








智东西(公众号:zhidxcom)
文 | Kiva
如今扫地机器人行业已经走过了三个重要阶段:第一代的随机式清扫、第二代规划式清扫和第三代的导航建图式清扫。而对于导航建图,目前业内主流方案有两种,基于激光雷达的LDS SLAM和基于摄像头的VSLAM。这两种技术路径各有优势,在业内也处于繁荣发展的状态,吸引了不少创业公司开发导航方案。
扫地机器人厂商也会根据自己的优势和产品定位选择不同的导航方案进行布局。Neato、米家、石头、海尔、浦桑尼克等都倾向于采用LDS SLAM方案,而iRobot、Dyson、ILFE、LG等则倾向于VSLAM。而国内扫地机器人巨头科沃斯则选择了双线全面的布局,是业内唯一覆盖两大方案的厂商。
在国内扫地机器人领域,科沃斯不仅市场份额占据着半壁江山,稳站国内市场第一梯队,同时它也是扎根行业最久的企业,成立于1998年,2000年科沃斯成立了独立研发团队,开始布局服务机器人业务,并于2009年推出第一款机器人地宝系列,翻开了国内扫地机器人研发的序章。
凭借着在导航技术上20多年的积累和产品场景应用经验,科沃斯基于基础的导航功能,为用户提供了更多细节方面优质的产品和应用体验。本文将深度分析科沃斯的双路导航技术,以及基于这两大方案科沃斯在产品细节和体验上所作出的努力。
一、扫地机器人两大主流导航建图方案:LDS SLAM和VSLAM
一般来说,扫地机器人的导航建图主要分为四个步骤:传感器采集信息(其中的传感器包括:激光雷达、图像传感器、里程计、悬崖传感器等)、定位与建图( SLAM)、路径规划、运动控制。这四个步骤环环相扣,构成了导航系统。其核心是传感器的信息采集能力以及SLAM算法和路径规划算法的有效性。
对于导航建图,目前业内主流方案有两种,基于激光雷达的LDS SLAM和基于摄像头的VSLAM,两种技术路径各有优势:
1、高精度的LDS SLAM方案
激光导航LDS SLAM的原理是激光测距,是以激光雷达作为传感器,通过发射激光接受反射,利用反射回的位移偏差对物体进行定位。
这种方法能够获得精度较高的距离信息,可靠性高,目前在业内已经非常成熟。但其缺陷在于成本相对较高,并且硬件凸起的结构会增加扫地机器人的厚度,降低通过性。
2、数据更丰富的VSLAM方案
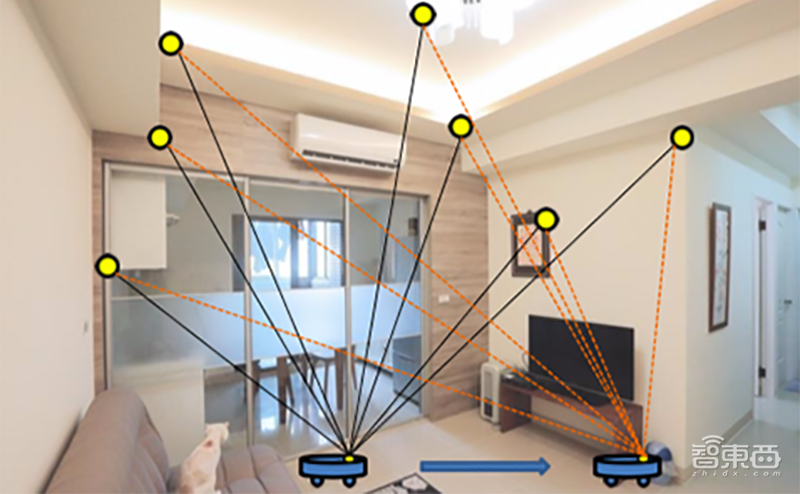
与激光导航LDS SLAM不同的是,视觉导航VSLAM是以摄像头作为传感器,相比能够直接获取方向和距离数据的激光LDS SLAM技术,VSLAM获取的是灰度或彩色图案,对于障碍点只能获取方向而无法直接测量距离。要想计算该点的距离,需要相机挪动一个位置再观察一次,按照三角原理进行推算。
其优势在于,采集的数据更丰富,成本更低。随着手机行业对于镜头的强劲需求,使得整个CMOS、镜头制造行业迅猛发展,带动其成本的降低,这也是VSLAM发展起来的重要原因。未来随着算法的进步,VSLAM会有更多的功能实现的可能。
