








智东西(公众号:zhidxcom)
编辑 | 孙悦
智东西6月7日消息,近日GTIC 2021嵌入式AI创新峰会在北京圆满收官!在这场全天座无虚席、全网直播观看人数逾150万次的高规格产业峰会上,来自产业链上下游的16位大佬共聚一堂,围绕嵌入式AI的软硬件生态创新、家居AIoT、移动机器人和工业制造产业4大版块地图,带来了深入浅出的分享。
会上,360人工智能研究院运动引擎算法负责人潘俊威带来了题为《嵌入式AI快速发展,扫地机器人进入感知决策新赛道》的演讲。

▲360人工智能研究院运动引擎算法负责人潘俊威
潘俊威提到,我国扫地机器人市场规模已从2013年的8.4亿元,增长到2020年的93.8亿元,正不断快速增长。同时,扫地机器人产品中高端化明显,智能已成为高附加值特征。
不过,扫地机器人在易用性上还有较大提升空间。“尤其是用户对避障的需求越来越强烈,将3D深度相机应用在扫地机器人上也变得水到渠成。”潘俊威说,将3D深度相机和多传感器融合,能让机器人获取环境信息的能力从二维提升到三维,大大增强设备的环境感知能力。
为了进一步满足消费者需求,360提出了扫地机器人的无人驾驶大脑概念,重点是提升移动机器人在环境感知、场景理解、决策规划三个方面的能力。
例如,基于360无人驾驶大脑研发的三雷达融合避障技术,采用多传感器融合感知算法,结合聚类和分割算法,能让扫地机器人识别门槛、推拉轨道、厚地毯和普通障碍物,做到避障的同时顺畅通行门槛轨道等区域。
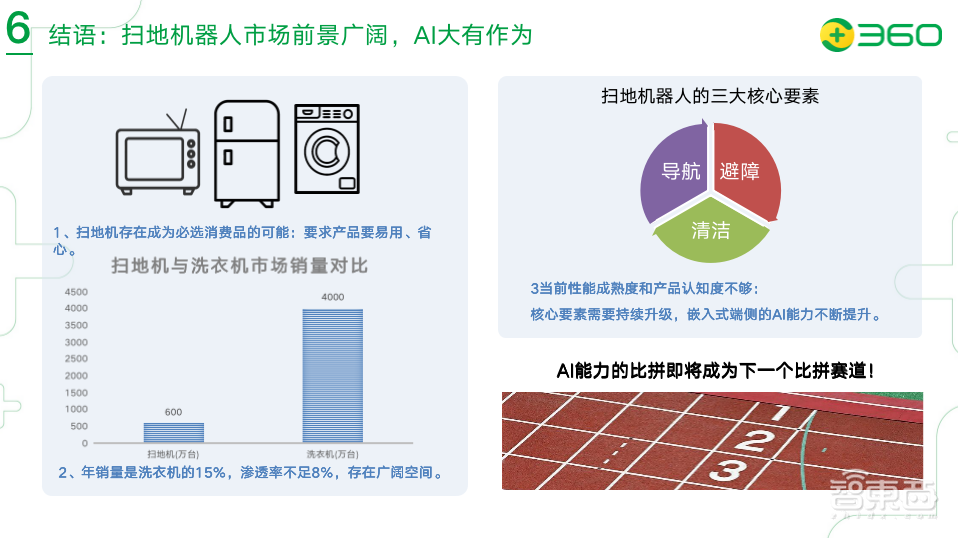
目前扫地机器人年销量为600万台,是洗衣机销量的15%,市场渗透率不足8%,仍存在广阔空间。潘俊威认为,想要推动这一市场的发展,要持续升级扫地机器人的导航、避障和清洁三大核心要素。
以下为潘俊威演讲实录整理:
一、扫地机器人25年,从乱跑乱撞到自主导航
先为大家介绍一下扫地机器人的前世今生。
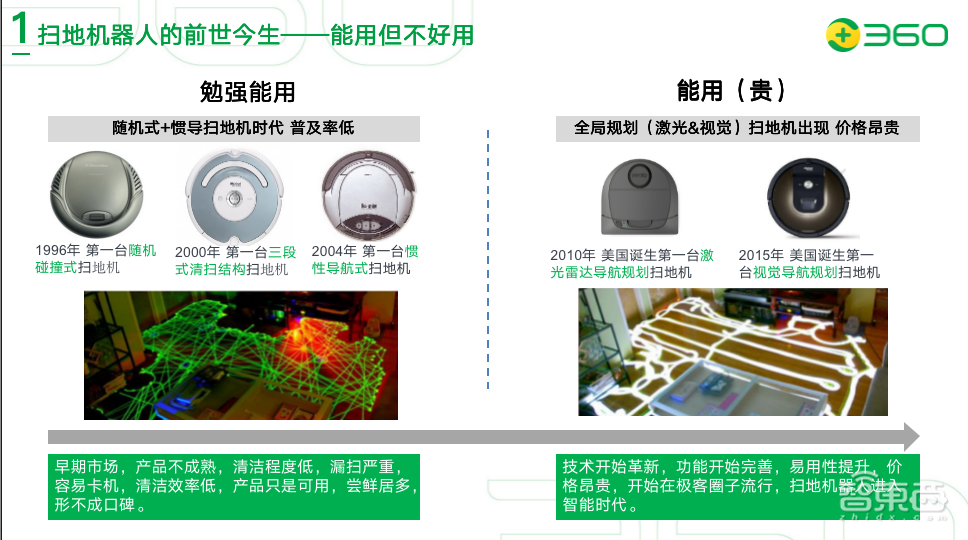
1996年第一台扫地机器人诞生,它奠定了扫地机器人导航与规划的基础。不过,其实没有什么导航,只是随机碰撞的方式工作。
