








智东西(公众号:zhidxcom)
编 | 王颖
智东西3月3日消息,今天美国国防高级研究计划局(DARPA)的“地下挑战赛”SubT Urban Challenge决赛结果出炉了。
美国宇航局喷气推进实验室、麻省理工学院、加州理工学院、KAIST、LTU以及包括Clearpath机器人公司和波士顿动力公司组成的CoSTAR团队获胜。
下一届SubT Tunnel Circuit赛事将在六个月后举办。目前,具体的比赛时间和地点尚未确定。
一、SubT挑战赛在废弃的核电站进行
DARPA地下挑战赛的城市巡回赛在西雅图以南约一个半小时路程的萨索普核电站举行。
这个核电站始建于1977年,建设完成80%的时候,政府决定不再投入资金,这个核电站也成了废弃项目。
现在,这个未完成的核电站所有权转移到了萨特索普,为了将老化的基础设施变为有用的东西,萨特索普将部分地方开放给电影摄制组进行拍摄,现在又为DARPA举办挑战赛提供了场地。
隧道和城市路线最大的区别在于隧道大多数是相互连接的长而直的通道,城市中却包含了各种大小不同的空间和分布在不同层次且相互连接的小房间。
SubT挑战赛由三条独立的线路组成,每条线路代表一个独特的地下环境: 隧道系统、城市地下和洞穴网络。
本次挑战赛的Urban Circuit部分已于上周四结束。

SubT城市巡回赛的获胜者是CoSTAR团队,该团队由美国宇航局喷气推进实验室、麻省理工学院、加州理工学院、KAIST、LTU以及包括Clearpath机器人公司和波士顿动力公司在内的工业合作伙伴组成。
排名第二的是卡内基梅隆大学的探索者团队,六个月前在上一届SubT Tunnel Circuit赛事中该团队夺得了冠军。下一届SubT Tunnel Circuit赛事将在六个月后举办。
二、通讯和场地温度成赛事大挑战
在隧道挑战赛中,团队沟通是一个巨大的挑战,但在城市赛道中,通讯似乎不是什么大问题。参赛团队使用可部署的网络节点建立了网状网络,机器人可以在通讯范围之外进行长时间的工作。
美国国防部高级研究计划局的项目经理Tim Chung说:“这次城市巡回赛是增强团队合作互动的机会,机器人专家们可以在一个区域内高度集中的释放热情和野心。”
核电站建筑内温度远低于室外,室外温度在华氏35度(约1.6摄氏度)左右,但里面感觉却像是25度(约-3.8摄氏度)左右。
赛事进行的另一个挑战就是场地的温度太低。因此,参赛团队的工作人员和机器人都无法在场内停留太久,比赛结束后立即转移到温暖的地方。
为了有效地进行测试,大多数团队需要比现场更多的专用空间进行环境测试。
CSIRO DATA61小组在当地的游乐场发现了一个室内马场。CERBERUS团队在距赛场20英里的地方找到了一个空置的购物中心。CoSTAR团队则在当地一家酒店的会议中心进行测试,巧合的是,正是Evan Ackerman入住的酒店。

