








4月20日起,智东西公开课推出自动驾驶系列课第二季,9位自动驾驶新势力的创始人和高管将带来9节系列课。
第二季第4课由中海达先进导航产品负责人余绪庆主讲,主题为《GNSS高精度定位技术在自动驾驶中发挥的作用与挑战》。本文为余绪庆的主讲实录,共计8900字,预计13分钟读完。一起了解下本次讲解的提纲:
1、当下GNSS定位技术的发展
2、GNSS高精度定位在自动驾驶中的作用
3、GNSS高精度定位在无人驾驶中面临的挑战
在浏览正文之前,可以先思考下下面几个问题:
-现阶段GNSS卫星服务系统包含哪几类以及多系统多频段定位的好处在哪?
-GNSS在高精地图制作中的作用是什么?
-高精度定位在自动驾驶领域中有哪些必要的因素?
-在自动驾驶领域中,RTK技术要克服的难点有哪些?
-中海达Hi-RPT全球定位服务如何提高在全球全疆域覆盖传输差分电文服务的稳定可靠性?
-未来如何量产百万级GNSS应用方案?
「提醒:如果希望下载自动驾驶第二季每堂课的完整课件,可以在车东西公众号(ID:chedongxi)回复关键词“系列课”获取。如果你希望成为主讲导师,可以回复关键词“导师”,进行申请」
主讲环节
余绪庆:大家好,很高兴在能在这里跟大家分享中海达对于GNSS技术在自动驾驶方面的一些理解,我是广州比逊电子科技有限公司的余绪庆,也是中海达器件底层核心技术的一家公司。
今天的演讲将分为以下三部分:
1、当下GNSS定位技术的发展状况;
2、GNSS高精度定位在自动驾驶中的作用;
3、GNSS高精度技术在无人驾驶中面临的挑战。

从上图大家可以直观地了解到,当下GNSS定位技术包含了多套卫星导航定位技术结合在一起的总的定位技术。以前我们知道的定位技术更多是GPS,随着各个国家和区域的发展,出现了GALILEO、BDS以及俄罗斯的GLONASS等多套系统共同在地球上运行提供导航服务,我们把主要导航或者辅助导航的定位系统统称为GNSS技术。
目前在国内用的最多的是GPS+北斗+GLONASS三套卫星导航系统,在国内,由于北斗的卫星数比较多,所以能够非常容易地接收到北斗信号,这样三套系统的运行非常好地解决了定位问题。根据各个导航系统的发展规划,到2020年,各个导航系统的卫星数都会发射到满足的状态。上图展示了未来各个系统最终发射的卫星数量,可以看出未来空中将会有非常多的卫星来为我们提供导航定位服务。
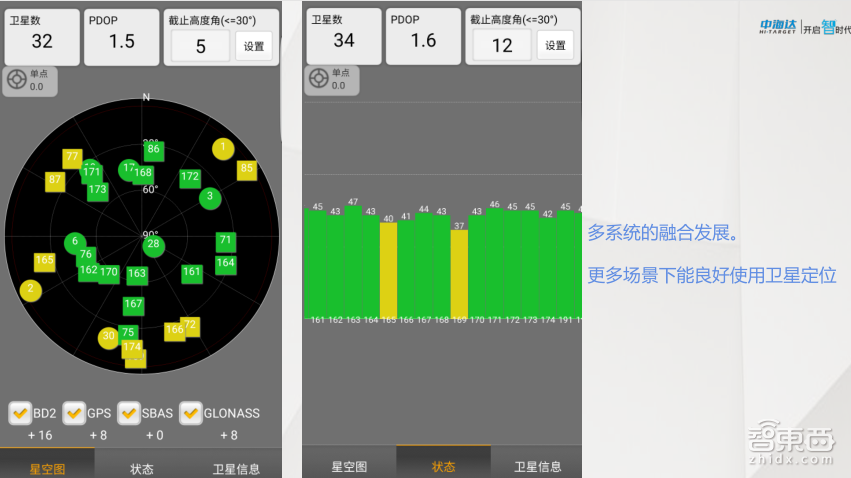
上图是通过中海达接收机开机后显示卫星颗数的状态截图,可以看到目前北斗以及GLONASS导航系统都应用得非常好,并且卫星数也非常多,能到32或34个或者更多的状态。因此随着卫星数的增多,我们将能够在更多的场景下很好地使用卫星定位。

除了众所周知的四大导航系统外,还有四个区域性广域差分增强系统,我们也把它们纳入到GNSS系统中,分别为WASS、MSAS、EGONS和GAGAN,它们作为区域性广域差分增强服务来使用,这样可以让单点的卫星定位能做到更稳定、定位精度更高,从而实现1~3m、1m甚至优于1m的定位。