2000年第一台拥有三段式清扫机构的扫地机器人诞生,它奠定了扫地机器人接下来清扫机构的样式。
2001年第一台激光雷达导航的扫地机出现。
2004年第一台以惯性导航的扫地机器人诞生,它标志着扫地机初步具有导航的能力。这时候扫地机器人处于市场早期,以随机式和惯导式的机器人为主,经常出现漏扫严重、清洁率低,容易死机卡机,清扫率非常低等问题。这个阶段机器就是可用,消费者以尝鲜居多,形不成口碑。
2005年第一台视觉导航的扫地机器人诞生,机器机已经初步具有全局规划的能力。这个阶段的扫地机器人可以进行很规整的清扫。技术开始革新、功能完善,易用性得到很大提升,但是存在一个缺点就是价格昂贵。这个阶段只是在极客圈里流行,它标志着扫地机进入智能时代。
二、2016年为节点,扫地机器人从好用到“真香”
扫地机的早期阶段,随着激光雷达、传感器、Camera、CPU嵌入式端芯片的降低以及算力的提升,扫地机器人开始逐步向好用和真香的阶段发展。
2016年小米发布LDS扫地机器人与科沃斯VSLAM方案扫地机器人、360LDS扫托一体机器人,扫地机器人在路径规划上进行比拼。由于传感器成本的极大降低,机器人的智能程度得到很大的提升。特别是在用户体验方面,直接上升了一个层次。产品不仅变得好用,性价比也变高了。
扫地机器人进入发展的快车道,软件禁区、多楼层地图、自动禁区、地毯区识别等功能都开始搭载到全局规划式的扫地机器人上面。方案都是往更干净、更省心的方向去发展。
比如云鲸发布自动洗托布机器人,可以自动帮你清洗抹布,不用自己动手。iRobot推出中央集尘的扫地机器人,一个月甚至更长时间不用清理垃圾和尘盒。360推出三目深度视觉扫地机器人,可以多传感器融合解决避障问题,让用户更省心。这时候的机器人已经开始向“真香”的阶段发展了。

三、市场不断增长,渠道线上为主,年轻消费群体居多
国内扫地机器人的市场2013年市场销售额为8.4亿元,到2020年已增长到93.8亿元,这一市场正在不断快速增长。
在用户群体方面,35岁以下的消费者占到97%以上。2020年,92.28%销售额都是由线上创造的。消费者主要以年轻人居多,在这一部分人群里面大家对于生活品质有着更高的追求,对于智能程度的接受度高,并愿意为此买单。
