







出品 | 智东西公开课
讲师 | 丁宏钰 优必选研究院技术专家
提醒 | 关注智东西公开课公众号,并回复关键词 优必选05,即可获取课件。
导读:
7月20日,优必选研究院技术专家丁宏钰在智东西公开课进行了一场的直播讲解,主题为《大型仿人机器人整机构型研究与应用》,这也是优必选专场第5讲。
在本次讲解中,丁宏钰老师首先从大型仿人机器人整机构型国内外研究现状入手,围绕机器人整机构型、关节运动特点、伺服驱动器、减速器、仿真平台等方面进行深度讲解,最后就大型仿人机器人整机构型未来发展趋势给出自己的见解。
本文为此次专场主讲环节的图文整理:
正文:
各位朋友大家好,我是来自优必选研究院技术专家丁宏钰,今天由我和大家一起来讨论大型仿人机器人整机构型的研究和应用。报告分为3个部分:
1、大型仿人机器人整机构型研究现状
2、优必选大型仿人机器人整机构型的研究及应用
3、大型仿人机器人整机构型的未来发展趋势
大型仿人机器人整机构型研究现状
① 大型仿人机器人机械概述
仿人机器人主要由三大部分组成:机械部分、控制部分及传感部分。机械部分是其他部分的基础,就像建大楼一样,它类似于地基或者每个砖块。
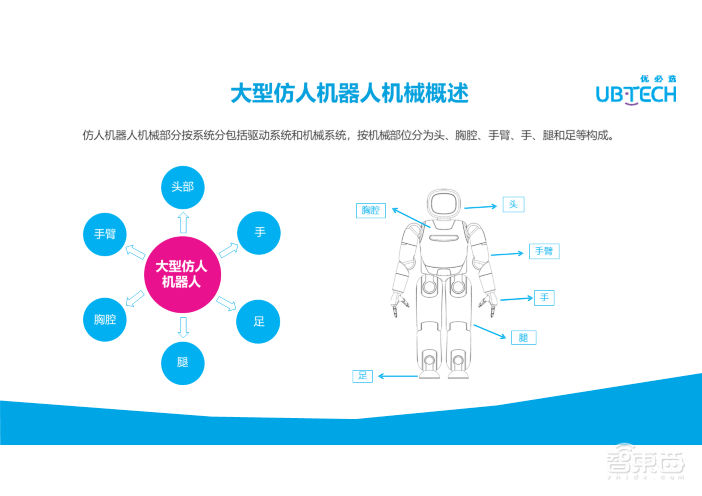
机械部分又可分为两个子系统,一个是驱动系统,另一个是机械系统。驱动可以理解为机器人的关节,怎么让机器人去运动。机械部分是连接关节和关节之间,包括怎么去搭载这些传感器。如果按部位来分,机器人可以分为头、胸腔、手臂、手、腿和足部等,上图展示的是Walker机器人的外观图。
机械部分关键之一是关节的数量和关节的位置分布。无论是关节的数量,还是布置方式,都与整个机器人构型密切相关。我们知道人体有206块骨头,大的关节有78个,主要的关节类型有6种。仿人机器人是模拟人类关节和骨骼的架构的机器人,通常它有15-70个关节,关节的类型通常有三种,这三种主要包括一个是前向,一个是侧摆,还有一个是旋转。现有的仿人机器人通常头部一般有1-3个自由度,就是1-3个关节,手臂一般是4-7个关节,人的手有21个关节,仿人机器人手通常是2-13个关节点居多,仿人机器人腿部一般是6-7个关节,使用6个关节的多一些。
② 国外研究现状
