








智东西(公众号:zhidxcom)
文 | 轩窗
2019年7月8日,为期7天的RoboCup2019(机器人世界杯)比赛在澳大利亚悉尼正式落下帷幕。在比赛中,来自中国的火神队从全球40多个国家,170多所科研机构和高校团队中脱颖而出,斩获人形组三项大奖:AdultSize的Technical Challenge技术挑战赛亚军、Drop-in比赛亚军,以及2VS2足球比赛季军。
可以说,火神队代表着中国人形机器人研究的最顶尖的水平。这一团队集结了目前中国人形机器人前沿技术研究中两支重要力量——代表高校的清华大学和代表企业的优必选科技。
智东西了解到这支团队的领导者正是在仿人机器人步态控制及无人驾驶自行车领域享誉盛名的赵明国教授,他不仅是清华大学自动化系副研究员、机器人控制实验室主任,同时担任优必选科技人形机器人首席科学家,和优必选科技人形机器人团队一起攻克人形机器人研究中的一个又一个难题。
上周,智东西受邀来到了优必选科技北京研究所,在这里我们与赵明国教授以及优必选科技北京研究所核心团队成员进行了深度交流。优必选北京研究所正是参加此次RoboCup比赛的核心团队,负责机器人在感知、定位、决策、运动、步态等方面研究。现在就让我们一起来揭开优必选科技捧回RoboCup奖杯背后的秘密吧。

▲优必选人形机器人首席科学家 赵明国教授
一、严苛的Robocup挑战赛,优必选科技的取胜法宝
人形机器人一直是机器人研究中最前沿的领域。
最早期的机器人诞生于上世纪60年代,随后人类对机器人的探索就不断在升级。为了检验人工智能和机器人的性能,学者们不断设定新的技术检验标准。90年代之前,与人类进行国际象棋博弈一直作为人工智能系统研究的桂冠。
自1997年IBM的人工智能系统深蓝首次在国际象棋比赛中战胜人类后,学者们一直在思考,该设定哪一指标来引领人工智能和机器人下一阶段的研究方向呢?经历了几十位专家的激烈讨论,最终,足球比赛成为专家们认可的方向。于是,RoboCup挑战赛诞生了。
RoboCup挑战赛设定的目的是通过一个易于评价的标准平台促进人工智能与机器人技术的发展,目标是在2050年前后能组建一支机器人足球队战胜当年的人类世界杯冠军。
赵明国教授告诉智东西,相比于国际象棋这种规则清晰的比赛项目,让机器人踢足球项目中信息具有着不确定性,需要在现有人工智能和机器人技术上实现很多突破才能完成。
“RoboCup是一个对抗性的比赛而不是一次展示、一场表演。比赛有自己的规则,要求机器人必须完全自主运行,整个过程中需要在有限的场地中,完成物体识别、定位、决策等一系列任务。你完全不知道对手会采取什么样的行动,很可能出现在单独训练中表现很好,但在赛场上表现不佳的情况。”
RoboCup将真实应用中需要的技术进行了抽象,比如动态环境、噪声、随机性等问题。比赛的规则一年比一年严苛,不断向人类足球比赛方式靠近。说到今年比赛最大的难度,优必选科技运动控制算法高级工程师董浩表示,今年的比赛场地增大了,环境范围的倍增对机器人视觉系统和决策系统提出了挑战。
简单讲,机器人在场上需要在有限的时间内找到球,并且顺利地够到球。一场比赛的时间仅有20分钟(上半场10分钟,下半场10分钟)。董浩补充说道,比赛规则中是不能够使用无线通信的,所以机器人不能调度云端的内容和算力。虽然,RoboCup鼓励使用语音技术,用语音命令机器人,但由于现场环境复杂,利用现有的语音识别技术实现难度很大。

由于比赛中不可以使用具有发射性的定位方案,如RGBD摄像机、激光雷达等具有发射装置的测距传感器,参赛团队必须使用AI视觉技术,并且AI运算全部在本体的嵌入式平台上进行,不可以接入到云端或者连网。优必选科技视觉及SLAM算法高级工程师罗茜介绍,比赛中优必选科技采用了双目视觉方案,可以实现对赛场上8种物体的识别,包括球、线、对手、球柱等。
这种技术属于机器人视觉范围,是一种动态的识别,与物体识别、人脸识别这些计算机视觉技术有很大不同。赵明国教授进一步解释说,这种物体识别和识别精度无关,更重要的是要快速反应,当球过来的时候能够踢得到。物体识别影响着机器人后续的决策和行为,为了准确判断移动中的球的位置,需要对球进行运动建模,对其运动进行分析和估计。