CoSTAR团队还从波士顿动力借来了Spot机器人。
Spot在酒店的测试并不低调,CoSTAR团队清晨时会在酒店的走廊测试Spot,机器人砰砰砰的的脚步声几乎可以唤醒整个酒店的人。被Spot吵醒后,Evan Ackerman开车去了DARPA媒体日比赛现场。
三、参赛队伍各出奇招应对通讯、道路难题
在与参赛队伍的交谈中,外媒记者Evan Ackerman了解到,各团队为应对不同赛道环境对机器人做出了一些技术改进。
1.NCTU团队
来自台湾的NCTU团队采用了一些创意方法,他们最出名的机器人是“Duckiefloat”飞艇,六个月前在隧道赛道中遇到了一些穿越狭窄隧道的麻烦。由于知道城市赛道的通道会更加狭窄,NCTU在Duckiefloats周围建造了一个碳纤维框架,使机器人的侧面可以稍微挤压。
NCTU还使用了一种独特的方法,在其中一台Duckiefloats上增加了毫米波雷达,以替代机载激光雷达或RGBD相机。
NCTU还在开发一种移动式Anchorball它基本上是一个大型Sphero,内部装有许多联网设备,可以自行移动以优化信号强度。
2.NUS SEDS团队
NUS SEDS团队不小心烧毁了驱动机器人的两台车载计算机。他们紧急购买了一台笔记本电脑,然后3D打印一些支架,以将笔记本电脑连接到机器人的顶部并运行。
NUS SEDS团队还有一辆可以上下楼梯的履带车,但是无法通过海关不能参赛。
3.Explorer团队
Explorer团队在匹兹堡一家废弃的医院做了大量的测试,为了让结实的轮式机器人上下楼梯,他们从机器人的轮子上切下了很多块,以增加牵引力抓住楼梯的边缘。
虽然看起来并不复杂,但Explorer团队的负责人表示,这是他们经过14次迭代做出的最好修改。
4.MARBLE团队
MARBLE在他们的可下降无线中继器节点上改进了一个有电的扩展天线。这个网状网络节点将其天线向空中延伸了半米,以最大化信号强度。
一旦天线完全部署,其额外的高度确实可以显著提高其性能。
5.Robotika团队
基于他们在隧道赛道中的经验,Robotika团队认为隧道中没有太多的光线,因此他们带来了SubT上看到的光机比最大的机器人。
像许多其他团队一样,Robotika不断进行较小的硬件调整,以改善其机器人的性能并使它们对环境的适应能力更强。塑料保险杠可以防止机器人撞上墙壁,甚至翻车。
6.CSIRO Data61团队
CSIRO Data61团队在室内马场测试时,他们的一个大型履带式机器人不幸被一个绊住,为了逃跑,它烧坏了几个电动机。
CSIRO Data61团队没有备件,所以最便捷的方法让另一名队员带一些配件从澳大利亚赶过来。幸运的是新的配件被及时送来,他们得以参赛。
7.CERBERUS团队
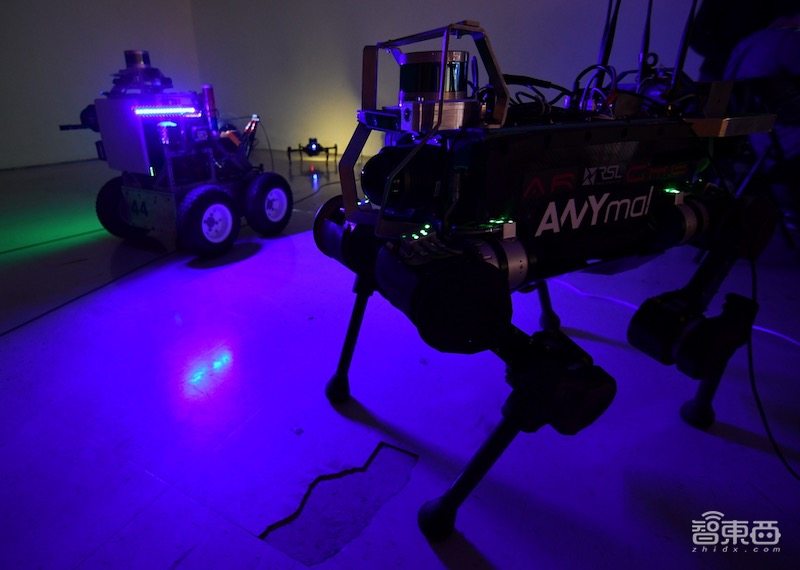
CERBERUS团队的测试区在一个空荡荡的商场里,距离萨特索普大约20英里。CERBERUS使用的是轮式车辆、耐碰撞的无人机和 ANYmal 腿式机器人。
CERBERUS在DARPA的一次简报中注意到,赛道中有一个几乎90度的转弯,这会阻挡放置在集结区的任何定向天线。
为了最大限度地扩大通信范围,他们开发了天线机器人,它没有感应能力和自主能力,而是被设计用来携带一个巨大的系留天线绕过第一个转弯。
另一个通信挑战是机器人经过楼梯后如何与它们交谈。CERBERUS希望有一种方法可以使网状网络节点沿着这些楼梯下降,以便能够与探索较低楼层的机器人进行可靠的对话。

