要的算力就越大。因为这是一个在本地的即时性的系统,算力是有限的,到底要识别多少种种类的物体是个问题。顺便一说,目前车载最好的就是英伟达的Drive PX2。在同一套系统下,识别东西越多,那准确率也会下降。所以,对计算机视觉识别来讲,我们是希望识别的是最常见而且对我影响最大的物体,当中也包括人。
提问十一
庚文辉–码图–点云数据标注
训练和路测数据都是怎么获得的?
陈默:我们做了数据采集器,这跟在无人驾驶上的感知设备是一模一样的,但是它不连任何车辆控制,就只是一个感知系统。我们跟一些物流公司车队合作,把它装在车队的车上,记录车的行驶情况。随后我们都会去物流公司把这硬盘拿回来,这是一些数据。另外,地图数据,是我们自己的地图采集车去采集的,路测数据就是我们自己平时测试车辆往跑出来的数据。