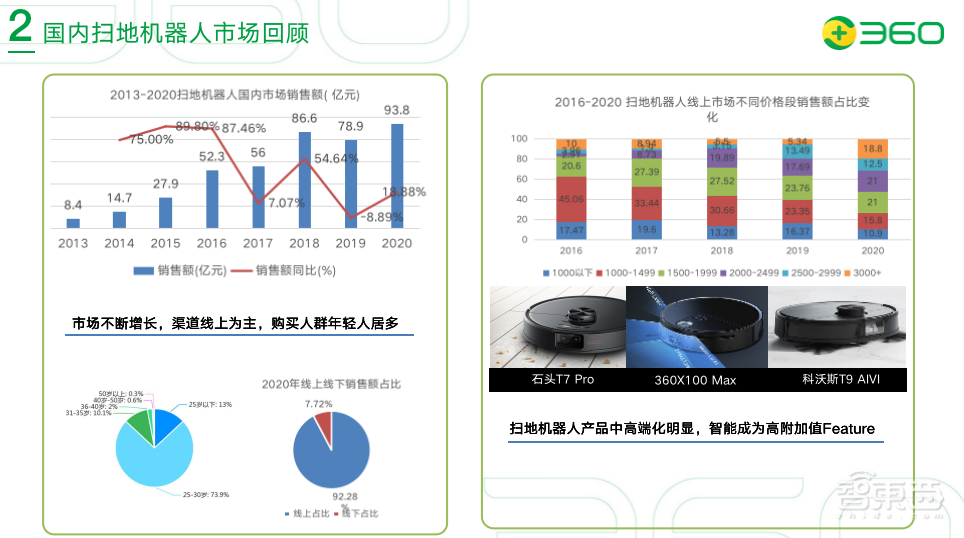
从销售的数据上看,从2010年到2020年,扫地机器人的价位段逐步上升,特别是从2020年开始,2000元以上价位段的扫地机器人占比超过50%。在这个阶段各家推出了旗舰级的产品,在智能方面下了很大工夫,比如石头的双目避障项目、360三目融合避障方案、科沃斯单目避障方案、扫地机器人中高端化的趋势明显,智能程度的高低也成为消费者评判的一大标准,这也是支撑扫地机器人高价位段的重要因素。
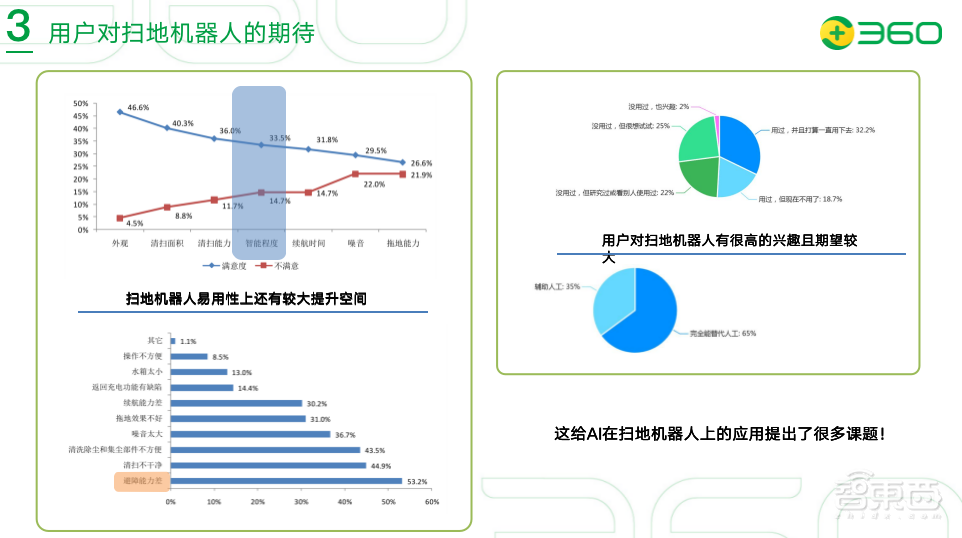
通过针对扫地机器人问题发放的调查问卷可以发现,在用户对扫地机器人的期待中,机器人的智能程度占到第四位。除此之外,调研的前七个问题都和清扫结果相关。
大家普遍对扫地机的智能程度不满意,在避障问题上吐槽率高达53.2%。绝大部分人对扫地机器人还是有很大兴趣,那些没用过、没兴趣的人群只占到2%。出现的普遍现象是,大家对扫地机器人的期望值偏高,65%的人期望它能够完全代替人工。
四、AI成为扫地机器人的创新点
扫地机器人有三大核心要素,导航、避障、清洁,其中导航、避障占到很大的比重,这给AI在扫地机器人上的应用提出很多课题。
随着技术的不断成熟和应用场景的不断丰富,深度相机在手机、汽车、VR/AR、新零售、安防等多个市场的需求不断增长,从2019年以来该行业进入快速增长期,可以用在无人驾驶、AR应用、三维重建等等多个领域。

在扫地机器人领域上,由于用户53.2%对于避障的需求非常强烈。将深度相机应用在这上面可以很好地解决避障问题,像360在2019年上海CES上已经发布了搭载深度相机方案的扫地机器人,针对障碍物可以很好的躲避,并且不会碰它。
有了深度相机还不够,需要将深度相机和多传感器融合。之前扫地机器人的环境信息都是二维的,加入深度相机之后结合多传感器融合技术,将二维信息提升到三维空间,这样大大增强了机器人的环境感知能力。

