








智东西(公众号:zhidxcom)
编译 | 杨畅
编辑 | 李水青
智东西6月21日消息,据美国《每日科学(Science Daily)》报道,近日,德国马克斯·普朗克研究所和美国科罗拉多大学博尔德分校的研究人员,利用蜘蛛关节液压驱动原理,设计出一种新的机器人关节驱动装置——软关节电动液压驱动器(SES)。
机器人关节驱动装置是机器人的动力来源,有液压式、电磁式等多种类型,电磁式最为普遍,之前的液压式驱动存在耗能、维护成本高等问题。最新的SES驱动器可以在关节处直接集成,无需任何笨重的组件和连接器,就可以轻松抓取小巧物体,能和高性能电磁驱动器表现相媲美,并且耗能很低。
该研究论文题目为《受蜘蛛启发的,可用于快速驱动柔软关节的电动液压驱动器(Spider-Inspired Electrohydraulic Actuators for Fast,Soft-Actuated Joints)》,于5月29日发表在《Advanced Science》上。
论文链接:
https://onlinelibrary.wiley.com/doi/10.1002/advs.202100916
一、现有关节驱动策略需加额外组件
在软体机器人领域,科研人员通过在机器人结构中融入弹性和柔性设计,努力重现自然生物多功能性,特别是学习生物可以和不确定、动态的外部力量或环境进行有效互动的能力。
不像大多数动物使用拮抗肌来产生运动,蜘蛛采取液压方式进行腿部运动,具有独特优势,这对机器人关节研发是一个重要的参考案例。
蜘蛛腿关节的基本结构通过液压创建扩展。坚硬的外骨骼有符合要求的关节分割,关节的外侧有柔软的波纹管膜。外骨骼中的空腔中含有蜘蛛的血淋巴,既是蜘蛛的“血液”,也是液压油。液体由蜘蛛前体的肌肉加压,关节柔软的波纹管膜在加压时膨胀,导致腿部伸展。蜘蛛恢复腿部弯曲则依赖于弹性组件或外骨骼内的肌肉。
想复制出像动物关节一样功能的机器人关节,需要使用一个轻量级的驱动装置,它可以支持高速和高功率输出、大幅度位移,并兼容无限制操作。虽然有无数种驱动策略存在,但还没有一种技术能满足所有这些要求。液压放大自愈式静电(HASEL)驱动器和袋状电机(pouch motor)解决了其中的一些问题。