通过这张图我们可以非常直观地看到三大区域性增强系统所服务的区域,很明显美国的WASS系统在美国收到的卫星单点定位精度是非常高的,一般都能做到1~3米;欧洲的EGNOS系统也能做到非常好的区域性增强服务;日本和我国东部以及东北部也能收到日本的MSAS增强系统;印度也有一套自己的区域增强系统GAGAN系统。
这些区域性增强系统都是为了更好的服务当地区域卫星定位,让定位更精确,这样就能让更多的应用场景使用到卫星定位。
随着定位精度越来越高,必然有很多应用场景包括智能化场景都能使用卫星定位技术,同时还可以进行定位判断以及时空判断。

接下来我跟大家简单地讲一下多星多频联合结算。每套卫星导航系统都是通过不同的频段来播发不同的卫星信号给地面去接受的,比如GPS有L1、L2、L3三个频段,北斗有B1、B2、B3三个频段。
为什么要用这么多的频段去播发卫星信号呢?在这些频段中,除了一个是做特殊用途之外,其他的都是为了做到更好的抗干扰以及更良好地去结算误差,从而提供更好更稳定的定位服务。目前我们用的很多定位模块和RTK模块,我们叫作多星多频,这种定位设备也是这种原理:通过接收多个导航体系的卫星以及多个卫星导航体系下的不同频段来做联合结算,使得定位精度更高、性能更稳定。

以上图为例,GPS是通过三个不同的频段来播发不同的卫星信号的,L2、L5在多频段结算中有着非常好的辅助作用,因此一般的多频接收机都需要去接收L2、L5频段,这样使得接收机结算的精度更稳定、更可靠。

从以前的单系统定位到现在的多系统多频段定位,可以做到更快速的收敛时间,在很早以前用单GPS来定位,做FIXD厘米级RTK固定解需要用几分钟才能做到良好的固定,现在通过多系统多频道的联合结算,可以达到几十秒的收敛时间,未来甚至可以实现秒级的固定解。
使得高精度时空定位成为可能,对智能应用来说可以做到开机不久就可以进入到高精度的定位状态下,这对我们无疑是非常便利的。
通过上面对GNSS的简单讲解,可以让各位朋友完整的了解到GNSS系统运行的大概情况,从而对未来的自动驾驶、自动化机器人以及导航等各领域在一些需要注意的问题点做一些铺垫。

下面我们来分享一下GNSS高精度定位在自动驾驶中的作用。
我先简单的介绍下中海达,中海达成立于1999年,一直专注于做测量领域的高精度RTK和海洋测绘跟高精度的结合方面产品,2011年我们成功在创业板上市,目前在高精度卫星导航领域也占据了一定的市场份额。我们在高精度定位领域奋斗了19年,有着丰富的技术沉淀,并且为我国很多行业培养了很多相应的人才。中海达也是国内创业比较早的一家公司。

在现阶段的汽车领域或者自动驾驶领域,大家对中海达还是比较陌生的。在GNSS测量领域,我们一直都占有一个比较大的市场份额,同时通过了三大品牌的市场运营,就国内而言,目前在测绘高精度定位RTK的市场份额已经占到了40%。
另外,我们很早就成立了中海达定位公司,专注变形监测、农机自动化驾驶以及机械控制市场的开拓。
从2011年开始,我们就进入了农机自动化驾驶,也就是说,在那个时候就已经通过GNSS技术来改造我们中国的拖拉机,从而实现在农田这种封闭环境下的自动驾驶,并且在新疆以及东北等区域形成了一定规模的应用。
在2008年开始自主研发的时候,我们深切地知道天线的自主研发非常关键,如果没有自主研发的天线,那么很多产品都不符合应用场景,因此形状会做的比较大,比较笨重,并且性能也比较差。
从2008年开始自主天线研发,到2013年我们已经完全掌握了自主知识产权天线的迭代,做到高精度GNSS天线的自产化,并且成立了我现在所在的这家公司,广州比逊电子科技公司,主要做北斗高精度板卡以及芯片等底层技术上的突破。从而中海达就形成了从底层的板卡、芯片以及GNSS天线的全自主研发。
另外,“北斗地基增强系统”我们也叫作GNSS基准站,在运营和生产上都有丰富的经验和技术积累,从2005年开始,我们累计做了上千个参考站并在国内运行,因此我们在这一块也有相当大的优势。

在自动驾驶生态中,GNSS定位是非常重要的因素。为什么它很重要呢?我将从高精度地图和GNSS高精度定位两个方面来介绍,这两个高精度定位技术对自动驾驶来说,也是一条非常基础且非常重要的语句信息。
高精度地图现阶段是通过一些后处理技术,把典型数据、图片数据以及高精度的pos数据紧密融合在一起,通过后期的加工,形成了基本的高精度路网信息,为无人驾驶汽车提供了基础的地图导航服务。
在无人驾驶汽车上实现实时RTK定位,对技术的要求比较高。当无人驾驶汽车拥有高精度的位置信息之后,就可以跟高精地图进行匹配,从而形成了良好的导航功能,能为我们车上的传感器进行时间同步或者导航提供了最基础的时空信息。