之前的扫地机器人经常会遇到一些轮子悬空、门槛卡住、顶部被卡还有被线缠绕,还有门槛等问题,通过障碍物和三维信息可以很好解决这个问题。其核心还是关于扫地机器人的生存率、易用性、智能度。
机器人工作的家庭环境非常复杂,一百户家庭里面有一百种场景,机器人在各种各样的场景下都不会被卡死,出的去回的来,这对用户来说很重要。
降低扫地机器人的学习使用成本,可以看出35岁以下的消费者占了93%,像父母辈的人也想用这个东西,但是觉得使用成本很高,比如在使用上因为需要通过APP、网络等连接,这对父母辈的使用群体就不是很友好,这也成了他们使用扫地机的一大障碍。
有了摄像机的加持,可以降低扫地机器人的学习使用成本,它出的去回的来,在不适用APP情况下也可以轻松使用机器人。机器人将语义融入到地图中,特别是电线、门槛这种环境信息的识别,可以让扫地机器人更智能。
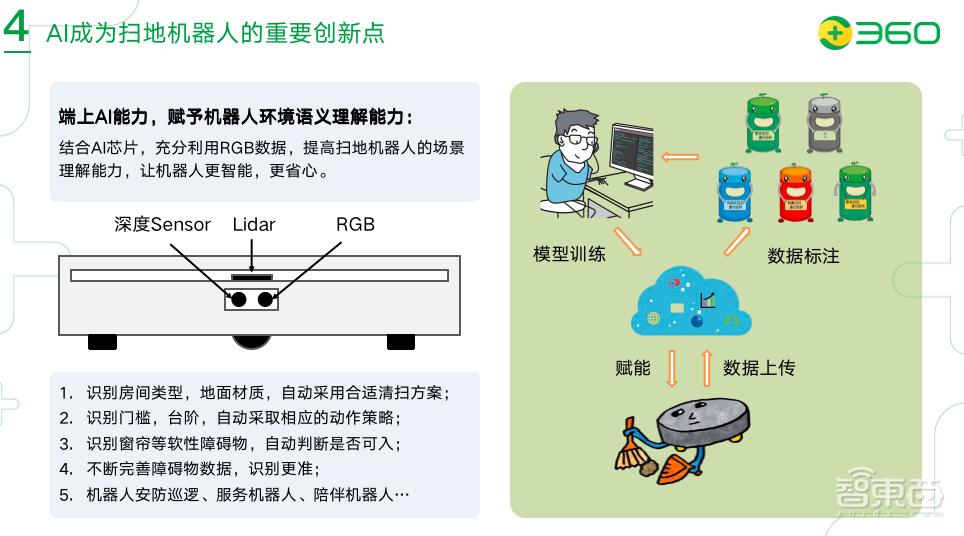
机器学习在扫地机器人上的应用,现在芯片的算力快速发展,包括端上AI的能力可以赋予机器人环境语义的理解能力,结合AR芯片,充分利用深度和图象数据,可以提高机器人对清扫场景的理解能力,做到更省心、更智能地工作。
云上AI能力,扫地机器人通过云端的训练服务平台自动更新到机器人身上,实现自我进化。端上AI能力可以赋予机器人场景理解的能力,比如机器人可以分辨房间、卧室、客厅、餐厅区、沙发区等,还能识别各个区域使用的是地砖还是地毯。对障碍物的识别,对场景能够理解之后就可以做更多更智能化的清扫。
另外一点,深度相机可以孵化有效数据,运用神经网络和机器学习通过单目RGP也可以识别出障碍物,它对算力要求很高。有了深度相机可以孵化有效数据,这样可以得到更加有效的数据信息。然后,通过不断完善障碍物的数据,让机器人的识别变得更准确。
在数据积累到一定程度的时候,可以去掉深度相机。机器在降本的同时,避障性能不会发生特别大的变化。当机器人有了环境感知与理解能力之后,就不仅仅是扫地机器人了,它可以充当一个安防巡逻机器人、服务机器人或者陪伴机器人等,这些功能都是可以去探索开发的。
五、无人驾驶大脑:环境感知、场景理解、决策规划
