







车东西(chedongxi)
文 | 小路
车东西6月29日消息,近日,俄罗斯一家名为Ralient的自动驾驶初创公司成功推出基于神经网络的自动驾驶系统,该系统名为MIMIR。
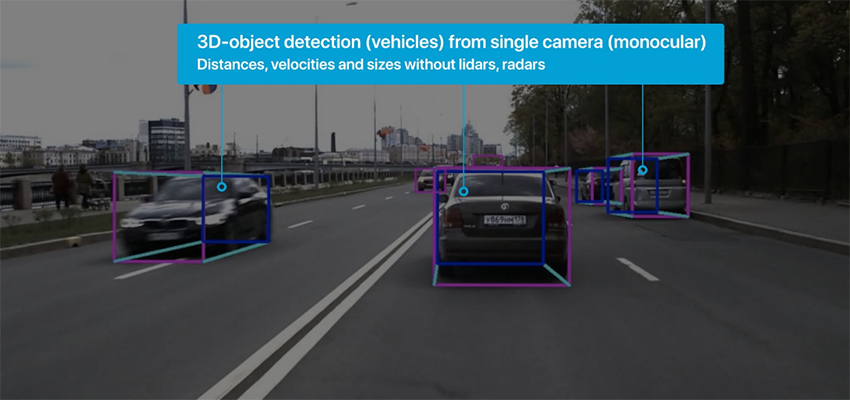
MIMIR自动驾驶系统仅用一个普通摄像头即可构建自动驾驶汽车所需的3D场景,实现3D感知。Ralient公司在You Tube上发布了一段由单个摄像头拍摄的视频,视频展示了该公司的MIMIR自动驾驶系统是怎样检测出路上车辆的尺寸、运动状态和方向。

▲MIMIR自动驾驶系统计算机视角
更神奇的是,MIMIR自动驾驶系统不仅可以测算出本车与其他车辆之间的距离,并且能够在不知道上一帧的情况下分别处理每一帧画面,进而通过跟踪其他车辆,准确测算出其他车辆的速度。
据悉,目前的汽车自动驾驶3D感知的方法存在成本高、探测距离近、不能测算车辆距离和速度等方面的缺点。Ralient研发的基于神经网络自动驾驶系统或将解决自动驾驶3D感知所遇到的难题。
一、Ralient推出新的自动驾驶系统 已经展开车辆上路测试
近日,俄罗斯一家名为Ralient的自动驾驶初创公司推出基于神经网络开发的自动驾驶系统,该系统名为MIMIR,仅用一个普通摄像头即可构建自动驾驶汽车所需的3D环境,实现3D感知。
Ralient在You Tube上传了一段仅由单个摄像头拍摄的视频,视频中展示了该公司的MIMIR自动驾驶系统是怎样监测出路上车辆的尺寸、运动状态和方向的,该公司认为一个雷达或者摄像头就足以收集复杂的道路信息。
不仅如此,MIMIR自动驾驶系统还可测算出本车与其他车辆之间的距离,并且能够根据摄像头所拍画面,测算出其他车辆的速度。
Ralient已经展开了MIMIR自动驾驶系统的上路测试,测试其对被残缺道路标识的识别能力。

▲MIMIR自动驾驶系统识别残缺道路标识
另外,这家自动驾驶初创公司还在研发名为“R-Shuttle”的无人驾驶汽车,该公司不会将高精地图作为汽车自动驾驶的核心,因为他们认为高精地图易受恶劣天气影响,并不能满足实用化的要求。

▲MIMIR自动驾驶系统在恶劣环境下工作
二、主流技术路线成本高昂 最高可达40余万元
据了解,现在为自动驾驶提供3D感知的技术主要有,立体视觉、RGB-D和Lidar三种技术路线。
立体视觉的工作原理与拍摄3D电影类似,使用两个或两个以上不同位置的摄像机进行环境图像的收集工作,之后通过两个角度拍摄的图像差异计算目标物体的距离。此路线所需的硬件简单,只需要两个摄像头,但是测算目标物体的速度和位置精度方面存在问题。
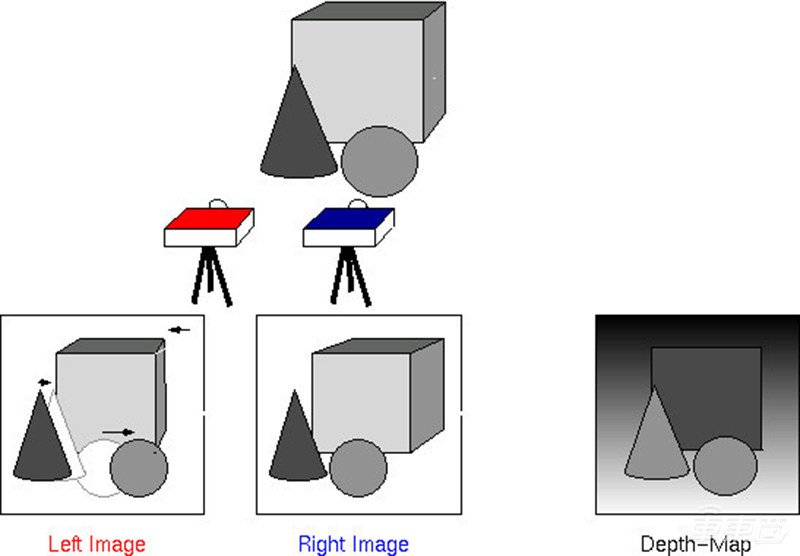
▲立体视觉工作原理示意
RGB-D可以看做是增加了可探测目标物体的距离功能的2D摄像头,工作原理是,利用光到内部传感器的投射时间计算与目标物体的距离。此项技术路线成本相对较低,但易被干扰和遮挡。
Lidar即激光雷达,并且大多数的3D Lidar传感器是多线的(最多64线),它利用发射的激光脉冲测算与目标的距离。此项技术路线探测距离远、精度高,但过于笨重,而且成本较为昂贵,每台64线的Lidar需要约6万美元(约合人民币42.5万元)的成本。
Ralient公司表示,基于神经网络的MIMIR自动驾驶系统成功开发,意味着可以使用普通智能手机的摄像头取代激光雷达等昂贵的探测设备。
结语:神经网络将助力自动驾驶发展
目前,自动驾驶非常依赖于对场景的3D感知,而三种主流的感知技术路线又存在这样或那样的问题。
Ralient利用神经网络开发的MIMIR自动驾驶系统解决了探测精度等方面的问题,还大幅降低了成本,拥有较为广阔的发展前景。
据悉,Ralient公司已经开始对MIMIR自动驾驶系统进行了上路测试,一旦验证该系统成熟,神经网络将向更高级别发展。