LDS SLAM与VSLAM各具优劣,彼此之间并不存在明显的替代关系。而随着扫地机器人市场进入高速市场渗透期,产品将更加多元化,这两种技术未来将在应用场景上各有区分。
二、双路径布局导航技术,狠抓产品细节和功能体验
科沃斯是目前业内产品系列最全的企业,其产品涵盖了低端的随机碰撞式以及中高端导航机器人,技术路线也覆盖了LDS和VSLAM两大主流路径,是业内唯一覆盖两大方案的厂商。科沃斯凭借在行业深扎20多年的经验,在两大导航技术上的基础上,开发了更多细致的产品功能设计和创新式体验。
在LDS SLAM导航方面,科沃斯在业内也取得了不少成就。应用LDS SLAM的扫地机器人会有一大痛点问题,即激光雷达模块会在机身上形成凸起,增加扫地机器人的高度。这对于需要钻入不同家居设备底部进行清扫的扫地机器人来说是不利的。

▲科沃斯扫地机器人DEEBOT T5
科沃斯凭借在产业链多年的深厚积累已能够做到将搭载激光雷达模块的扫地机器人产品厚度降低到业内最低水平,同时,在激光雷达传感器成本控制上也是目前业内做的最好的。比如在地宝T5上,科沃斯在搭载了LDS和超大水箱的情况下,将产品厚度做到了9.3cm,是业内同级别产品中最薄的。

▲科沃斯扫地机器人DEEBOT DJ35
2013年科沃斯开始在VSLAM上发力,如今已经推出了多款经典产品。2018年科沃斯推出了全新的视觉导航产品地宝DJ35,首次搭载科沃斯全新Smart Eye视觉导航技术以及科沃斯蓝鲸清洁系统2.0。利用摄像头传感器对立体空间进行视觉捕捉,提取特征点,配合SLAM算法,实现可视化全局规划清洁,覆盖率更高。
科沃斯也在细致地打磨产品品质,在各个细节上提升产品品质和用户的体验,并且给用户提供了非常丰富的个性化选择。比如科沃斯的Smart Navi2.0系统,基于LDS传感器等组件,可以360度全方位识别家居环境信息,配合升级的SLAM算法,使扫地机器人能够同时执行建图、户型识别、路径规划和清扫工作。
科沃斯还基于App控制在该系统中创新式开发了众多功能,如断点续扫、重定位续扫、分区清洁、划区清洁、设置虚拟区/拖地禁区等,成为科沃斯扫地机器人在同类产品竞争中具有的重要优势。
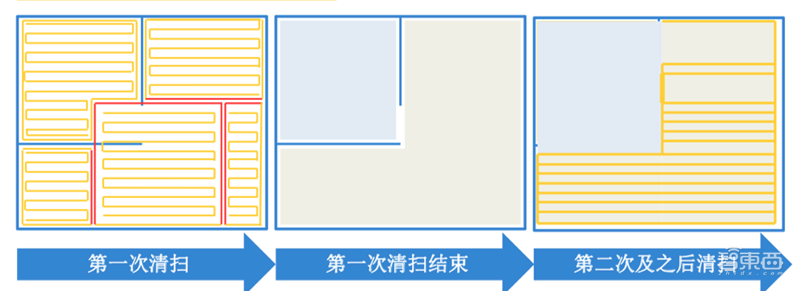
▲分区清扫逻辑图
举例来说,科沃斯很早便在LDS规划方案中加入了地图分区功能,其方案能够直接根据图上的分区信息逐一清扫各个区域,减少进出统一个房间的次数和在统一个房间内的沿边次数。
在小范围清扫方面,科沃斯的解决方案让用户只需要在手机上,使用自定义功能定义待清扫点及其范围大小,就可以实现精准高效的小区域清扫。
在传统方案中,如果在清扫过程中搬动机器人,会造成地图丢失。科沃斯建立了动态重定位功能,可以让机器人在新位置小范围移动后,判断自身所处位置,根据定位信息回复之前预存的地图并进行清扫。