接下来为大家讲解高精度在自动驾驶领域的重要性。
首先,对于高精度地图的采集,高精度定位在高精地图采集中是一个很普通的传感器,但是它很重要。通过上面这张图,大家可以看到高精度地图采集装备的大体构成。接下来我把它们拆分开来,简单地介绍一下大概的原理构成。
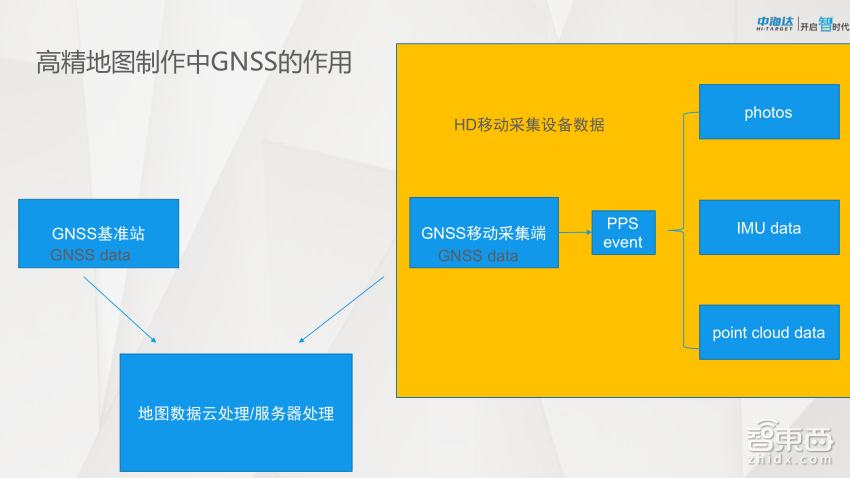
通过这张图可以比较直观地看到专业高精度采集车的基础构成,GNSS移动采集端提供了GPS原始数据,由原始数据再根据接收终端进行PPS同步,使得高精度采集车上的相机、IMU以及点云激光器等采集设备都做到了时间同步,使得每一个器件的触发也都得到了统一。
当数据得到统一之后,我们把这种数据叫做原始数据。在移动端时会把原始数据上传到服务器或者是给到地图云服务器进行处理。在做处理的同时,需要到基准站上做高精度的后处理服务,使得Pos信息得到高精度的修正。这样一来,在移动采集端的相片、IMU以及点云就可以得到高精度的事件信息。最后通过专门的软件形成高精度的地图。
上面我简单地介绍了高精度地图的形成原理,实际上具体的还会更复杂一些。因此在自动驾驶领域,高精度地图是一个非常重要的基础,因为每一个地物信息以及属性都需要非常高精度的数据来支撑,相当于所有数据的一把尺子,因此GNSS精准定位能为高精度地图提供更精准的地物属性。
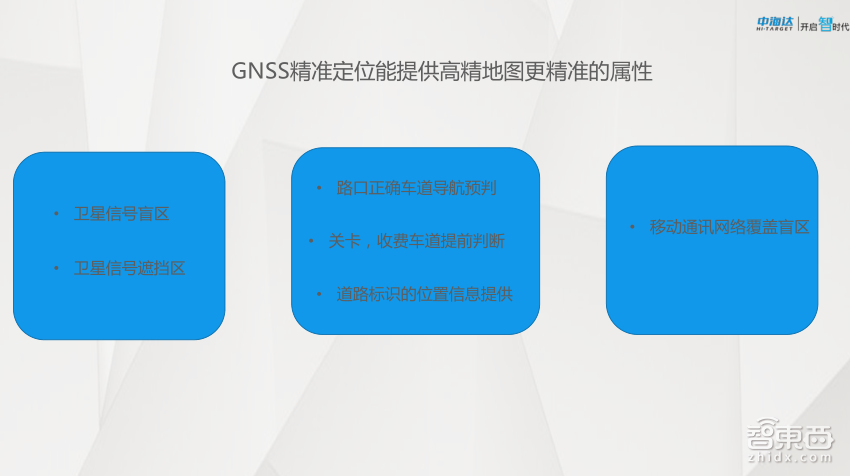
这些地物属性可以为自动驾驶汽车提供更好的判断。这里面我列举了三个方面进行区分:
1、卫星信号盲区以及卫星信号遮挡区;
2、路口正确车道导航预判、特殊关卡和收费车道的提前预判以及提供道路标识的位置;
3、提供移动通讯网络覆盖的盲区以及弱区的判断。
当汽车驾驶到这些区域时,车上的传感器可以根据高精度地图提供的这些属性进行一些预判,大大地降低了实时算法的压力。