优必选科技&清华大学火神队在比赛中,基于嵌入式平台可以达到每秒30帧的图像处理速度,而在比赛之外,最高可以达到每秒70-80帧的处理速度,这对硬件平台要求非常高。赵明国教授在采访中也指出硬件的重要性,他说道:“硬件是制约服务机器人发展的关键,即使人工智能技术再领先,如果硬件平台发展缓慢,人工智能技术也没有应用的基础。”
优必选科技高级机械工程师李海雷提到,在RoboCup比赛中,优必选科技的机器人硬件平台采用的是第一代Walker,并根据比赛的需要做了针对性的方案设计,在保证必要功能的前提下,最大限度减轻硬件负担。
当智东西问到,参加RoboCup最大的收获是什么时,赵明国教授说道:“除了争取赢得冠军外,我们最核心的目的是检测在技术方向上的进步或仍然存在的不足之处。今年主要是验证机器人平台在行走和控制两方面的技术,能够满足未来3-5年的需求。”
二、赵明国——优必选科技人形机器人研发的幕后大神
行动能力是人形机器人非常重要的能力。一直以来,在机器人的前沿技术研究上,美国、日本、欧洲等国家和地区由于起步早,拥有先发优势,而中国则相对落后。国内从事人形机器人前沿技术研究的学者也寥寥无几,能在国际上取得突破性成绩的更是屈指可数。
赵明国教授在仿人机器人步态控制上拥有近20年的研发经历,2003年赵明国教授进入清华自动化系工作,全身心投入到仿人机器人步态控制及无人驾驶自行车的研究中。
2007年基于被动行走原理,赵明国教授提出了“虚拟斜坡行走”方法,并在Stepper2D样机上实现了4.48腿长/秒的双足机器人行走速度记录,使双足机器人行走可以与奥林匹克竞走运动员的速度相当。
除了“虚拟斜坡”动力行走方法,2012年赵明国教授还提出了另外一种方法——“髋部弹性驱动”,让双足机器人获得高稳定性和高能量效率。
赵明国教授和RoboCup的缘分可以追溯到2004年,2004年10月和12月,在两场国内足球机器人比赛中,赵明国教授及其团队就分别斩获四腿组冠军。在采访中,赵明国教授告诉智东西,他最开始是从软件方面入手做初级的研究。随后的几年里,赵明国及其所带领的团队一直在积极参与RoboCup国际比赛,从未缺席过,并且成绩越来越好。
8年之后,赵明国教授带领团队参加RoboCup 2011年人形组AdultSize比赛,初次亮相就一举获得了季军。
就在赵明国教授一步步攻克人形机器人研究难题的同时,在中国深圳,人工智能与人形机器人企业优必选科技也开始了探索之路。
赵明国教授回忆到,他和优必选科技CTO熊友军是在2015年RoboCup合肥的一场比赛中正式见面的,在此之前双方也经常通过电话交流。赵明国教授回忆说,在当时国内做人形机器人的企业寥寥无几,而我们与优必选科技团队却有着相同的理想:未来要让智能机器人走进千家万户。
现在,赵明国教授作为优必选科技人形机器人首席科学家和优必选科技的人形机器人团队院在最前沿的人形机器人技术上进行探索,我们看到火神队在RoboCup中的精彩表现,其实只是他们研究工作的一部分。
当智东西问赵明国教授,在高校和企业做研发的区别是什么时,赵明国教授表示:高校更多的是关注探索前沿的工作,而企业则有更大的责任去实现技术的落地应用,优必选科技把人形机器人作为人工智能的一个载体,希望实现技术和产品的落地,并应用于家庭。而企业的一大优势是可以在某些方面集中人力和资金,进行系统性的研发。
三、优必选科技人形机器人未来研发思路
从全世界范围来看,目前出现的最知名、运动能力最强的人形机器人主要有波士顿动力Atlas、本田ASIMO、俄罗斯Fedor以及优必选科技的Walker。
目前Atlas还处于实验室前沿探索阶段,距离商业落地还很远,波士顿动力正在大力推动四足机器人Spot的商业化,至今还未公布具体进展。本田ASIMO团队虽然起步较早,但仍在进行商业化探索。俄罗斯的Fedor则是军事项目,距离商用更遥远。
由于目前整个行业正处于弱人工智能阶段,技术尚不成熟,人形机器人落地难上加难,对优必选科技亦是如此。不过,为了实现让智能机器人走进千家万户的梦想,优必选科技采用 “两条腿走路”即COO养CTO的战略。