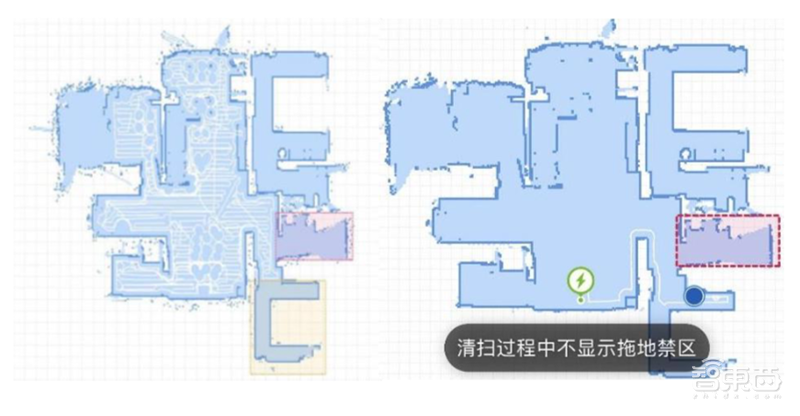
▲虚拟墙和虚拟禁区功能
同时,Smart Navi2.0还支持地图的实时更新,如果用户上次清扫时把某个房间门关上了,但这次还需要清扫该房间,机器人可以识别到上次清扫时未发现的新区域,直接纳入到已有地图中,并进入该区域清扫。地宝系列还可以通过App设置虚拟墙和虚拟禁区,当用户不想要清扫厨房或者其他区域时,可以使用此功能。
值得一提的是科沃斯是业内第一家具有地图自动感知记忆功能的厂商,仅在机身内部最多可记忆3张地图。当用户进行场景切换时,比如将扫地机器人从一楼挪到二楼,机器人会自动对场景进行识别,进入新地图模式。
这些功能虽然看起来细小、琐碎,但无一不是用户在清扫家庭场景中实实在在存在的问题。从如此细分的方案中,我们可以看出科沃斯真正从用户使用角度出发,将不同的需求分割成精准的问题,并提出针对性的解决方案。
而这与科沃斯在导航建图技术上的深厚积累是紧密相关的,正是凭借了在LDS SLAM和VSLAM双路导航技术上的全面布局,科沃斯才能在快速洞察用户精细化需求后,快速推出解决方案并实现产品化。
三、追求极致体验,科沃斯为扫地机器人注入AI新动力
目前,LDS SLAM与VSLAM两种导航方案可以很好地满足用户的日常需求,而为了进一步提升用户的体验,科沃斯创新式地将AI技术引入到产品中。
2019年一开年,科沃斯推出的新产品DG70,就搭载了AIVITM人工智能和视觉识别系统,让扫地机器人具有了物体识别能力,能够识别并判断家庭场景中的电线、鞋子、布等几大类别产品,并提供不同的清扫策略。科沃斯还将继续扩展物体识别种类,利用软件更新的方式对产品进行升级。
科沃斯曾提出了让机器人从“工具”到“管家”再到“伴侣”的角色路径。为了实现这一目标,科沃斯在人工智能领域也在持续投入和布局。
在人才培养方面,科沃斯不仅与南京大学成立了联合实验室,还在2018年7月成立了南京人工智能研究院,致力于“人工智能+机器人”研究。此外,科沃斯还在致力于建设机器人互联网生态圈,搭建人工智能平台的核心技术和基础设施,为提升家庭服务机器人产品在环境识别、人机交互、深度学习等智能化程度而努力。
毋庸置疑的是人工智能技术将给服务机器人带来更多的技术革新,这已经是目前行业公认的发展趋势。随着人工智能技术的进一步落地,服务机器人产品将在原有基础上,增加更为智能的产品能力和丰富的产品体验。
结语:扎根行业20年,科沃斯以技术撑起扫地机器人极致体验
作为国内扫地机器人入局最早的企业,科沃斯已深扎家庭场景20余年。在这个过程中,科沃斯以扎实的导航等技术功底,着眼细节,不断为用户带来实用、贴心的创新产品。
进入2019年,科沃斯又将真正的人工智能技术加入到产品设计中,再一次刷新扫地机器人极致体验的上限。在科沃斯的推动和带领下,扫地机器人行业也将迈向以技术驱动的,品质不断升级的新时代。