接下来跟大家介绍一下现阶段自动驾驶汽车的硬件架构,GNSS定位设备也是必不可少的。GNSS提供了实时的高精度位置信息,除了与高精度地图做匹配,还会给予各种器件的时间同步以及事件的触发同步,这样能让自动驾驶汽车上的所有器件都能做到在某一时刻下统一去做某一件事情。
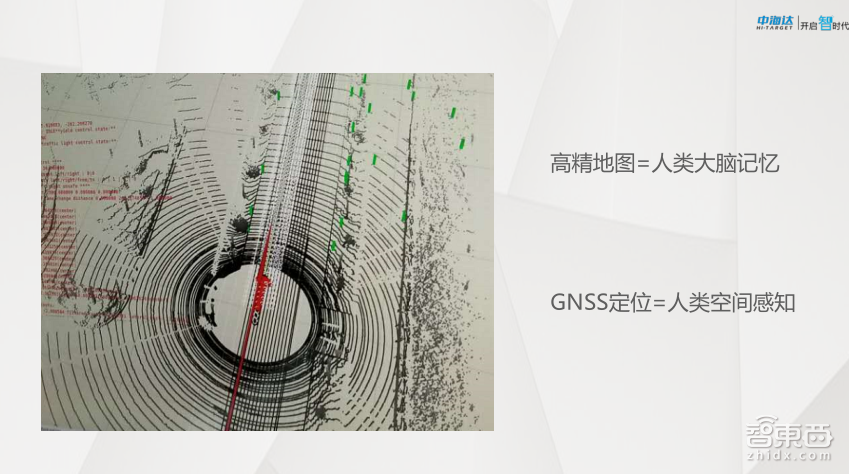
之前高德的老师也分享过,高精地图相当于人类大脑记忆中的路线,也就是对大脑中物理空间的记忆,GNSS定位相当于人类对空间位置和时空判断的感知,通过二者结合从而知道去哪里、怎么去,目前自动驾驶或者机器人也是往着这方向在发展。

对于自动驾驶的汽车,可以将它看作一个户外全自主机器人或者高智能的机器人。我认为机器人是导航与控制两大部分的相互融和,而高精度定位刚好是做导航这一部分。这些导航与控制在高精度地图的基础上去做各种判断,从而实现了全自主的运作。

数据时空基准的统一是高精度定位的基础,这里包括了高精度地图信息以及实时的高高精度定位,现在的高精度定位都是通过RTK技术来获取的,而RTK定位技术是一个相对定位技术,所以相对定位必须要做到时空基准的统一,否则高精度地图信息的位置与高精度实时定位的位置是不匹配的。
因此我们国家在很早以前就推出了国家2000坐标系,并且基于这种地图信息以及高精度测绘市场的地图信息做了统一坐标系的工作,对未来的自动驾驶、自动化运作行业提供了时空基准。

在这里我总结了一下,在自动驾驶领域涉及到的五个时空基准必要因素:GNSS卫星、高精度地图、全疆域通讯网络覆盖、全疆域统一基准的GNSS基站、性能良好的移动端GNSS接收机,也就是高精度定位的五大必要因素。
接下来分享一下GNSS高精度定位在无人驾驶中面临的挑战,实际上它面临的挑战还是蛮多的。包括:
1、如何保障高频的稳定输出;
2、通讯链路和基站的保障如何能做到稳定可靠;
3、未来大规模可量产方案是什么。
目前在自动驾驶中RTK技术要克服的难点包括以下三个方面:
1、遮挡环境下的GNSS+INS融合,在遮挡环境下要做到稳定可靠的高输出;
2、在高动态下的定位稳定输出,才能让高速行驶成为可能;
3、高频率定位输出的稳定性,对于高速过弯有着非常好的辅助。

在导航领域,GNSS跟惯导必然是共同存在,分不开的,二者融合融合能很好地解决了隧道、高楼、桥底或者树林等遮挡环境下的高精度持续性输出,这也是为在城市使用自动驾驶卫星定位时提供的非常重要的两个辅助。
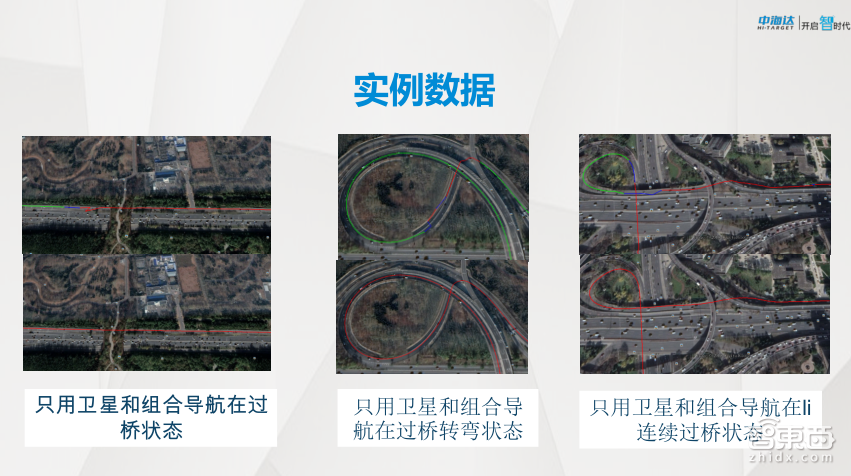
可以看到上图的实例数据,这是卫星定位和组合导航两者在过桥环境下很名显的变化,有惯导辅助可以做到轨迹非常圆滑,并且能持续性的输出,对于在过天桥、过树林或者是在遮挡环境下都能有持续性输出。