360针对这些场景提出了360无人驾驶大脑的概念,目前主要是室内的通用性移动平台,在扫地机上应用为了让扫地机器人更智能,重点要提升移动机器人在环境感知、场景理解、决策规划三方面的能力。
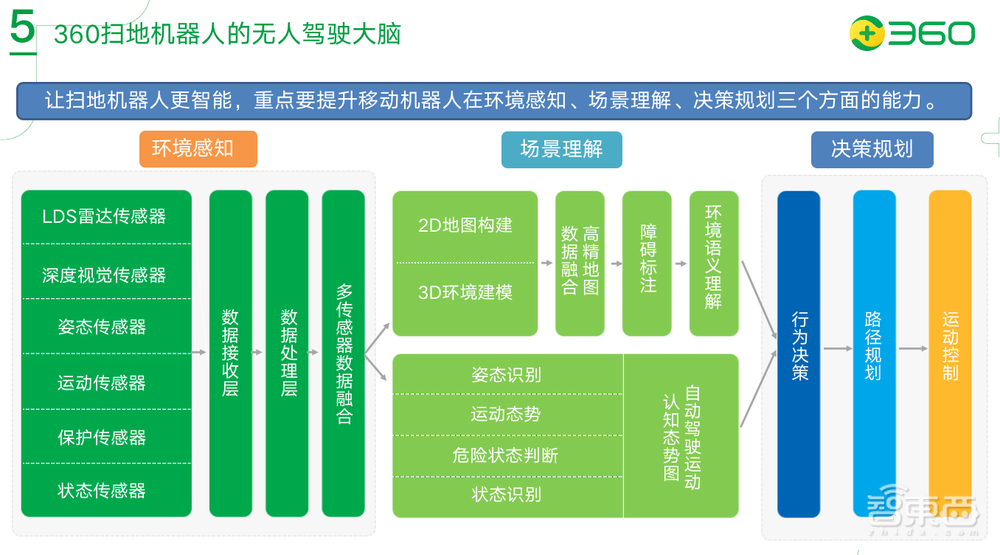
针对环境感知,我们要融合LDS雷达传感器等各种传感器,对这些数据进行处理,并且加以融合。在场景理解上,基于融合的数据构建二维地图还有三维地图,融合出来高精度的地图,这样可以更好地在地图上标注障碍物理解。对机器人的姿态识别、运动状态识别以及危险状态识别等进行判断认知,这也就是运动态势认知。上层的决策和规划对扫地机器人的行为进行决策,规划出合理的路线以及对机器人本体进行运动控制。
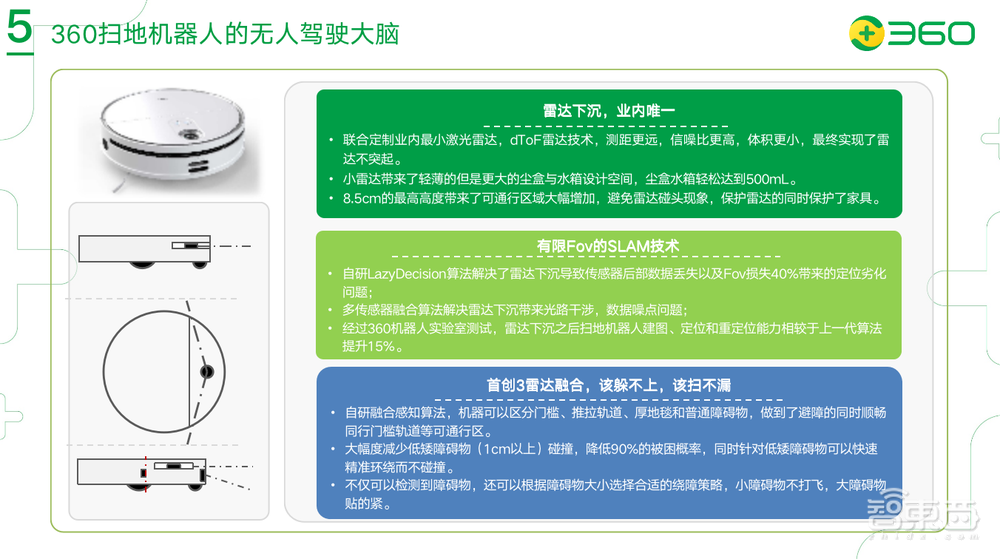
我们将这项功能应用在最新发布的旗舰款360差异板MAX机器上面,它是市面上唯一一款将定位雷达做到内置,放到机器人内部。激光雷达一般的都被安装在机器设备的顶部。我们把这个设计放到了机器人内部,在360差异板MAX机器里,我们放置了三个雷达,ETOP雷达,做定位,解决导航定位的问题;固态线性雷达,融合了ETOP定位雷达,解决避障的问题。
导航定位的问题,由于我们把原本应放于外面的雷达做了内置设计,导致机器人后部的雷达数据全部被遮挡了,因此需要解决数据被遮挡之后的定位问题。通过有限FOV导航定位技术,在这样一个限制的条件下可以精准定位不叠图。
引入地图的探索,通过多个匹配消除局部歧义,基于运动约束解决相似度高,解决的定位致信度偏差还有叠图概率高的问题。很多传感器涉及到多传感器的实时高精度融合算法框架,我们定位误差平均降低60%以上,轨迹平滑度提高20%-30%左右。
嵌入式端的芯片算力非常受限,我们面向受限的嵌入式平台,针对配准的底层算法进行优化,给出并传播致信度,消除歧义,提高鲁棒性,降低计算耗时50%以上,保证可实施性,算法可以跑在更低端的性能和更差的嵌入式平台上,从而达到降本的目的。
三个雷达融合的避障技术,基于三个线性雷达来恢复环境的三维信息。多传感器做到该躲的区域不会去,该扫的地方不会漏。多传感器融合感知算法,机器人可以识别、区分门槛,还有推拉轨道滑轨以及厚地毯和障碍物的区别。