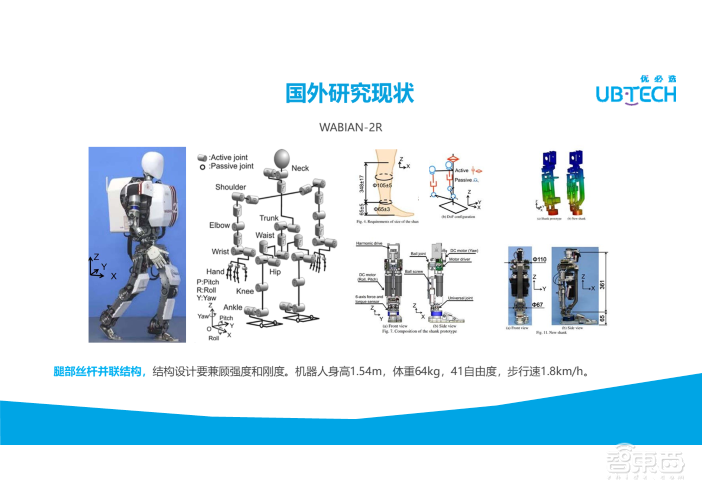
上图展示的是早稻田大学的WABIAN-2R机器人,这个机器人特点在于整个腿部除了正常的6个自由度之外,还有一个自由度是小腿的旋转自由度,这样机器人可以模拟人类走外八的步态,它也可以实现整个机器人的节能。另外,传统机器人的腰部可以分解为三个自由度,但它的腰部放了4个自由度,这样机器人在步态时可以实现直腿的行走。我们看到许多传统机器人,它的膝盖是弯曲的,是屈膝行走,还有它的小腿采用丝杆并联结构。
在整个机器人的设计过程中,除了关注于整个腿部结构的强度外还要关注刚度。WABIAN-2R机器人的最快的步行速度是1.8km/h。另外,它的足部也做了一些创新,它的脚分为前后脚掌,脚部不是一体的,之间增加了一个被动的关节,通过这样的设计可以实现节能64%。另外,脚分为前后脚掌之后,可以实现原地的转向。
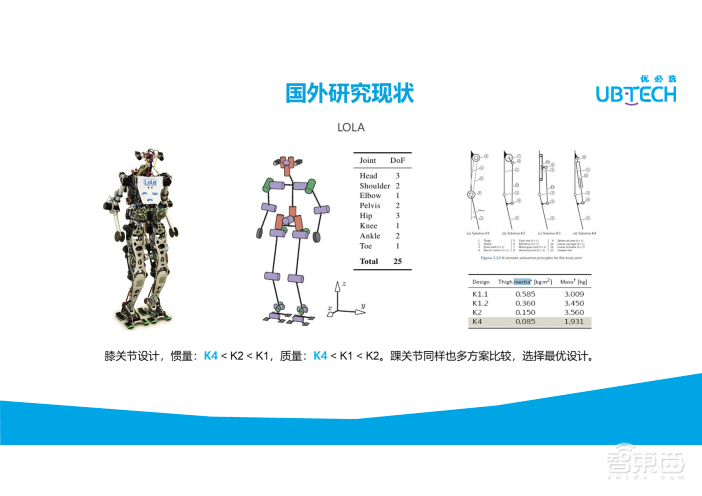
第2个是来自慕尼黑工业大学的LOLA机器人,LOLA机器人在大腿上做了4种设计,然后根据设计目标:整个惯量最小、质量最轻,最终选了k4方案,另外在小腿上它也做了多个方案,最终比较选一个最优的方案。

下面介绍LOLA机器人小腿踝关节部分的驱动方式,它把整个电机放在了大腿的上端,在上图序号5对应的位置,然后通过一个带传动传到膝盖的位置,接着往下传,通过一个行星滚柱丝杠的机构,它用这种传送方式代替传统的那种滚珠丝杠,这种方式比传统的方式重量会更轻。这样他把小腿脚踝的关节驱动器移到大腿上,膝盖也移到大腿。整个腿的重量比较轻,然后转动量也比较小。这个机器人最快的行驶速度是3.6km/h。
第3个机器人是来自韩国科技研究院的DRC-HUBO机器人。他们研究机器人最早从2005年开始,经过迭代,开始速度是1km/h,后来慢慢做到1.5km/h。2015年为了DARPA机器人挑战赛,对机器人做了改装,在原有的基础之上,增加另外一种轮式运动方式。这样机器人有两种运动方式,一种是步行、一种是轮式的方式,最终2015年他们获得了DARPA机器人挑战赛的冠军。我们可以看到轮式的速度就是行走速度的两倍。
