








智东西(公众号:zhidxcom)
编 | 白鸽
智东西2月22日消息,据IEEE Spectrum报道,近期,哈佛大学的研究人员展示了其最新的研发成果,即通过使用具有kirigami感应结构的可变形材料来模拟蛇鳞,从而制造出一种软机器人,该机器人能够像蛇一样,通过反复的充气、放气来爬行。

长期以来,机器人专家一直致力于研究蛇形机器人,其侧重点在于研究机器人在受限空间中的多功能移动性。从这点出发,我们可以看到各种能够很好的模仿蛇的“步态”的机器人。而蛇之所以特殊,不仅仅是因为其没有四肢,更因为它们的鳞片。
蛇的鳞片都是指向一个方向,这就使其在爬行过程中产生很大的摩擦力,从而令蛇能够更容易的向前移动,而不是向后移动。在移动时,其鳞片很滑,这有助于向前爬行。而如果蛇想要向另一个方向移动时,其腹部的鳞片又具有粘性,能够使其抓住地面,进行快速的移动。这也是bristle bots的工作原理。
来自Katia Bertoldi小组的哈佛大学研究人员通过利用蛇鳞的“各向异性摩擦”的特性,可将充气式软机器人的重复性脉冲运动转变为向前运动。而为了测试鳞片皮肤,研究人员制作了多种不同的可拉伸塑料片,并在每片上用激光刻上不同的扁平鳞片图案。这种结构能够在机器人充气并拉伸塑料片时,使其扁平的鳞片变形并从机身上弹出来,抓住地面并通过不断的充气、放气向前移动。
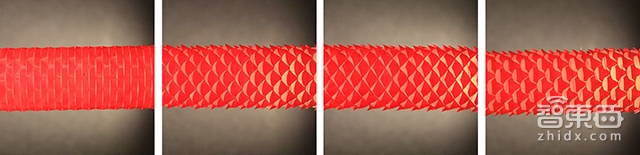
(雕刻的不同图案的鳞片皮肤)
研究人员为找到最好的模式,也尝试了一系列不同的比例模型,包括线性比例尺、圆形比例尺、三角比例尺以及梯形比例尺。
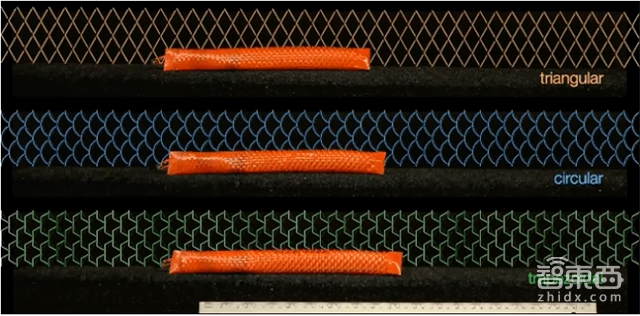
(具有不同形状的爬行机器人)
事实证明,对于这个特定的机器人来说,最有效的设计是梯形的。不是因为梯形能够产生更多的摩擦力,而是其允许皮肤能够伸展的更多。这意味着当机器人处于充气状态时,它能够进行伸展,这就使得机器人在其移动过程中,能够产生更长的“步幅”。当机器人向前推动时,只要鳞片设计能够有效的将自己锚定在地面上,就可以以拉伸的形式进行快速移动。
研究人员还注意到,其研究的鳞片弹出尺度有一个缺点,那就是当过度拉伸三角形鳞片设计时,会使塑料表皮过度伸长,其造成的结果就是即使机器人处于放气状态时仍会弹出鳞片,这也就意味着机器人的摩擦力会大大减小。当然,这可以通过不完全放气来解决这个问题,同时研究人员也在尝试使用不同的技术。
研究人员也表示,这种可变的塑料性皮肤可在两个方面影响系统反应。一方面,它增加了爬行机器人在刚开始充气时的延伸长度。另一方面,在整个驱动过程中,其永久的方向纹理结构可产生高度的“各向异性摩擦”特性。因此,当供气量在0到12毫升之间循环变化时,该爬行机器人的运动效率最佳。与其他具有kirigami皮肤的爬行机器人相比,其性能提高了约22%。
虽然这项研究主要集中在皮肤和鳞片上,但哈佛大学的研究人员指出,他们的方法很简单,价格适中,而且该皮肤还具有很强的伸缩性。此外,它还可适用于微型机器人或更大的机器人,甚至可能像行星探测器一样大。除此之外,在非移动性领域也可以得到很好的应用,例如将这种类型的皮肤应用在充气式机器人的手指上,以根据它们的需要调整握力。
原文来自:IEEE Spectrum