如果遇到一些障碍物,比如堆满屋的孩子玩具一类的物品。我们使机器人能够区分障碍物,做到避障的同时不漏扫。我们构造了local map障碍物的概率图,它可以大幅减少低矮障碍物的碰撞,这能够降低90%以上的被困概率;而且我们机器人的侧向有一个固态雷达,可以通过运动约束,恢复三维空间结构信息,对障碍物进行建模,实现低矮障碍物的快速精准环绕,且不碰撞。

扫地机器人存在一个障碍问题,前方的障碍物检测到之后怎么处理?如果说要绕着障碍物行走的话,前面能看到的部分可以绕着它走,但是后面传感器所探测不到的地方,则需要靠侧向的传感器对它进行实时建模,以及规划出相应的行进路线。前向避障传感器数据融合定位信息,恢复我的障碍物三维结构,这样可以检测到障碍物,并且判断障碍物的尺寸,针对不同的障碍物选择合适的绕障策略。
小孩子的玩具,特别小的东西,比如遥控器、充电头等,如果离障碍物太近,绕着它走的时候,扫地机器人有一个边刷,很容易把这些障碍物打飞,对于桌子腿椅子腿这种东西离它太远了,又无法将边角清扫干净,需要识别这种场景,针对这种场景来选择相应的绕障策略。
小障碍物离它远一点绕着走。对于能识别出是桌子腿、椅子腿这类的障碍物,可以紧贴清扫,这样不会造成漏扫,提升清洁度。我们的机器人融合三个传感器的信息对障碍物进行精准建模避障,能够高效轻松通过这些区域。家庭常见的障碍物,比如口红,它可以轻松绕着走,而且边刷不会打到,绕过的时候边刷不会启动,这就要求传感器能够识别并判断出这一场景,选择相应的策略。
扫地机器人这个品类存在成为必选消费品的可能,但是必选消费品要求这个产品品类一定要易用省心,而且现在机器人的年销量是六百万台,这只是洗衣机15%的销售量,同时它的市场渗透率也是不足8%,所以这个市场还存在很广阔的空间。
扫地机器人的三大核心要素,导航、避障、清洁,有两个都是和软件相关,导航和避障决定了机器人的智能程度,它们在技术设计上占比非常高。这些核心要素都需要持续升级,在嵌入式端AI能力不断提升的背景下,AI能力的比拼即将成为扫地机器人下一个重要的赛道。
以上是潘俊威演讲内容的完整整理。
