







智东西(公众号:zhidxcom)
编 | 王颖
导语:超高速软体机器人被踩踏后仍能前进,体积小、速度快,比蟑螂还顽强。
智东西8月1日消息,清华大学和加州伯克利大学分校的研究人员开发了一种外形像弯曲的纸条的软体机器人Red stars,能以每秒20倍身长的速度移动,即使被踩踏也能继续前进。
Red stars通过电流导致的热塑性材料的伸缩产生移动,当电流穿过机器人内部的电极时,机器人背部会向上弯曲,在50毫秒内完成移动。比以往的软体机器人更胜一筹的方面在于,Red stars的有效载荷是自身重量的6倍,还能承受超过自身重量100万倍的压力,被压扁后还能继续爬行。
中美两所大学共同研发的新型软体机器人究竟有何过人之处呢?下面我们就来一探究竟。
一、Red stars机器人被踩扁也能继续爬行
软体机器人因为结构相对简单、成本相对较低越来越受欢迎。它们可以利用设计结构和制作材料本身具有的特性来移动自己并与环境互动。软体机器人没有刚性部件的约束,可以承受各种“虐待”。
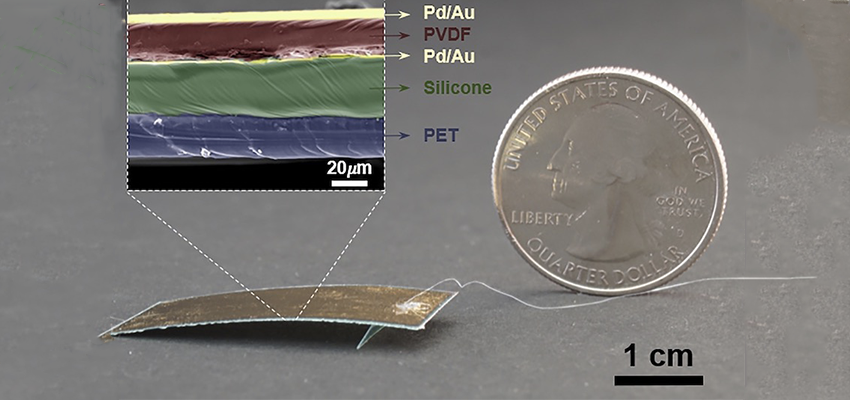
最新一期的《科学机器人》(Science Robotics)杂志,介绍了清华大学和加州伯克利分校的研究团队研发的新型软体机器人。Red stars机器人的外形看起来就像一张弯曲的纸条,每秒能移动自身20倍身长的距离,比以往的软体机器人更加“强壮”。
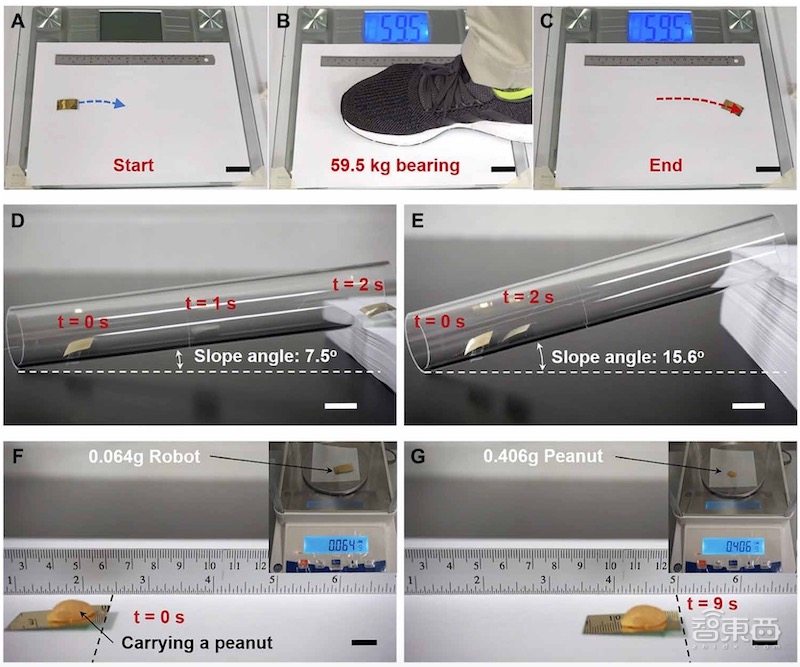
Red stars能够承受自身重量100万倍的压力,研究人员穿着网球鞋踩踏在身上,当压力移开时,它能继续爬行,尽管速度只有原来的一半。即使是爬上15度的斜坡,它仍然能够以每秒1个身体长度的速度移动。
Red stars的有效载荷是自身重量的六倍,可以背着一颗花生前进。但负重时,机器人的移动速度会降低6倍。研究人员还制作了一个两条腿的模型,通过在空中停留更长的时间,模型能够进行更快的移动。
下图显示了动物和机器人的运行速度与身体重量的关系:
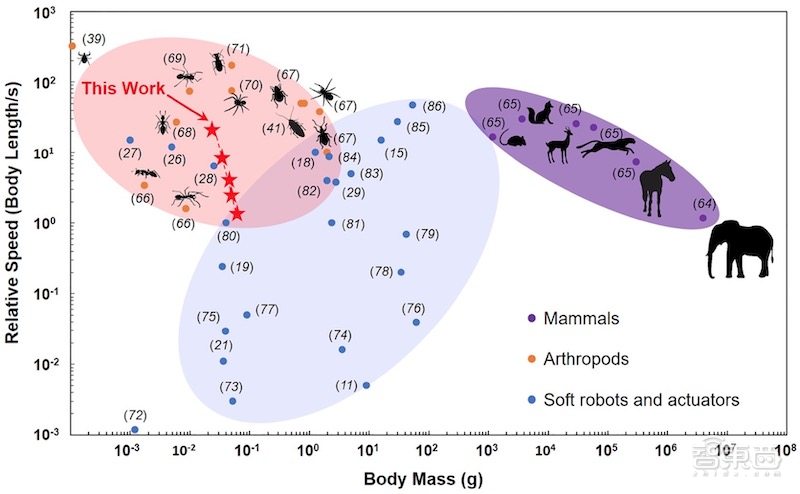
