







智东西(公众号:zhidxcom)
编 | 王颖
导语:越来越多的研究人员开始模仿生物特性设计机器人,最近国内外两所大学研究人员发表在ICRA的两篇仿生机器人论文引起了外媒的注意, IEEE Spectrum对这两种机器人做出了详细介绍。
智东西7月1日消息,据IEEE Spectrum报道,近日,在机器人技术领域最有影响力的ICRA国际会议上,两篇仿生机器人论文引起了广泛关注。论文中提到的鱿鱼机器人和扇贝机器人分别使用喷气和喷水的方式获得动力,彻底摆脱了电力,用更环保的方式为机器人提供动能。
据了解,这两篇论文《具有柔软变形鳍和臂的鱿鱼状水上飞行器的设计和实验》和《机器扇贝: 灵感来自双壳类的游泳机器人》分别来自北京航空航天大学和瑞士联邦理工学院。两所大学的研究人员在今年5月的在蒙特利尔举行的ICRA 2019上分别展示了他们研发的新型仿生机器人。
接下来我们可以根据IEEE Spectrum对这两款仿生机器人的详细介绍,一起了解机器人技术如何与生物特性相结合,研发出使用环保动力的仿生机器人。
一、鱿鱼机器人使用喷气动力前进
大多数水下机器人获得动力的方式分为两种,一种是螺旋桨,一种是鳍。北京航空航天大学的陶刚、杨兴邦、苏浩红、江步辉、陈灵坤、王天苗和梁建红受到鱿鱼的启发,研发出了一个喷气动力的鱿鱼机器人。
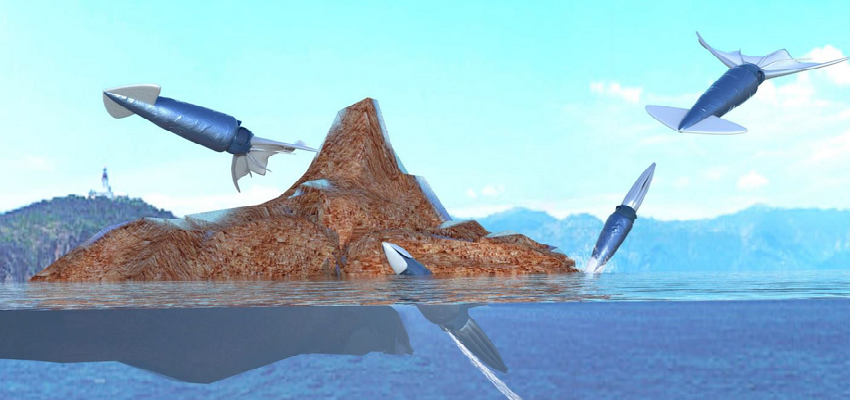
真正的鱿鱼通过喷水的方法,利用水射流推动自己前进,这种方式不仅速度极快,而且动力足以使一些鱿鱼能够跳出水面,甚至还能通过在空中的持续喷射实现短时间的受控飞行,鱿鱼在空中的“游动”速度是在水中速度的两倍,每秒游动距离可达其身长的50倍。
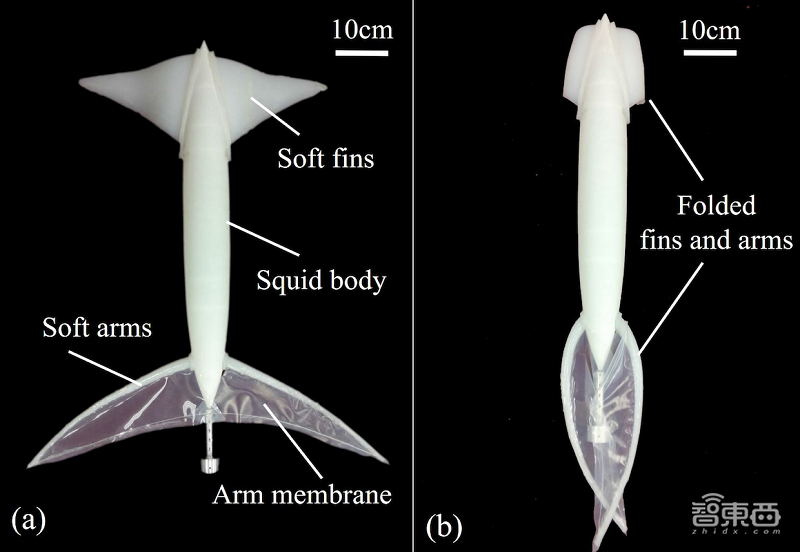
北京航空航天大学研究团队研发的鱿鱼机器人主要通过压缩空提供动力,把压缩空气储存在“鼻子”的圆柱形容器里,鱿鱼触须由气动执行器控制。当机器人想要在水中移动时,气动执行器会打开一个值,释放出适量的压缩空气,这些空气会产生足够的推力,把鱿鱼机器人射出水面。
