








10车东西(公众号:chedongxi)
文 | Origin
10月12日,云栖大会第二天,杭州淅淅沥沥下起了小雨,车东西来到千寻位置的自动驾驶体验区,感受了一把无人车。
这辆自动驾驶中巴隶属于清华大学苏州汽车研究院,由千寻位置提供高精度定位支持。在雨天的云栖小镇里,它开车的风格就一个字——稳!
一、现场体验:小心翼翼的“新司机”
来,先看一看这辆普普通通的江苏九龙中巴车。除了头顶的卫星定位信号接收天线,以及车身旁边贴着的“自动驾驶车”,它并没有太多自动驾驶的显著特征。稍微留心一下,可以看到车头顶着一枚Velodyne的16线激光雷达。

激光雷达下面,进气格栏之后隐藏着一个毫米波雷达,由德尔福提供。

车多前风挡上,则是一枚单目摄像头。
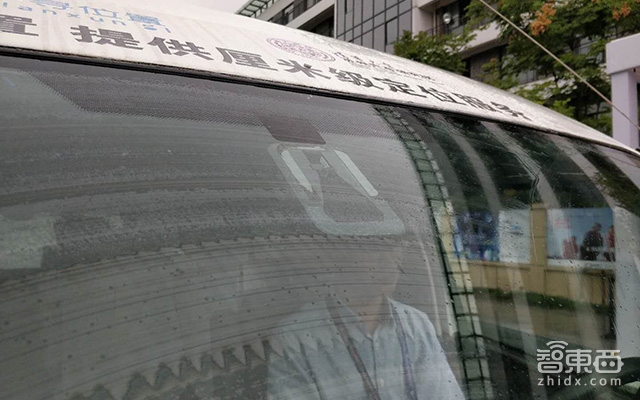
因此车虽然不拉风,但是在传感器种类上,这辆九龙中巴是很齐全的,所以它采用的也是传感器融合的自动驾驶方案。而千寻在其中提供的是厘米级的实时高精度定位服务。
那么,这辆无人车开得如何,发车发车。视频在这里。
这辆车是沿着固定路线在云栖小镇内的道路上演示,最高车速20公里,园区内车流量不大,不过也时不时有行人穿过,算是一个半开放的驾驶环境。由于法律限制,驾驶座上始终是有人的。不过,作为一辆合格的无人车,司机的手全程都没有触碰过方向盘,也没有趁我们不注意悄悄踩刹车。

从驾乘体验来看,算不上特别舒服,车辆启停的顿挫感较强,转弯时打方向盘也像是分步骤完成,并非一口气转到需要的角度。一个解释是,车辆平台本身不够好(毕竟是十来万载17个人的车),改装难度大。清华苏研院对这辆车的线控系统进行了改造,让它得以自动踩刹车、打方向盘。不过这辆车电气化程度不够高,可以看到车内有不少加装的线缆。另外车辆控制本身也是一个难度很大的工作——Tier 1们都是以千人规模的队伍在做这个事。

(改装后的油门)
不过自动驾驶的九龙中巴在直道上的表现还不错,不会偏移车道,在车辆、行人路经其行车路径时会较为准确地提前减速乃至刹车。只是,这辆自动驾驶车有些过于谨慎了,在稍微靠近其行驶路径的地方出现障碍物时,它仍然会停住不走,即便沿着直线开过去并不会出现剐蹭。
随车的清华苏州汽研院的工程师告诉车东西,这是因为下雨加道路是半开放的缘故,为了安全考虑,采用了比较保守的驾驶策略,没有添加绕障的算法模块。
雨天对自动驾驶的影响确实是比较大的。在自动驾驶所要使用到的传感器中,激光雷达是通过主动发射激光束接收反射来重建周围的3D环境信息,雨天的水珠会对激光光线产生吸收或者衍射,使得激光雷达无法正常工作。风挡玻璃后的摄像头,在雨天也会因为光线、雨雾等问题可视范围下降,而玻璃上的水珠也会遮挡其视线。虽然能够通过软件算法降低影响,但总免不了受影响。
本来是三种传感器协同工作带动车辆自动驾驶,此时却只能主要依仗毫米波雷达探测周围环境。而毫米波雷达的分辨率并不能达到激光雷达的水平,因此只能探测到前方有障碍物,却无法准确分辨障碍物究竟是一个人还是一个垃圾桶。
因此,在这一次自动驾驶演示中,小心为妙是稳妥的选择。这些问题也说明了,自动驾驶在不良天气条件下,面临的挑战仍然不小。
二、高精度定位到底有啥用?
这辆车是千寻用来展示高精度定位的,不过大家很难感受到“高精度定位”到底在这辆车上起了什么作用。