这个图表显示了一些哺乳动物(紫色区域)、节肢动物(橙色区域)和软体机器人(蓝色区域)与体重的相对运行速度。 对哺乳动物和节肢动物来说,相对速度与体重呈强烈的负相关关系,速度随体重的减少而增加。对于软体机器人来说,这种关系是相反的,随着体重的减少,速度会降低。而清华大学和加州大学伯克利分校的研究人员制造的小型软体机器人与活体动物类似,当体重减少时,速度就会提高。
图表左上角的数字39,是1916年在加利福尼亚的一块岩石下发现的一种微小的螨虫。这种螨虫的大小不到1毫米,每小时可以跑0.8公里,也就是每秒322个身长,这使它成为迄今为止地球上相对于体型而言最快的陆地动物。
相对于人类的体型来说,速度应该是每小时2000多公里。图表的左上角几乎所有的东西都是昆虫,它们的速度随着质量的减小增加。
图表中速度与质量比令人印象深刻的27号机器人,是来自UMD(马里兰大学帕克分校)的磁力驱动四足机器人,还有86号,是加州大学伯克利分校的3D打印机器人X2-VelociRoACH。
二、8伏电压下50毫米完成一次移动
机器人长3厘米,款1.5厘米,需要电子显微镜扫描才能看到其材料构成。研究人员把钯金电极夹在热塑层中,用粘合剂硅树脂与底部的塑料结构粘合。当低至8伏的交流电压穿过电极时,热塑性塑料会伸展和收缩,机器人背部弯曲时,底部的“脚”就会随之移动,从电流通过到完成一次移动仅需50毫秒的时间。
研究人员称,从技术角度讲,这个机器人是会跑的,因为它在运动过程中确实有一个短暂的空中阶段。
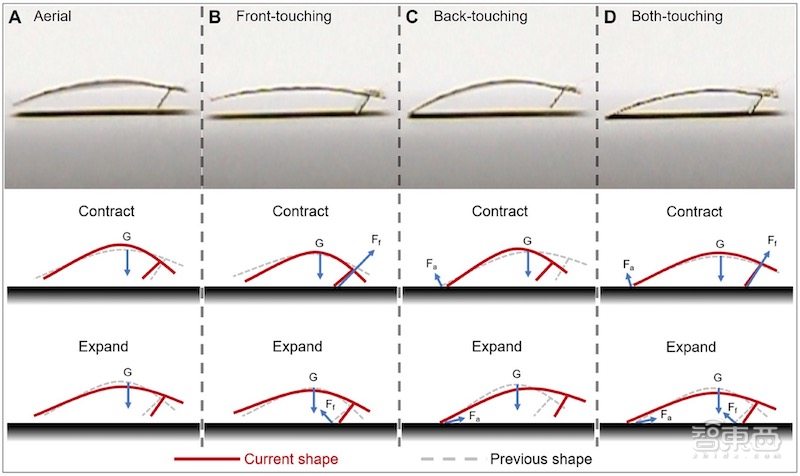
高速摄像机拍摄的照片显示了机器人收缩和扩张身体时的步态(A到 D)
结语:软体机器人未来可用于灾情勘查
虽然目前这种机器人还没有明确的用途,但清华大学和伯克利分校研究团队的成果确实令人印象深刻,其速度和坚固性在很大程度上是其他软件机器人无法比拟的。
驱动这种机器人所需的电压相对较低,我们或许可以期待无需充电的无绳版本的到来,如果机器人上能安装一些有效载荷内的传感器,实际应用可能很快就会到来。未来这种机器人也许可以用于环境探索、结构检查、信息侦察和救灾工作。
原文来自:IEEE Spectrum