鱿鱼机器人可以通过喷气动力跳跃10米到20米的距离,但目前它只能发射一次喷气。研究人员正在计划用密度稍大的气体代替压缩空气,比如液态二氧化碳,这样可以延长喷气时间,实现多次跳跃。
二、扇贝机器人使用水流动力前进
瑞士联邦理工学院的Jamie Paik领导机器人实验室研发了一个名为RoboScallop的扇贝机器人。这款机器人的两个外壳被柔韧的弹性膜包裹,通过一个铰链连接成整体。
真正的扇贝通过打开和关闭外壳时,从它们身体背部喷出的水柱推动自己前进。
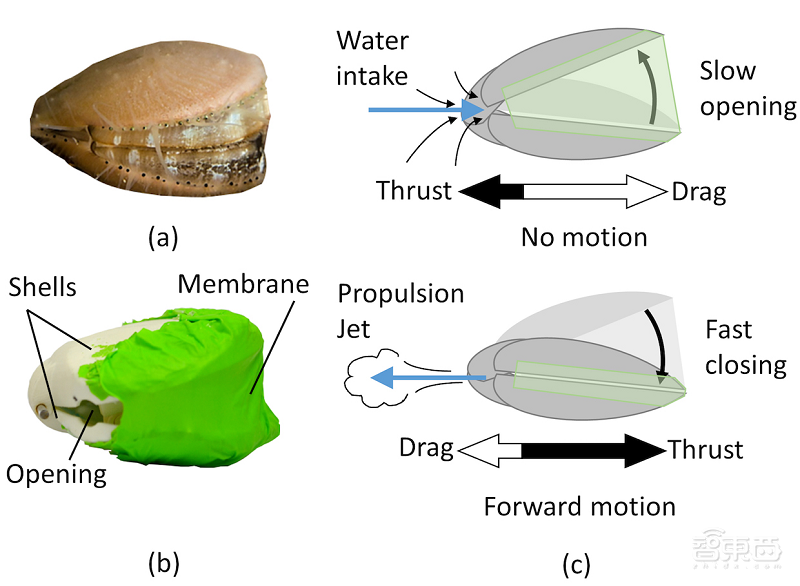
扇贝机器人循环的打开和关闭外壳产生水流推进游动,当机器人的外壳打开时,水流通过铰链后部的开口进入内部,当外壳关闭时,水被挤出,推动机器人前进。
Jamie Paik介绍,扇贝机器人将水吸入后会立即喷出,能够防止污染。扇贝机器人重量仅有65克,外壳的开关频率刚刚超过2.5Hz,移动速度为16厘米每秒。
真正的扇贝可以通过两边喷水量的不同掌握方向,但扇贝机器人还不能改变方向。Jamie Paik表示RoboScallop将很快能够实现改变方向的功能,他还说道“机器扇贝本身甚至可以兼做一个夹钳,据我所知,这不是真正的扇贝所能做到的。”
瑞士联邦理工学院机器人实验室的Jamie Paik表示,RoboScallop机器人有很高的安全性,即使在运行过程中有人触碰也不会发生危险。
结语:仿生机器人发展前景广阔
IEEE Spectrum介绍的这两种仿生机器人分别由北京航空航天大学和瑞士联邦理工学院的研究团队研发。向我们展示机器人技术发展的同时,也证明了仿生机器人的研究已经成为了国际关注的领域。
两所大学的研究人员通过观察鱿鱼和扇贝的游动方式,研发出了使用环保动力的新型仿生机器人,在机器人动力系统的研究方面取得了很大进展,提供了除电力外的新型供能方式。仿生机器人模仿生物特性,掌握新技能,在机器人领域进行新尝试,未来或许还有更广阔的发展前景。
原文来自:IEEE Spectrum