DURUS机器人是佐治亚理工2016年推出的一款机器人,这款机器人有它自己的一个特点,以前很多机器人采用谐波减速器,这个机器人采用摆线针轮减速器传动方式,他把踝关节的两个关节的驱动系统位置上移到膝盖的位置,又增加了一个被动弹簧,这样可以实现柔顺的储能,或者缓冲一些冲击。同时它也是机械设计和控制工程师联合工作,通过多轮的迭代优化,然后实现了它本身的关节力矩从450Nm降到150Nm的需求。
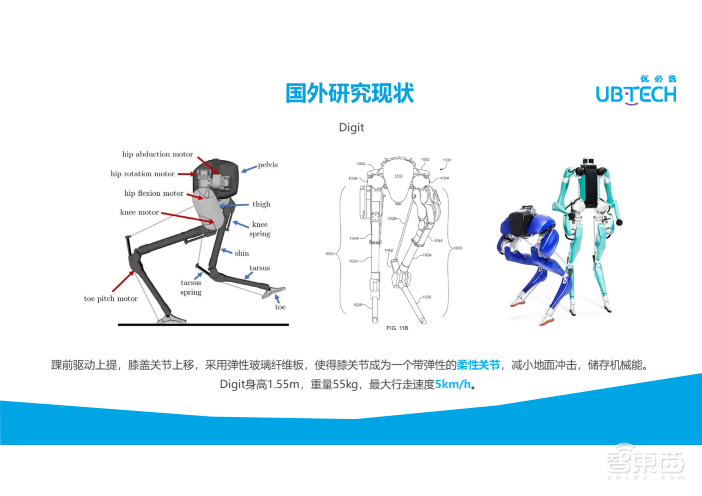
最后一个机器人是来自来自于俄勒冈州立大学的团队,后来创业做的机器人, Digit机器人在整机构型上很有特点。它参考的是仿生学,就是模拟鸟类整个腿部的结构。从上图可以看到这些双足鸟类,它们本身腿都很细,另外如果踩到不平整或凹陷的地方,他可以有很强的调整能力,这也是做仿生学借鉴的地方。我们看下他们做出的机器人在构型上的特点,首先把踝部的驱动器移到器膝关节下方的位置,同时把整个膝盖的驱动器移到大腿的位置,也增加了一个连杆结构,促成了一个SEA,另外髋前的关节,他做了一个PEA的结构,这样就实现了关节的一些柔顺,减少地面冲击,还有储能。他本身弹性结构是通过玻璃纤维板做的,这个机器人目前最快行驶速度是5km/h,也是一个比较快的机器人。
③ 国内研究现状
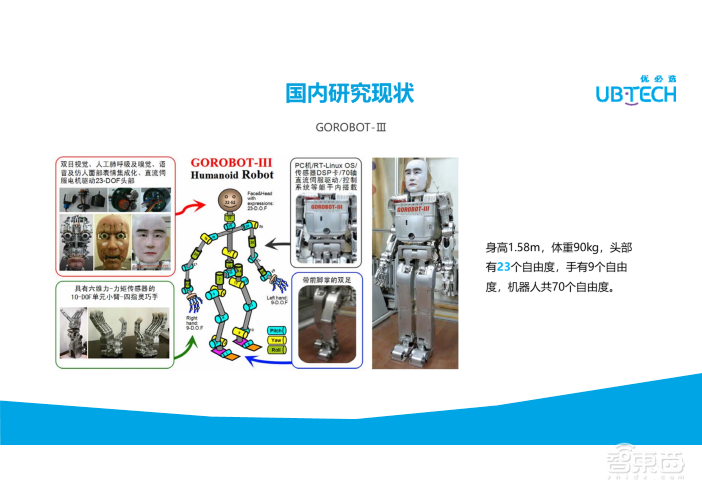
上图是哈工大的一个机器人,GOROBOT原始设计是一个类猿的机器人,当时他们承接了国家的863计划,然后做的机器人,它比较突出的特点是头部的自由度比较多,做了23个自由度,其他方面自由度的布置与传统的区别不大。
汇童机器人是北京理工大学做的,他们也承接了国家863计划,2005年这代可以看到的数据是身高1.65m,重量65千克,自由度是 32个,行走速度是1.2km/h。2018年北京举办的世界机器人大会,他们展示的是汇童6P机器人,它可以实现跌倒爬起、翻滚、行走和爬行的能力。
④ 整机构型的重要性
上面讨论了国外、国内的一些整个机械构型的研究,其实我们总结来看,主要是3点,第一点是整个机器人构型对机器人的性能是有很重要的影响,首先是DRC-HUBO机器人,它有两种运动方式,一个是步行的方式,一种是轮式的方式,轮式方式是步行方式是速度的两倍,这样他能在比赛中争夺更多时间,最终赢得冠军。另外还有LOLA机器人在小腿和大腿上的构型做了很多方案,最终选择一个最优方案,最终目的是通过构型的组合方式改变整个机器人的运行性能。