具体来讲,这一战略分为两个方面。首先,尽可能将现有技术实现产品商业化落地,在教育、娱乐、家庭、商用服务、安防等多个领域实现落地,推出相应的产品实现销售,最重要的是能将研究成果迅速转化成产品进行市场化验证,收集来自用户的行为反馈,从而为接下来的研究提供最有价值的参考。
其次,坚持布局最前沿的技术。优必选科技从机器人领域核心技术伺服舵机入手,积累了一系列的核心技术。目前优必选科技已经研发出高性能伺服驱动器及控制算法、多关节运动控制算法、面向服务机器人的计算机视觉算法、智能服务机器人自主导航定位算法、机器人操作系统应用框架ROSA等多项人工智能机器人核心技术,建立“硬件+软件+服务+内容”的机器人生态圈。
在研发体系方面,优必选科技已经构建起三层研发体系:第一层是产品团队;第二层,在产品团队之上,公司有自己的研究院,专注核心技术研发,产品团队采用的核心技术基本都来自研究院;第三层,在研究院的基础上,优必选科技还有一个团队专注于人工智能和机器人更长远的前沿技术研发。优必选科技在清华大学、华中科技大学设立了智能服务机器人联合实验室,在悉尼成立了人工智能中心。当上层的研究院有了技术突破,就会往下一层转移。技术一旦成熟,就会应用到产品。
产品研发由位于深圳总部的团队负责,前沿技术落地到产品上的成本控制问题也是由他们操盘。前沿技术研发主要分为两个方向,一是机器人行动能力的研发,用赵明国教授的话说,就是解决机器人基本的走路问题,另一个则是人工智能技术的研究,比如智能语音、物体识别等。
目前,赵明国教授和优必选科技Walker团队专注于双足机器人运动控制技术研究。从2015年Walker立项到2018 CES上推出双足机器人Walker,再到2019 CES上推出完全具备人形形态的大型仿人服务机器人Walker新一代,Walker在三年时间内,已经初具人形机器人的基本技能。
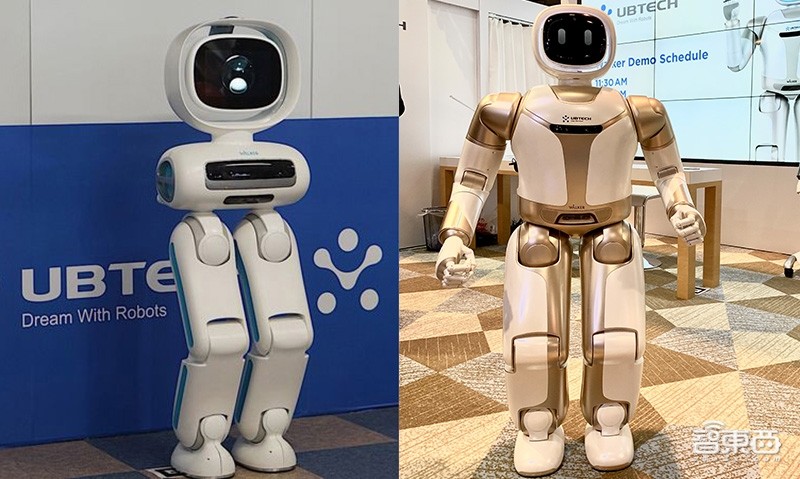
▲左为第一代Walker,右为Walker新一代
赵明国教授在采访中表示,优必选科技未来将在Walker上持续迭代,目前Walker已经具备了人形机器人的初步形态,未来会在软件和性能上做进一步的迭代,让机器人更轻量化,成本更低,在设计、材料、原理方向上都会向着让人形机器人落地家庭应用不断努力。
相比于波士顿动力和本田,优必选科技的人形机器人战略更加开放。优必选科技创始人、董事长兼CEO周剑曾提到优必选科技要把机器人本体做好,未来要基于这一本体建立机器人生态,也希望更多的开发者能基于优必选科技人形机器人平台开发更多的功能,共同推动人形机器人的商业落地。
赵明国教授表示,在机器人领域,总的来说分为感知、定位、决策、运动、步态等几个技术模块,方法都是通用的。首先要把业内已知的方法都探索一遍,才知道不同方案的优势在哪里。
以步态算法为例,赵明国教授告诉智东西业内有很多方案,模拟人是其中的一类方法。和波士顿动力Atlas踩“梅花桩”类似,优必选科技也尝试做了脚印步态识别,比如针对十步之内到达球进行决策,进行路径规划。赵明国教授指出,方法的基本原理都是一致的,但由于硬件不同,所以不同的方案需要进行调整。不过,赵明国教授也坦言,这种方法不一定是最好的,也不一定会一直采用。
“未来的优化方向,主要集中在让机器人的这些能力模块更轻、更好、速度更快,在硬件上建立一整套的系统方案,否则永远只能是Demo。”
赵明国教授认为,机会和实力都很重要。如果技术够硬,有长期的积累,当产品定义发生变化时,是可以快速跟进的。“这就是不同的积木组合,我们这样做的目的是要保证当行业前景明确时,我们的技术能领先对手半年,系统更稳定、性能更好。”
结语:人形机器人走入家庭的梦想已经初具雏形
RoboCup是人形机器人研发成果检验的重要比赛。此次,优必选科技能够和清华大学一起捧回RoboCup的奖杯,正是因为坚持不懈的研发和投入,以及像赵明国教授一样的在人形机器人前沿技术上苦心钻研的技术大牛的加入。
值得骄傲的是,中国的科研机构和科技企业正在以惊人的研发速度快速缩短和世界先进水平的差距,优必选科技让智能机器人进入千家万户的梦想已经初见雏形。
