







智东西(公众号:zhidxcom)
编 | 王颖
导语:波士顿动力的Atlas机器人能能像人一样行走和跳跃,最近,Atlas的能力再次进阶,不仅能在崎岖的道路上平稳前进,还能进行自主导航。
智东西7月8日消息,近日,IHMC(美国人类与机器认知研究所)公布了他们最新开发的机器人自主导航系统,并应用在了波士顿动力的Atlas机器人上,帮助Atlas在DARPA(美国国防部高级研究计划局机器人挑战赛)中获得了第二名。
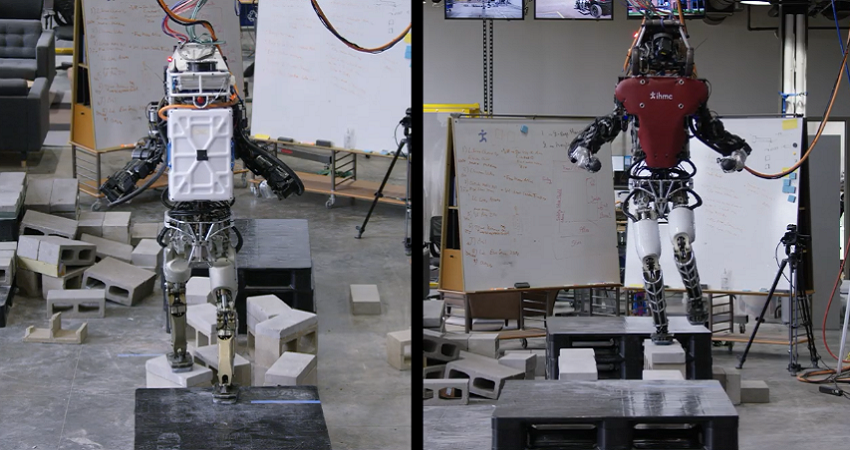
应用了自主导航系统的Atlas,能够通过自主导航,在崎岖的路上找到最佳的行走方案,像踩在梅花桩上一样越过障碍,平稳前进。
目前,应用了自主导航系统的Atlas在狭窄道路的自主导航成功率为50%,在崎岖道路的导航成功率为90%。这套自主导航系统已经应用在了波士顿动力的Atlas机器人和美国宇航局开发的 Valkyrie机器人上。
一、机器人自主导航,灵活规划路径
IHMC的研究人员表示,他们通过研究动物的腿部运动,分析保持稳定的方法。通过一系列的算法研究,机器人自主导航系统能够帮助机器人迅速识别道路环境,在崎岖狭窄的路上平稳前进。
自主导航系统通过传感器识别环境,创建环境模型,提高机器人的路径规划能力,灵活的应对路径变化,避开障碍物。
系统通过算法对每一步的运动进行分析评估,找到最佳的移动位置,通过不断地路径检查进行调优,在遇到未感知到的障碍后,机器人还可以原路返回,从起点重新规划新的行进路线。

人形机器人的一大挑战是进行双足行走,IHMC的机器人自主导航系统,能使机器人在不同地形中保持平衡,有效的处理外部干扰,在崎岖地形完成高难度的行走挑战。IHMC还将这种自主导航系统应用到了无人地面车辆(UGV)、无人飞行器(UAV)中。
二、Atlas在机器人挑战赛中获第二
DARPA机器人挑战赛,是一项旨在提高地面机器人应对灾害能力的国际竞赛。IHMC在DARPA竞赛中使用了波士顿动力的Atlas机器人,并获得了第二名的成绩。
目前,他们的研究重点是与美国宇航局的联合探索项目,将机器人自主步伐规划系统应用在美国宇航局的人形机器人Valkyrie上,远程操作类人机器人来完成所有的工作。
IHMC的研究人员为这种机器人系统的实际应用,设计了几种不同的机器人下肢装置,可以用来协助脊柱瘫痪患者行动、增强健全人士运动力量,以及宇航员的太空站行走训练。
结语:自主导航机器人将有广泛用途
双足类人机器人能够更灵活的进入各种工作环境,IHMC开发的自主导航系统能够实现机器人在障碍环境中找到最佳路线,并平稳前进。
机器人自主导航系统的路径规划能力,和维持机器人平衡的能力,能够应用在执行不同工作的机器人中。比如,救灾机器人和无人驾驶汽车,自主导航能力将在复杂的地形中发挥巨大作用。
原文来自:IHMC

最新评论