第二点是减少仿人机器人整个腿部重量和惯量对提升运动性能有帮助,如果我们膝盖以下的转动量越小,这样在快速行走时需要的力就越小,因为快速行走本身有个加速度,惯量越小,需要力矩越小。我们看到 Digit机器人把整个踝关节的驱动器,还有整个膝盖的驱动器都上移,最终实现速度上的大幅提升。
最后一点是增加腿部弹性机构可以减少仿人机器人行走冲击力和储能,很多机器人都有体现,包括DURUS机器人和Digit机器人。如果只是电驱动,它的功率密度是有极限的,从目前的研究来看,电功率的密度和人体肌肉的功率密度比还是有差距的。所以,我们还要增加弹性机构来提高整个电驱动方式的输出能力,同时也能减少地面的冲击。
优必选大型仿人机器人整机构型研究及应用
①整机构型和伺服驱动器的关系
总的来看,整个伺服驱动器和整机构型之间有两种关系,一种是整个伺服驱动器作为一个独立的模块,它可以单独的测试和组装,然后再和整机的结构连接在一起。另外一种方式是伺服驱动器的结构和整机结构融合在一起,伺服驱动器本身不能单独去测试,它只有与整机结合在一起才能进行测试。像伺服驱动器独立这种方式,采用此方案机器人比较多,如德国宇航局的TORO,我们现在做的Walker目前是这个方案。第二种方案,像上面提到的国外的一些研究:LOLA机器人和Digit机器人,基本都是这种方案。
②仿人机器人关节运动的特点
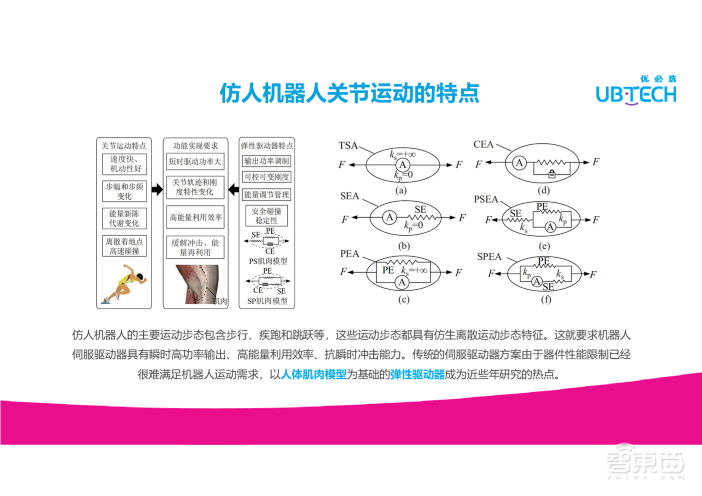
这是很关键的一点,我们做仿人机器人核心的想法是机器人在一些特定场合,代替人或帮助人做一些事情,我们要了解人的关节和肌肉是怎么工作的。首先,看下关节运动的特点,一个是它本身的运动速度比较快、机动性好,因为人关节的步幅和步频都是变化的,还有一个是人脚着地点也是离散的且高速碰撞,怎么样才能满足这种关节运动特点,即整个关节设计时要实现短时的大功率和高能量利用效率及缓解冲击的能力。