但是只有GNSS和高性能的惯导做组合导航也是不够的,虽然可以做到低延迟、高稳定性以及高频输出,但如果是长时间的卫星搜索或者卫星信号丢失,那么它的定位精度也会越来越差。
而为了提升数据的稳定性,有时候还需要接入车辆的轮速、方向偏度以及未来的视觉辅助定位从而防止车道偏离。只有做到多重定位数据的相互融合,才有可能在无人驾驶汽车上做到更加稳定的高精度持续性输出。

这张图可以看到高精度定位技术在自动驾驶中总的技术方案。主要是由基准站组成大区域的基准站网,通过移动通讯传输到控制中心,而数据通讯也通过控制中心来获取相应的服务,从而形成高精度的实时定位。
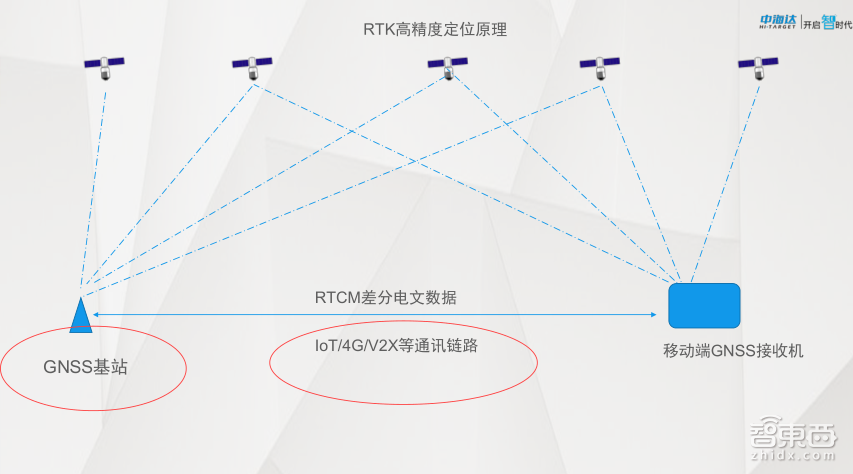
把过程剖析出来就是上面这张图。在这张图上面,我画了两个标红的关健处,第一个GNSS基站,由于目前在国内甚至在全球都没有做到全疆域的覆盖,因此它是需要不断地发展的;第二个是IoT/4G/V2X等通讯联络,因为移动接收机跟基站之间要保障有一条非常稳定的链路来实时传输差分电文数据,因此会用到4G、物联网或者车联网等通讯手段,但是以现在的通讯手段没有能做到任何时间任何位置都可以稳定可靠,同时这一条链路现在也没有做到非常稳定可靠的应用场景,这也是在上面高精度地图部分,提到的需要做到提前判断的功能。
由于社会的快速发展,目前国内也出现了像千寻位置这类做全国性差分电文数据服务的公司,另外我们国家测绘地理信息单位也开放了相应的高精度差分服务,这样一来,基站这方面就可以在国内得到快速的发展,但是这些都是高度依赖于现在的通讯网络技术,因此可以看出高精度定位技术是非常依赖于通讯网络的。

