







智东西(公众号:zhidxcom)
编 | 王颖
导语:麻省理工学院研发了一种新系统,能自动设计和3D打印机器人部件,可以收起3D打印的睡莲花瓣,还能在不同角度展示不同画作。
智东西7月22日消息,昨天发表在Science Advances的一篇论文中,麻省理工的研究人员介绍了一种能3D打印机器人部件的系统,这种系统能够通过定制的3D打印机制作驱动器,当驱动器角度发生变化时,展示出两种不同的画作。
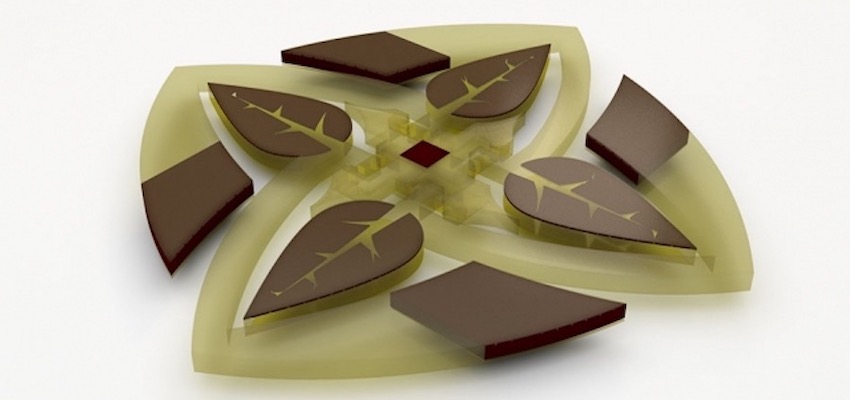
为了演示这一系统,研究人员还用3D打印技术打印了漂浮的睡莲,花瓣上安装了一系列驱动器和铰链,这些驱动器和铰链可以随着磁场在导电液体中流动而使花瓣折叠起来。
一、驱动器控制角度展示不同图像
该系统采用灰度图像样本作为输入,驱动器在平放时展示出的是一副梵高的肖像,当它被激活倾斜一个角度时,又可以描绘出Edvard Munch的画作《呐喊》。
它基本上是在执行一个复杂形式的试错,有点像重新排列组合魔方,在这种情况下,大约550万个三维像素,或者说“体素”进行迭代的重新配置,以匹配图像并满足测量的角度。
驱动器由三种不同材料制成,每种材料有不同的明暗颜色和特性,比如柔韧性和磁化强度,可以根据控制信号控制驱动器的角度。
定制的3D打印机通过逐层将正确的材料放入正确的体素中来制造驱动器。
软件首先将驱动器的设计分解成数百万个体素”,每个像素都可以填充任何一种材料。然后,它运行数百万次模拟,用不同的材料填充不同的体素。最终,它落在每个体素中每种材料的最佳位置,从而在两个不同的角度产生两个不同的图像。
二、光线追踪技术调整色调明暗
新的3D打印技术现在可以使用多种材料来创建一种产品,也就是说可以通过多种材料的不同性能进行各种组合,以找出最佳结构。
研究人员首先定制了三种聚合物材料,这些材料具有构建驱动器所需的特定属性:颜色、磁化和刚性。
最后,他们生产了一种近乎透明的刚性材料,一种用作铰链的不透明柔性材料,以及一种响应磁信号的棕色纳米粒子材料,并将所有特征数据插入属性库中。
最初,系统从属性库中随机的将不同材料分配给不同体素,进行模拟运行后,系统会产看这种排列是否以一定角度描绘了两个目标图像。如果没有,系统会收到一个错误信号,这个信号会对哪个体素需要被改变做出提示。例如,在施加磁场时,在棕色磁性体素周围添加、移除和移动磁性体素会改变驱动器的角度。同时,系统还必须考虑如何调整这些棕色体素影响图像显示。
为了在每次迭代中计算驱动器的外观,研究人员采用了一种名为“光线追踪”的计算机图形技术,该技术模拟光与物体相互作用的路径。模拟光束穿过每一列体素的驱动器,不同的材料序列在水平或成角度时发出不同的灰色阴影。
例如,在驱动器是平的时候,光束可以照射在许多棕色体素的色谱柱上,产生暗色调。当驱动器倾斜时,光束会照射在未对准的体素上,棕色体素可能会偏离光束,而更清晰的体素可能会移动到光束中,产生更亮的色调。
三、“按需喷墨”确定材料体素位置
为了制造驱动器,研究人员定制了3D打印机,使用了一种叫做“按需喷墨”的技术。将三种材料的纸盒连接到印刷头上,通过单独控制的数百个喷嘴,3D打印机将30微米大小的指定材料喷射到各自的体素位置上。液滴落在基板上会随即凝固,通过这种方式,打印机逐层的构建对象。
该论文的第一作者Subramanian Sundaram博士说:“我们的最终目标是自动找到任何问题的最优设计,然后利用我们优化设计的输出来制造它。”
四、新系统可用于制造仿生机器人
随着角度发生变化的图像展示了这个系统可以做什么,针对外观和功能进行了优化的驱动器还可以用于机器人技术中的仿生学。例如,有研究人员正在设计具有驱动器阵列的水下机器人皮肤,旨在模仿鲨鱼皮肤上的齿状物。
驱动器在形状上做出改变,以减少阻力,水下机器人可以更快、更安静的游泳。这些驱动器覆盖在水下机器人皮肤表面,可以优化阻力和转向效率。
如今的机器人驱动器正变得越来越复杂,根据应用程序的不同,它们必须针对重量、效率、外观、灵活性、功耗以及其他各种功能和性能指标进行优化。通常,研究人员回手动计算这些参数来找到最佳设计。
结语:新系统将为大规模结构提供基础
Sundaram表示,他们的工作可以作为设计飞机机翼等更大结构的基础,他们的研究人员已经开始将飞机机翼分解成更小的像素块,优化重量、升力和其他设计指标。
虽然麻省理工的新系统现在还不能打印机翼这种更大结构的东西,但已经是朝着大规模结构的设计迈出了第一步,未来该系统获奖帮助人类完成人工无法完成的任务。
原文来自:Robohub