为此提出一个弹性驱动机器的概念,它的基础是来自Hill肌肉三元素力模型,主要由三部分组成,由上图可以看出CE是肌肉收缩单元,SE是串联单元,PE是并联单元。它有两种组合形式,一个是 PS肌肉模型,一个是SP肌肉模型,这两种模型最终转换为右边的5种形式,第一种是传统的刚性驱动器,可以理解为是电机+减速器+编码器,这样构成一个刚性的驱动器。第二种是传统的驱动器+弹性单元,然后再连接负载,就是SEA串联驱动器,图c就是在传统的驱动器外并联一个弹性单元,就是PEA。d图显示了在SEA的基础上增加了一个离合,弹性单元可以起作用,也可以不起作用,它可以被控制。最后e图和f图是以上三种的一个组合形式。以人体肌肉模型为基础的弹性驱动器成为近些年研究的热点,有很多高校和研究所都对这方面做了大量的研究。
③ 仿人机器人伺服驱动器的类型
下面总结下仿人机器人主要的伺服驱动器类型,主要有三种,一种是传统的伺服驱动器,另外一种是弹性伺服驱动器,最后一种是本体伺服驱动器。弹性伺服驱动器最早是由麻省理工于1995年提出,本体伺服驱动器也是麻省理工于2016年提出。
首先看下三种伺服驱动器的特征,传统伺服驱动器是无刷电机+高传动比减速器+(高刚性力矩传感器)+输出端,高刚性力矩传感器是可选择项;弹性伺服驱动器是在高传动比减速器和输出端之间增加弹性体;本体伺服驱动器是高力矩密度电机+低传动比减速器+ 输出端。本体的意思就是本体感知外面的一些力,更直接的讲是通过电流来反馈你外面的力。最理想的是直驱,但是现有的电机由于它的整个性能不能满足机器人关节需求,所以还要加减速器,所以本体驱动器是一个折中的方案。
传统伺服驱动器技术比较成熟,也在很多领域得到广泛的应用,弹性伺服驱动器在研究阶段,很多还集中在高校和研究所,本体伺服驱动器主要应用场合还是在4足机器人或小型的双足机器人。
对于优必选伺服驱动器的类型,我们仿人机器人做了几代,伺服驱动器也迭代了几代,同时也做了很多的优化、测试,我们的整个伺服驱动器包括高密度无框力矩电机、双位置编码器、谐波减速器,在整个控制软件和安全监测也做了大量的工作
④ Walker机器人的整机构型
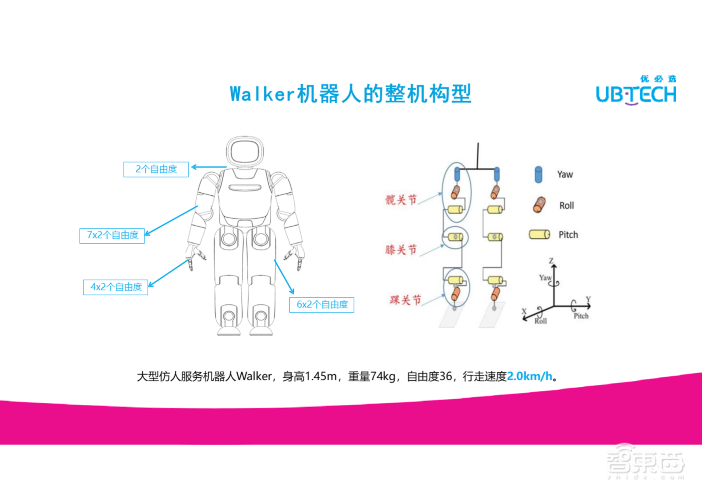
由左边的图可以看出,Walker头部是有2个自由度,一个是前向,一个是旋转,然后手臂有7个自由度,大臂上有3个自由度,小臂上有4个自由度,手有4个自由度,其中小指和无门指是共用一个自由度,每条腿有6个自由度,类似于右图的结构。目前整个机器人是1.45米,重量是74公斤,自由度一共有36个,最大行走速度为2km/h。