接下来我简单地给大家介绍一下中海达Hi-RPT全球定位服务的可用性,这也是我们企业正在做的事情,主要是为了解决如何提高在全球全疆域覆盖传输差分电文服务的稳定可靠性。
这套方案大体上是通过L波段卫星播发加上移动互联网播发形成双链路播发,从而让差分电文做到稳定可靠,并且脱离了疆域的限制。
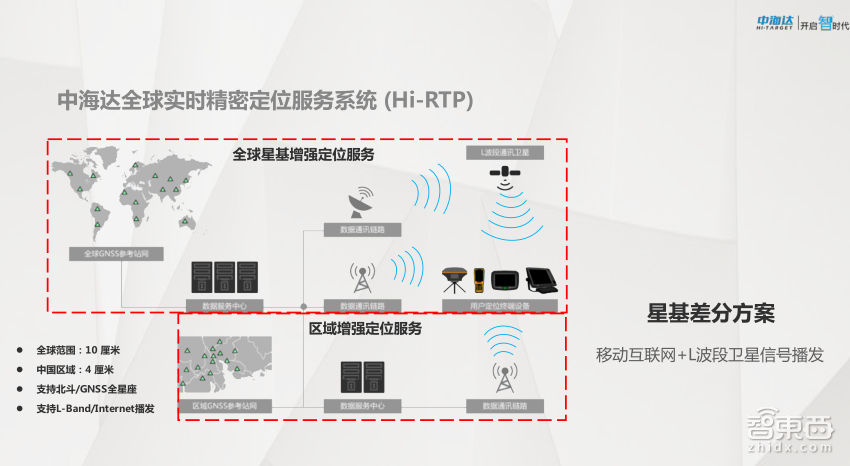
上图是总体的架构图。上图可以看出,在全球范围内,我们的精度达到10cm;在中国区域,目前可以做到4cm,并且能够非常好地支持北斗/GNSS全星座。
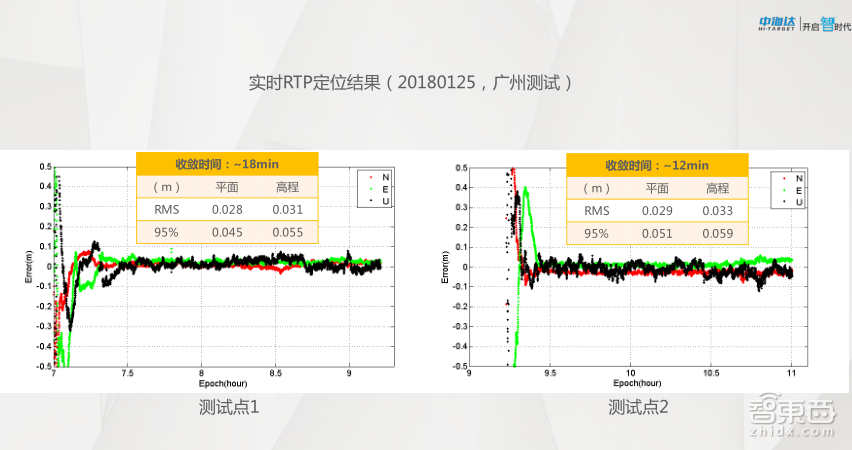
上图是我们1月份在广州测试的一个截图。这是通过星基来播发的,因此对应的会需要一个收敛时间,对于收敛时间,随着技术的提升,收敛时间会越做越短,但现阶段还是需要二到三十分钟的收敛时间才能达到厘米级,而我们现在也在为大疆域高精度的差分服务做努力。
接下来我简单讲一下大规模可量产方案。
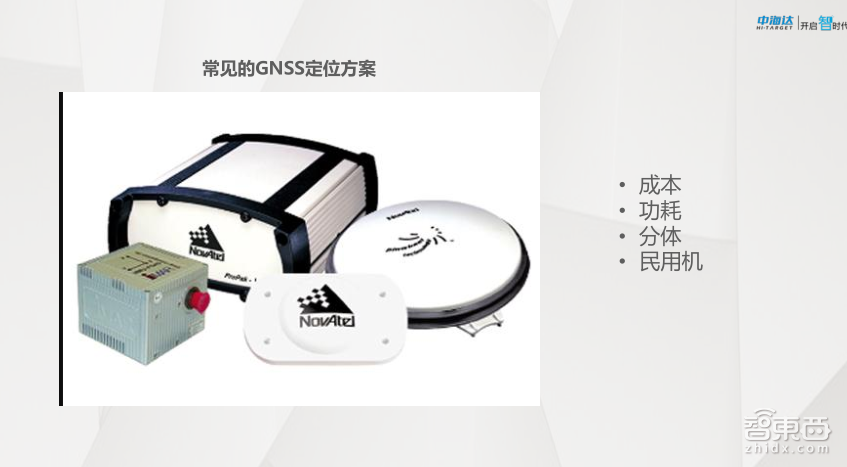
这张图大家应该比较熟悉,现在的自动驾驶汽车上几乎都能看到用惯导来做高精度定位组合导航。但也存在着一些缺点,总体上看成本有点贵,体积有点大,同时功耗也有些高,如果是做实验工程车还行,但是要做到量产的话,这种方案可能还有待商酌。
要做到量产级自动驾驶汽车的器件,必须得符合汽车级的器件标准要求,并且需要有非常高频的输出,同时还需要做到组合导航。这对于我们现阶段的很多方案都需要进行调整,对于此,我们中海达也做了很多的研究和探索,并且针对这一市场也开发了一些自己的芯片。
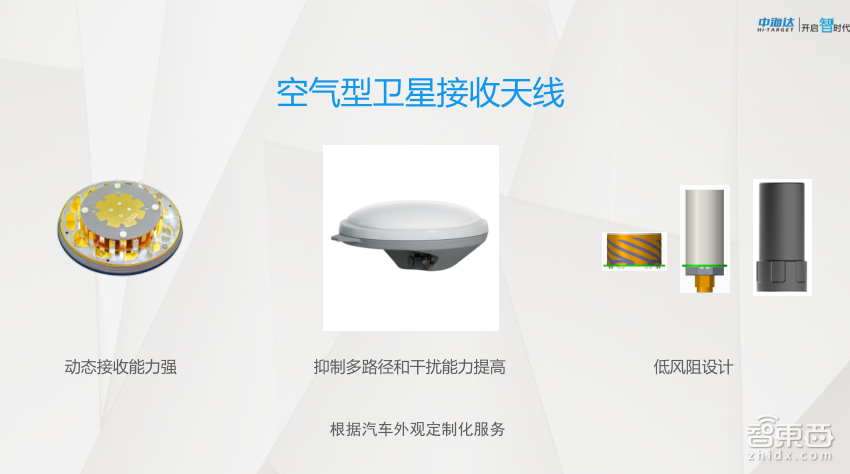
上面介绍了车载端GNSS接收机的重要性和可量产方案,而它的搭档卫星接收天线也是至关重要的,它是所有数据的来源。这也是大家容易忽略掉的。
拥有一个接收能力强的天线和能抑制多路径效应的天线可以大大提升接收机的定位能力并加快它的锁定时间。
另外,对于自动驾驶汽车的外观来说,现在都是顶着个蘑菇头在上面,确实不太雅观,因此对于量产来说,这种方案是必然会被摒弃的,同时也需要根据汽车的外观,提供可定制化的服务,才能做到大规模的量产。
上图展示的这些是我们中海达做的基于空气型的卫星接收天线,也是我们一直走的技术路线。