他们最初的想法是将一个节点放入一个足球中,然后将其从登台区域踢出。但最终他们在沃尔玛发现了一些用于花艺布置的绿色泡沫半球,挖空了将它们取出,放在一个节点中,然后将整个东西用胶带包起来。通过添加系绳,可以将球中的节点从登台区域扔到楼梯间,并在系绳未落入正确位置的情况下与系绳一起恢复原状。
8.CoSTAR团队
CoSTARr团队带着一对来自波士顿动力公司的Spot四足机器人来到赛场,CoSTAR没有太多时间进行优化,Spot自己的传感器只负责执行低级运动计划。

CoSTAR团队提出了一种与CERBERUS团队可抛网络节点非常相似的解决办法,在泡沫球中嵌入可抛网状网络节点,可以反弹到楼梯间以扩展通信。
四、自费队伍获50万美金奖励,6个月后进行新赛事
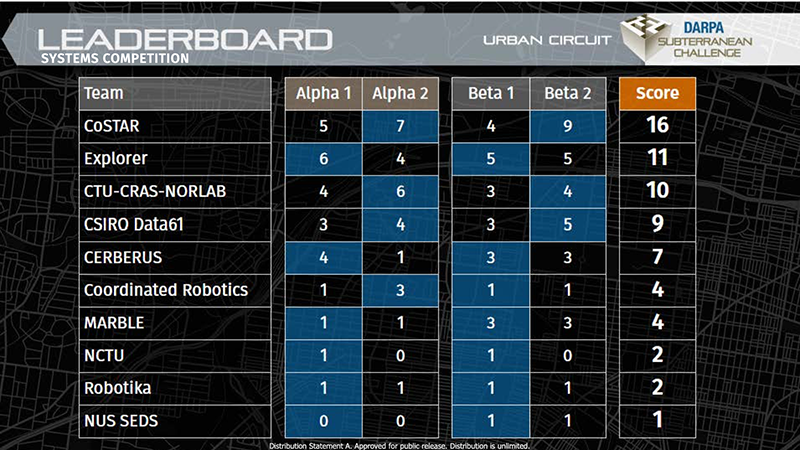
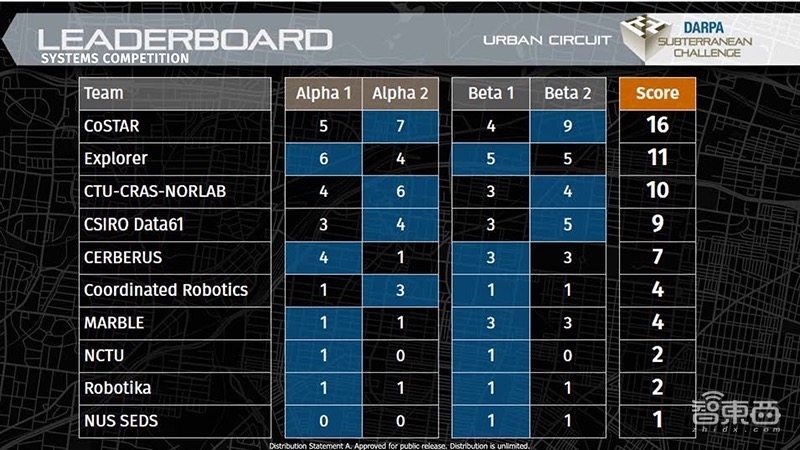
SubT Urban决赛中,CoSTAR取得了9分,Urban Circuit比赛中总共获得16分排名第一,比排名第二的Explorer高出5分。CTU-CRAS-NORLAB团队获得第三名,作为一个自筹资金(与DARPA资助相对)的团队,他们获得了50万美元的奖金。
六个月后,这些团队将再次参加SubT Cave Circuit挑战赛。
原文来自:IEEE Spectrum