让机器人走进千家万户,是我们公司的一个目标,Walker机器人也承载了我们的很多希望,也投入大量的人力物力去做这件事情,目前也取得不错的效果。下面可以看下在2020年CES上的视频,第二段是在展会现场,机器人快速行走的视频,整个手和腿的动作是相互协调,机器人识别自己的路径、环境,目前最大行走速度是2km/h。

下面介绍下现在正在做的工作,我们做过很多的调研,还有基于原有进行的一些测试,现有的这些传统构型的方式,机器人本身的速度有一个瓶颈,现在做到2km/h,如果做得更快,可能腿部的惯量对机器人的行进速度会有很大的影响。所以,我们做了很多前期的讨论和预研工作,包括现在想把整个踝部、膝盖的驱动器位置都上移,减少整个腿部的惯量。
整个的流程是我们先初步定义每个关节输出需求、转角需求和尺寸规格,然后以此去选择电机、减速器及编码,整个驱动器方案做好之后,再设计整个机器人的构型,整个驱动器设计好之后,再把三维模型放到仿真平台去做仿真,经过几轮迭代,得到一个比较优化的设计。设计和仿真完成之后,再去做实际的真机。
⑤ 减速器标准化制定
仿人机器人常用的减速器主要有三大类,第一个是精密行星减速器,第二个是谐波减速器,第三个是摆线减速器。从回差角度看,精密行星减速器是3-25弧分,谐波减速器是0.5-2弧分,摆线减速器是1-1.5弧分。目前来看,精密行星减速器大部分用在四足机器人,还有一些大型仿人机器人的手臂和头部。另外,精密行星减速器用在服务机器人的场景和用在传统工业级的场景需求上还有很多不一样。谐波减速器在仿人机器人应用是比较广泛的,同时它还可以用于一些工业机器人、协作机器人上。摆线减速器目前在仿人机器人这方面只有DURUS机器人在用,在传统的工业级机械臂上用的比较广泛。由于整个机器人对整个控制上要求比较高,所以回差是减速器发展的一个非常关键的指标。