(接收卫星定位信号的双天线,在高精度定位中必不可少)
其实,在杭州的雨天下,千寻提供的高精度定位发挥的作用反倒体现了出来。自动驾驶系统中,车道线识别通常依靠摄像头或者是激光雷达,在雨天两者工作不佳。此时,厘米级的高精度定位能够把车辆“摁”在车道线中间,不让其乱飘。
而与千寻位置自动驾驶业务总监虞磊交流过后,车东西发现事情其实更进了一步,这一次高精度定位发挥的作用比我们一开始设想的更进了一步。
这次自动驾驶的路线是固定的,在演示之前,九龙中巴先在路线上开了一圈,而千寻的高精度定位服务记录下了其厘米级的驾驶轨迹。在演示开始后,自动驾驶车只需要继续在千寻的支持下进行厘米级的驾驶轨迹匹配就行,不用再花费额外的计算资源进行大量的路径规划运算,可以投入更多资源到环境感知、避障策略和车身控制环节。
意思就是,千寻已经在路上给你画了一条看不见的线了,沿着它开就是了,需要处理的就是正确应对进入驾驶路径的人或车。
其实这一方案在封闭园区或者封闭道路上能够发挥更大的作用。比如提供商用车自动驾驶解决方案的智行者,就使用了千寻的高精定位服务。虞磊也透露,在台北的BRT(城市快速公交)上,已经开始有这样的自动驾驶试点。因为城市快速公交的道路是固定而独立的,所以驾驶情景简单、重复,在高精度定位的支持下沿着既有轨迹行驶并没有问题。而国内的金龙等商用车生产厂家,也开始尝试采用以高精度定位为主的方案,在封闭道路上进行试点。
当然,即便是封闭园区或者是道路,仍然总是会有各种意外,高精度定位只能让车辆知道自己在哪儿,不能感知周围环境,所以各类其他传感器仍然是不可少的。
三、自动驾驶车上的高精度定位如何工作?
那么,千寻的厘米级精度定位服务在这辆九龙中巴上究竟是如何工作的?车东西给各位读者解释一下。
首先是车顶的两枚卫星信号接收天线,它们负责接收来自北斗的卫星定位信号,一根线缆把它们连向了放在车尾的自动驾驶计算机。这个方盒子中装着这辆九龙中巴的自动驾驶大脑。
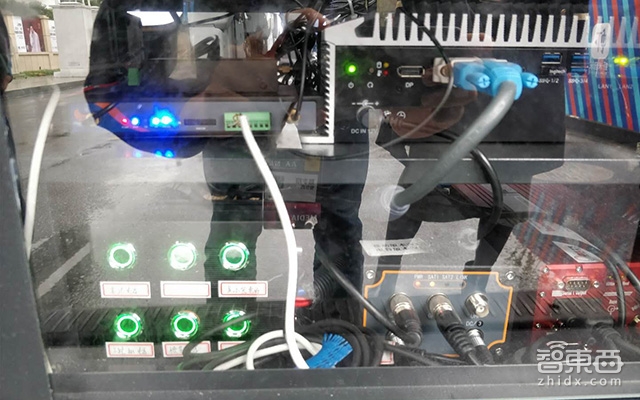
其中,上层左边的小盒子是车载的4G通信模块,右边则是自动驾驶的核心处理单元。下层左边是各个模块的电源。下层中间的模块则是卫星定位信号接收机(车顶双天线负责信号接收,而接收机负责处理信号),右下是惯性导航单元IMU。
天线收到北斗卫星定位信号后交由接收机处理,此时直接输出的话,会是精度较低的定位信息,只能达到米级——因为信号由卫星发送到天线此时,千寻就该发挥作用了。依托其1500个北斗地基信号增强站以及12万个虚拟基站,千寻能够输出校准定位误差的差分数据。针对自动驾驶的差分数据都是实时的,并且规模庞大,对它们的运算和存储都是由阿里云负责。通过车载的4G通信模块,从云端下载差分数据再结合车辆本身接收到的北斗定位信号进行解算,这辆自动驾驶的九龙中巴就能获得实时的厘米级定位服务。
厘米级定位的数据则是整辆车进行自动驾驶决策的重要参考。
DAPAR开启的自动驾驶新一波发展浪潮中,以何种传感器为主的讨论延续至今,并且仍无定论。而高精度定位虽然不像摄像头、毫米波雷达、激光雷达三种传感器那样成为令人瞩目的主角,但是地位一直很稳固:不可或缺——因为大家都会用到它,所以没有争论的必要了。基本在所有的自动驾驶车上,我们都会看到卫星接收天线。

(DARPA无人车挑战赛,通用的参赛车辆用了3条定位天线)
一般来说,如果自动驾驶公司想要独立获得车辆的高精度定位数据,通常需要自己找硬件模块(核心是GNSS芯片)、花费不少时间建设价格昂贵的差分基站,同时需要自己拿出高精度的解算算法。千寻的价值则在于,直接将一整套高精度定位的服务打包给出,给自动驾驶公司免去了很多麻烦。
结语:商用车自动驾驶或最先让民用高精度定位变现
在千寻之前,国内并没有面向民用市场提供高精度定位的公司,技术是一方面原因,人民群众的需求不强则是另一方面。而自动驾驶向高精度定位提出的刚需,给了千寻一个契机。
高精度定位服务要在自动驾驶上淘金,必须等自动驾驶技术足够成熟。从自动驾驶的发展路径来看,在封闭道路条件下沿着既定路线行驶的商用车更有可能先行迈向商业化——比如京东的无人物流车,又比如上文提到的BRT。高精度定位在其中将发挥重大的作用。
至于乘用车的自动驾驶,高精度定位也在其中早早占住了坑,等待技术的成熟。
当然,除了自动驾驶之外,高精度定位在其他领域也有不小的应用前景。要做电子围栏的共享单车、精确到小时的精准物流、定位还不够准的智能手机,广义上的移动终端,都有潜在的高精度定位需求。