未来真正做到百万级的量产应用方案又是怎样的呢?
百万级的量产应用方案必然是一个非常低成本的方案,而这种方案是需要做到芯片级的,因此,无论是高通还是博通等这些芯片巨头也在努力产出这种高精度定位芯片方案。
我们上一年在这块也有了一定的研究,适用未来百万级的可量产方案必须要满足贴片式生产,这样才能做到大规模、有品质且低成本的方案。
上图的右边是大概的架构图,未来我们会在这方面进行大规模的修整。
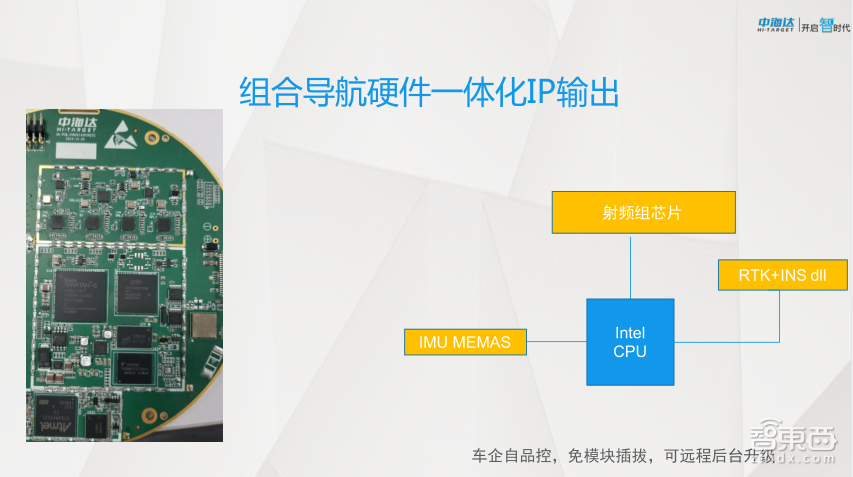
上面也说到这些底层技术都是中海达自主知识产权设计的,这也使得组合导航的硬件一体化IP输出成为可能,因此对于车企或者合作伙伴来说,都是可以作为一个高精度定位的传感器厂商出现,未来大规模生产很可能往IP输出方式呈现给大家。把高精度射频芯片、基带芯片以及RTK算法融入到芯片中来,可以做到高度集成的应用。