目前的精密减速器的标准有GB/T 30819-2014,这是一个机器人用谐波减速器的标准,还有一个标准是 GB/T 35089-2018,是机器人用精密齿轮传动装置实验方法的标准,但是这两个标准都没有对整个精密减速器的回差测试和评价做很详细的说明,只是比较简单说明一下,没有详细说明测试方法和评价方法。但回差又是整个减速器一个非常重要的性能参数,所以2019年由北京工业大学石照耀教授牵头开展《精密减速器回差测试与评价》的制定工作,我们也在参与其中。另外,回差又分为静态和动态,测试方法也不同,所以非常有必要建立一个国家级的标准。
⑥ 仿真平台
最后看下仿真平台的工作,无论对于任何设计仿真都非常重要,仿真平台可以帮助我们做一些硬件的设计和选型,同时还可以做一些算法的设计验证,还可以对一些场景做模拟和仿真。仿真平台可以缩短整个的研发周期,同时可以降低成本,减少设计的风险。
下面介绍下仿真平台大的思路,整个机械设计和运动算法工程师一起让整个机器人系统做个优化。主要包括3部分,一个是设计变量,一个是限制条件,还有一个目标函数。设计变量包括关节长度、关键结构尺寸、伺服驱动器的选型等,伺服驱动器的选型包括电机,还有整个减速器,它可以有不同的组合;限制条件就是有结构刚度、关节力矩、步态轨迹等,最终的优化目标是整个机器人的总质量最轻,运动性能最好。
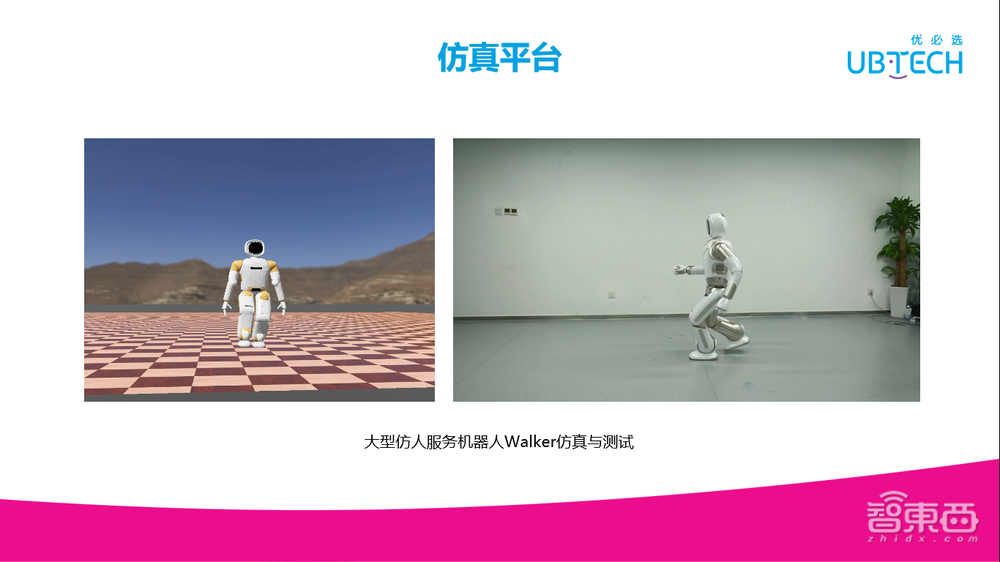
上图左部分是在仿真环境Walker走路的视频,在仿真环境里,我们的运动算法和机器人上的算法是一样的。右边是在真机上面的测试,可以看出两个的区别是手臂仿真是没有动的,但腿部的整个步态是一样的。同时,我们也会对整个仿真和真机上的一些关节力矩的曲线去比较,仿真会更好的指导做一些设计和测试。
大型仿人机器人整机构型的未来发展趋势
最后我们来讨论下大型仿人机器人整机构型的未来发展趋势,这是一个比较开放性的话题,总共有三点,第一点是伺服驱动器和整机构型的融合设计,机电和运动控制方面的联合仿真,实现机器人的最优设计。
第二点是引入弹性元件,为电驱动伺服驱动器提供辅助力矩和缓冲地面冲击,目前已经有很多研究机构在做,但还没有一个成熟的商业的机器人应用这种技术,但这确实也是一个发展方向。
最后的一个是仿生学,尤其是仿人机器人,很多设计都是模拟人或动物背后的一些原理,原理上有新的一个构型设计出来。之前有一些机构做青蛙的整个腿部的构型,包括之前说的弹性驱动器,它也是来自人体肌肉的模型。但是这些人体肌肉的研究也会推动整个机器人的机械技术的发展。
