








智东西(公众号:zhidxcom)
编 | 董温淑
这项研究已于本周三发布在
论文链接:https://robotics.sciencemag.org/content/robotics/5/40/eaaz0492.full.pdf
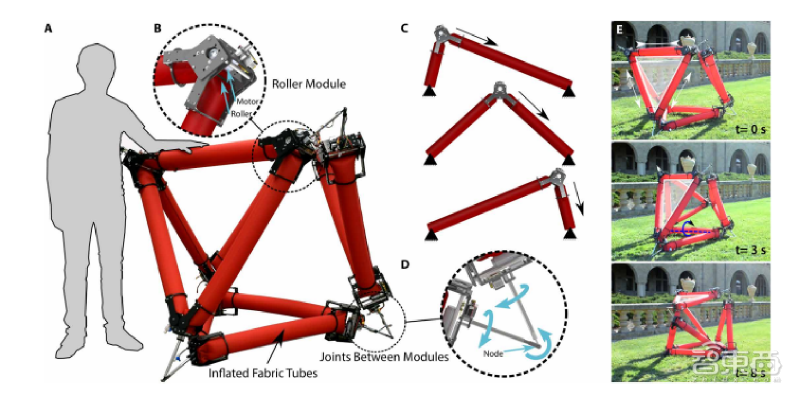
这款机器人主要由织物管和3个滚筒模块组成,滚筒模块包含机械滚筒和小型发动机两个部分。滚筒模块安装于织物管上,其中一个将织物管首尾相接,另外两个可在管道上移动,与织物管一起组成三角形。
使用时利用滚筒夹紧织物管,使其维持固定的形状。一旦需要机器人变形,则可利用小型发动机驱动滚筒移位,给织物管重新“塑形”。在滚筒移动过程中,机器人形状改变,但织物管的长度及其内部空气量保持不变。也有研究人员因此称其为“等周机器人”。
对于这款机器人的独特结构,斯坦福大学航空航天助理教授麦克·史瓦格(Mac Schwager)评价到:“让我感到兴奋的是,这款机器人实际上是由几个机器滚轴组成的集合体,他们通过协同运作来移动机器人和改变形状。这使其成为了一个适应性强而坚固的系统。”
二、移动灵活,能捡球,还能变身“形状显示器”
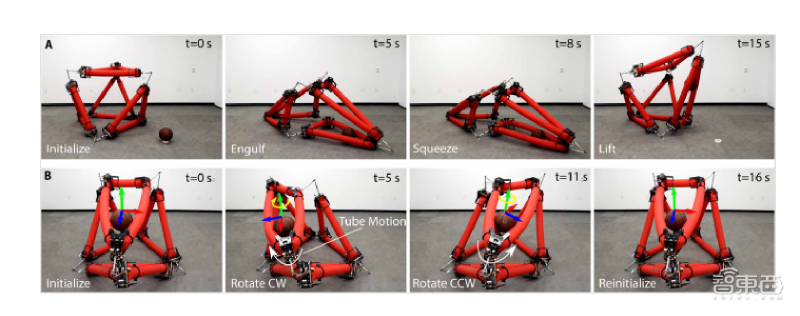
研究人员曾将几个机器人组合在一起,用发动机驱动其移动,最终成功操纵机器人捡起了一个球。此外,机器人还可以推动球向前滚动。这就说明此种机器人可以接近物体、捡起物体,再将其移动至特定位置。而这些操作对于夹钳机器人来说则很难完成,这也意味着软体机器人未来将有更多可能的应用场景。
1、太空旅行好帮手
研究人员认为这种机器人拥有易于收纳的外形,使用起来还很灵活,十分适合用于太空旅行。斯坦福大学机械工程专业的研究生扎卡里·哈蒙德(Zachary Hammond)认为,“在另一个星球上,它可以利用其变形能力穿过复杂的环境,挤过狭小的空间,跨越障碍物。”
在论文中研究者写到:“在太空漫游任务中,可以在发射前排空机器人气体,着陆后再充气,使其完成任务,这样就不必担心能源问题了。另外机器人的柔软特性也使其更加强健,适用于复杂地形,也可用于执行情况未知的任务。”
2、与工人协同工作
这种机器人同样适合工业使用。例如当工人用螺栓装配零件时,可利用机器人来固定零件。
3、教学交互小工具
将机器人改造为教育工具也未尝不可。可鼓励学生自主组装硬件,与机器人进行身体互动。
4、其他方面
论文中提到,如果增加更多的滚筒模块,就可将机器人改装为“形状显示器”,在改变形状时做到更为动态流畅,甚至成为高刷新率的3D打印机。
如果将触摸感应应用到机器人中,用户就可与显示的形状即时交互。
甚至可以应用同一组硬件完成用户的不同需求。当需要疏通管道时,就组装一个链式机器人,如果想要机器人快速移动,就将其组装为球型。
结语:柔性机器人集合以往产品优势,前景乐观
以往的机器人各有优点,但均无法独立胜任工程作业任务,而斯坦福团队发明的“无绳系等周柔性机器人”则为这一问题提出了解决方案。通过对目前的软式、集体式、桁架式机器人分别扬长避短,新型机器人无疑可以承担起工程任务。
除工程应用以外,新型机器人也在航空、教育、3D打印等方面显示出了应用可能,应用前景十分值得期待。
文章来源:TechRepublic,Science Robotics
