








智东西(公众号:zhidxcom)
编 | 伟鸿
导语:Centauro公司全新救援机器人发布,采用轮、腿混合动力驱动。
我们从美国国防部高级研究计划局机器人挑战赛中学到的一件事是:机器人有腿走路是很有用的。但更有用的是,它可以灵活运用多种模式的移动能力,同时可以根据不同的情况进行切换。在刚果民主共和国,我们看到了各种不同的设计,但最独特的方法之一来自德国波恩大学(University of Bonn)的莫迈罗(Momaro)机器人。
莫迈罗采用了“半人马”的设计,四条腿的底部有轮子(像有轮子的四足动物),与一个有头和手臂的人形上半身相连。它是刚果民主共和国排名最高的欧洲机器人,仅用34分钟就完成了近乎完美的奔跑。我们一直在想,“半人马”的设计是否会启发其他的灾难救援机器人,现在我们知道,答案是肯定的。
今天,一个由欧洲研究团体组成的联盟发布了一个新的半人马机器人,名为Centauro。这个机器人是由Nikos Tsagarakis领导的团队在意大利理工学院(IIT)制造的。Nikos Tsagarakis是位于热那亚的IIT类人及以人类为中心的机电一体化实验室的负责人。
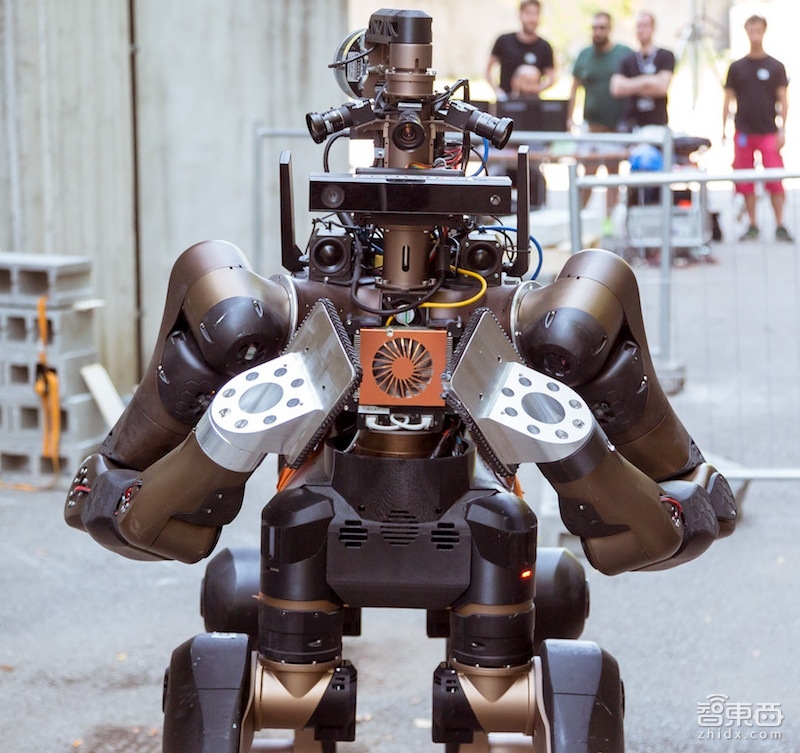
从外观上看,Centauro机器人拥有和其他IIT类机器人,如WALK-MAN相似的坚固性能,这意味着这是一个既能作为研究工具,又能在现实世界中发挥作用的机器人。”尽管体型高大,但Centauro比视频中看起来也更加灵活。它由轻金属及3D打印塑料外壳制成。里面有配有同时处理多种需求的三台计算机。
Centauro机器人之所以被称为半人马有一半原因是因为它的腿:Centauro的腿有6个自由度,可以通过旋转和伸展臀部、膝盖和脚踝来实现关节的运动。机器人可以采用不同的配置,比如四足机器人的典型的腿部配置,包括内、外膝关节,以及蜘蛛腿的配置,更有利于机器人操纵大型工具。车轮允许机器人发挥基于轮子的移动性,由铝合金制成,其外层用弹性体材料进行过模,从而保证了粘阻尼接触,同时在地面上滚动时产生适当的摩擦。
而另一半原因在于躯干:Centauro机器人能够使用人类工具来执行操作任务,并且能够显示出比一般成年人更高的操作强度。它的轻质臂(10.5公斤)显示有效载荷比大于1:1;因此,单臂的有效载荷约为11公斤。此外,它的高性能和抗冲击弹性驱动系统允许机器人执行需要剧烈物理交互的操作任务,而不会对机器人部件造成物理损伤。
这类设计的理念在于,这种四足动物和类人动物的结合优化了稳定性和移动性,同时允许远程操作人员更直观有效地控制机器人的臂膀和手。像这样的机器人在灾难场景中的有效性和效率取决于它们的控制界面有多直观、有效。
为了解更多的细节,IEEE团队采访了Nikos Tsagarakis,正是他领导的IIT团队开发了Centauro机器人。
IEEE:“你能谈谈Centauro机器人和Momaro机器人有什么关系吗?”
Nikos Tsagarakis:“ Centauro机器人的视觉感知系统遵循着Momaro开发的原理和传感器安排。Centauro机器人的运动也受到Momaro的启发。但是与Momaro相比,Centauro的腿部运动学有所不同,在调整腿部末端执行器(轮子)相对于地形的方向时提供了更多的灵活性。此外,Centauro的操纵能力和运动学也有很大的不同,它具有更好的操纵能力和强度。Centauro的躯干也有灵活性,这是Momaro所没有的。”
IEEE:“IIT已经开发了许多用于双足机器人项目的专业技术,为什么现在要造一个四条腿的机器人呢?”
Nikos Tsagarakis:“类人机器人无疑是IIT团队的主要研究方向,因为我们相信,从长远来看,这种身体设计将更有效地在人类基础设施中发挥作用。Centauro机器人实际利用的技术以及驱动、设计原则、控制系统等都在我们的类人形机器人开发线上,它代表着我们致力于将技术转化为实际应用的努力。我们都知道,类人机器人想要在现实中稳定运行仍需要一些时间。Centauro机器人混合了轮式与腿式机器人的特点,从而使它更容易使用。我还要指出,我们的类人发展线没有被抛弃,仍在同样努力,在不久的将来会有新的成果出现。”
IEEE:“开发机器人最大的技术挑战是什么?你是如何解决这个难题的?”
Nikos Tsagarakis:“我们想设计一个在保持自身尺寸和重量接近成年人的同时还能有和成年人相似的肢体动作的的机器人,这不是一项简单的任务,而且需要在原有的设计基础上进行实质性的升级。例如,Centauro机器人的手臂重量只有WALK-MAN的一半,但仍然具有更强的力量和体力。”
IEEE:“你希望明年Centauro能达到什么程度?你对它的未来规划是什么?”
Nikos Tsagarakis:“一个目标是机器人在越来越复杂的移动操作任务中能有更好的表现,这些任务将涉及高负荷和苛刻的物理交互——换句话说,就是类似于人类灾难救援者遇到的情况。另一个目标是不断提高机器人自主完成任务的能力,因为我们旨在提高机器人的整体效率,以及在最少操纵者环境下的效率最大化。”
原文来自:IEEE