最后给大家介绍一下软件RTK方案,什么叫软件RTK呢?相信大家都比较陌生,软件RTK是把RTK算法放到整个车机系统中,通过外部的卫星信号以及传感器原始数据的接入,在汽车上把高精度的定位算法运算出来,从而给汽车做决策。因为未来的自动驾驶汽车是一个运算能力非常强的终端,在这一块它拥有非常强的实力,所以中海达不单单可以做硬件IP的输出,还可以做软件IP的输出。
我的分享就是这些,谢谢大家。
Q&A环节
提问一
杨刚-博派汽车-CTO
1.车载RTK定位精度是多少厘米?
2.无人驾驶车辆的行驶轨迹控制精度是多少厘米?
余绪庆:1、RTK设备只要进入到固定解,它的定位精度能做到1~2cm,并且高层精度能控制在2~3cm的精度。
2、我们的定位设备能提供1~2cm的平面定位精度,但是控制往往有延迟以及控制的误差,因此做到与原始数据越接近越好。理论上,最终的控制精度跟实时精度会有10~20cm的误差,而横向精度可能是在0.2度左右。
提问二
金晶-航天704所-工程师
1.GNSS差分信息通过什么途径获取,移动基站或卫星,对实时性的要求。
2.GNSS信号在城市峡谷信号被遮挡怎么处理?
余绪庆:1,对于差分信号的获取,一般有三种方式:1,通过国内专门运营差分基站服务的公司,比如千寻位置;2,通过一些有关的部门来获取,比如当地的地理信息测绘管理部门;3,一些企业通过自建基站来获取。
现在的差分传输是通过移动互联网通讯技术来进行通讯传输给到移动端,因为差分修正电文是每秒都需要传输的,在高频状态下必须要做到实时的修正,因此实时性是非常重要的。如果网络延迟过高,就会导致差分周期变大,从而导致精度下降或者退出厘米级的固定解。因此保障通讯的实时性和稳定性,对于高精度定位来说非常重要,同时现在也在通过其他的手段来防止中断后该怎么处理的问题。上面我也讲过,移动网络和星基差分双链路的传输是未来差分电文传输通讯技术的发展趋势。
2、这个问题问的非常到位,因为这种场景非常容易遇到,并且是不可避免的。大家都知道GNSS接收机都是靠天吃饭的,如果被遮挡,信号必然会衰弱或者断开。因此这里就需要一些强有力的卫星接收天线,最好是跟这些设备做过联调的天线来做卫星稳定信号的捕捉,以及市区中楼宇的多路径效应。
在信号遮挡区(比如天桥、隧道)的时候就需要用到组合导航 + 视觉车道线来做辅助,并利用高精度地图,提前知道信号盲区或者弱区,再利用惯导跟视觉做实时SLAM技术介入,就能大大地提升稳定性。
提问三
高春乐-美团-工程师
如何检测GPS设备的精度,常用评价指标或标准有哪些?对于自动驾驶GPS关注点在哪些地方?
余绪庆:这个问题问题问得非常专业。检测GPS精度,如果是在固定状态下,精度是非常好检测的,用测量鉴定过的专用RTK设备,来定位其自动驾驶汽车天线中心的位置,即可检测。测绘领域的RTK设备有国家计量局出具的计量标准和方法来鉴定。但是对于移动状态下如何鉴定精度,当下是比较难的一个问题,我们一般用测量型RTK设备放置在汽车车顶,天线与汽车天线固定误差通过量算确定出来固定误差,然后设置高频输出。双方用每一针数据对比最大最小值。对于定向精度就比较好标定了,只要用高性能的激光惯导为真值,做对比即可。
对于自动驾驶汽车,使用GPS应该注意,高频输出的稳定性、差分通讯的畅通性和天线的安装空旷位置安装。因为使用高精度解做解算,所以还要注意如果数据非固定解和数据万一无输出的备份冗余设计。
提问四
史高雄-腾讯-专家工程师
中海达有哪些产品可以推荐,与业界其它公司的精度对比如何?
余绪庆:这个问题对于我们中海达来说是一个好问题。我觉得中海达公司在国内做了这么多年RTK产品,在RTK技术上拥有比较深厚的技术沉淀。在RTK核心板卡。天线、惯导和天地一体差分服务方案,还有核心底层RTK算法企业级合作上都可以深入合作定制。
与其他公司对比,其实RTK只要进入固定解,精度都是一样的,都可以做到厘米级。因为RTK定位技术是整套方案的大集成,并非一个设备能完成的。所以整套方案的可靠性反而是我们中海达存在的优势。
提问五
吉利-王高明-车联网
1. 高架桥上与高架桥下,GPS能定位出来么?
2. 当其中一个GPS天线失效了,有其他途径获得GPS信号么?备用器件是什么?
余绪庆:1、在高架桥上是可以的,因为桥上是面对天空的,当然可以接收卫星信号进行定位的;但是在高架桥下,由于几乎都被遮挡了,因此是不能定位的,这时候就需要用惯导进行辅助了。
2、当GPS天线失效的时候,是不能接收卫星信号的,也是不能定位的,因此对于全自主驾驶或者全自主飞行器来说,多冗余设计是非常有必要的,这样可以大大提高我们设备的可靠性。而对于备用器件,我们一般会选用一些普通的天线和模块来做双算法和双融合设计。这样即使在一套系统失效的前提下,另外一套系统也能稳定地介入来做辅助工作,这样能做到比较好的稳定。另外对于双冗余设计,我们也有一些针对于全自主无人机的产品。
提问六
王萌-华为-高级研究院
1.目前贵公司的定位解决方案的售价大概是多少,能否透露城市普通道路的一个动态精度和可用率情况(非高速公路和快速路)
2.是否有牺牲精度,提高城市可用率,收料速率的方案,因为rtk主要面对测绘行业,对信号要求比较高,在城市可用率较低,那么是否有亚米级(低于rtk),但可用率高的解决方案。
余绪庆:1、对于目前解决方案的售价,主要是看我们要做的类型,价格有高也有低。但是随着未来大规模的应用,价格是可以做到非常合理且低廉的。在高速上使用RTK高精度定位,如果是在网络稳定的前提下,是可以做到非常高的可用率,一般能做到95%以上。
2、在城市中,由于城市路况比较复杂,并且遮挡也会比较多,这种情况下如果能有一个组合导航来维持和辅助的话,也是能做到非常好的定位精度的,但是由于环境比较复杂,车速也比较慢,这时实时构建的SLAM技术也会用上。亚米级的定位方案也是可行的。但只能在比较低速的场景下才能用到。而在高速的场景下是要用到高精度来辅助的,因为所需要的定位精度会比较高。相对来说,低速会通过其他的器件来做辅助,这样可以解决城市中比较复杂的环境。