HASEL使用导电液体驱动机制,由包裹着的电极和内装自愈绝缘液体的弹性软袋组成,在对其施加电压时,正负电极会相互吸引,从而挤压液体、改变软袋的形状,模拟人体肌肉的收缩。由于其可控制的线性收缩、可延伸的制造方案和可选择材料的通用性,Peano-HASEL驱动器在仿生机器人系统中尤其具有吸引力。然而,由于需要将线性运动转换为带角度的输出,因此很难将Peano-HASEL执行器集成到分布式关节连接系统中,这一要求增加了设计的复杂性,并限制了关节结构的可偏移程度,需要引入额外的组件。
▲HASEL驱动器
另外一些驱动技术,强调了机械有向性结构在机器人关节结构中的优点,包括集成刚性结构组件与软驱动,用于毫米到厘米尺度的机器人关节设计。特别是,Niiyama等人推出的袋状电机,由一个或多个由热熔粘接方法制造的气密膀胱(称为袋)组成,通过其分布式设计和机器人关节控制设计,提供了一种很有前途的连接方法,但仍然存在常见的气动学缺陷,需要通过复杂的有损耗空气网络分配压缩空气供应;因此,带宽和多自由度可控性仍然受到限制。
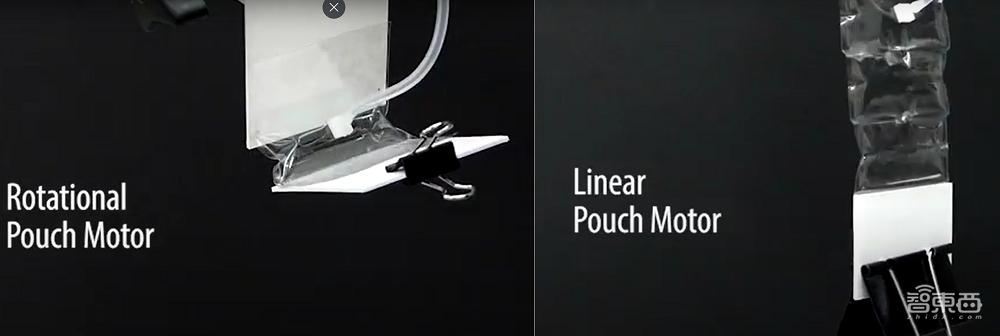
▲袋式电机
二、SES关节驱动器结构简单、取材方便
为了满足高性能驱动器的需求,实现关节快速连接,并可以无缝集成到机器人结构中,研究人员研发出了一种蜘蛛启发式电动液压机器人软关节驱动(SES)装置。SES驱动器吸收了线性Peano-HASEL执行器和旋转袋状电机的特性,具有高比扭矩(可与电磁式伺服电机相比)、快速操作(演示高达24Hz)、低功耗和反驱动能力,全部采用轻量级设计。
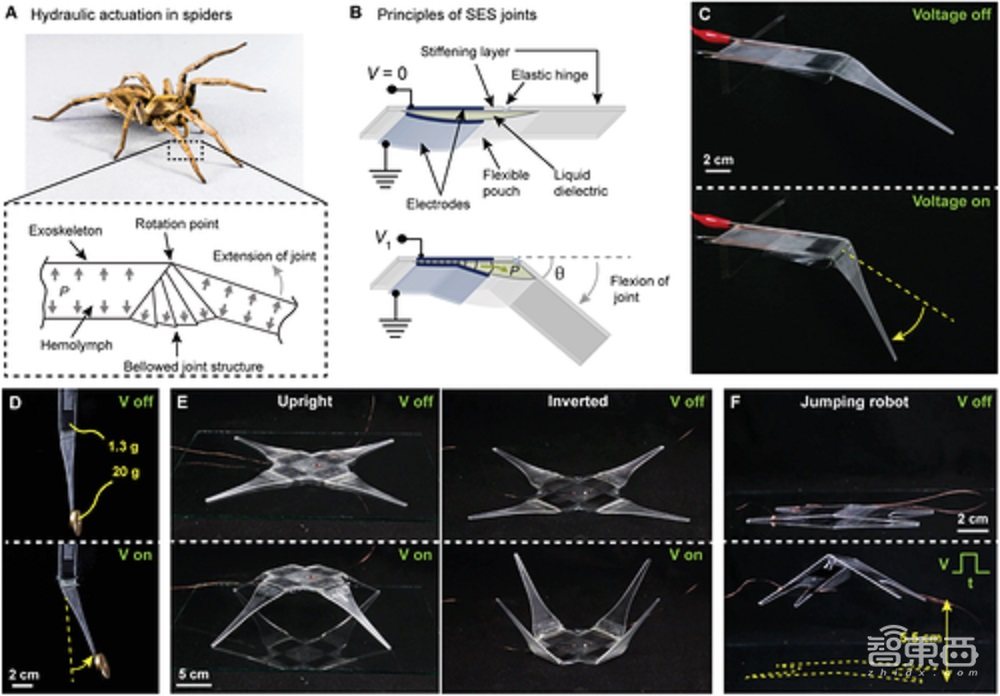
▲由蜘蛛腿部液压启发的SES驱动器原理
其中关键部件就是研究人员制作的由薄塑料薄膜(聚酯或聚丙烯都可以)制成的柔性袋,其中填充了液体电介质——一种植物油。然后研究人员在袋子的每一侧放置了电极,让这些充满液体的柔性袋用作驱动器,通过静电力产生液压动力。柔性袋连接到旋转接头,当在电极之间施加高电压时,静电力会导致液体电介质在柔性袋内移动,接头会弯曲。SES关节能够旋转高达70度,产生高扭矩,并且可以轻松恢复到起始位置。
“SES关节非常简单和轻便,因为没有外围组件会加重机器人的负担,”马克斯普朗克研究所机器人材料部主任克里斯托夫·开普林格(Christoph Keplinger)说:“软体机器人的许多应用,都需要多功能执行器。这些受蜘蛛启发的关节具有很高的功能性,并且只消耗很少的能量,它们制造起来既简单又便宜,我们使用的是塑料用食品包装,而且这些产品很容易延展。这些都是对机器人设计至关重要的品质,机器人可以采用多种不同的方式移动并操纵各种物体,而不会破坏它们。”
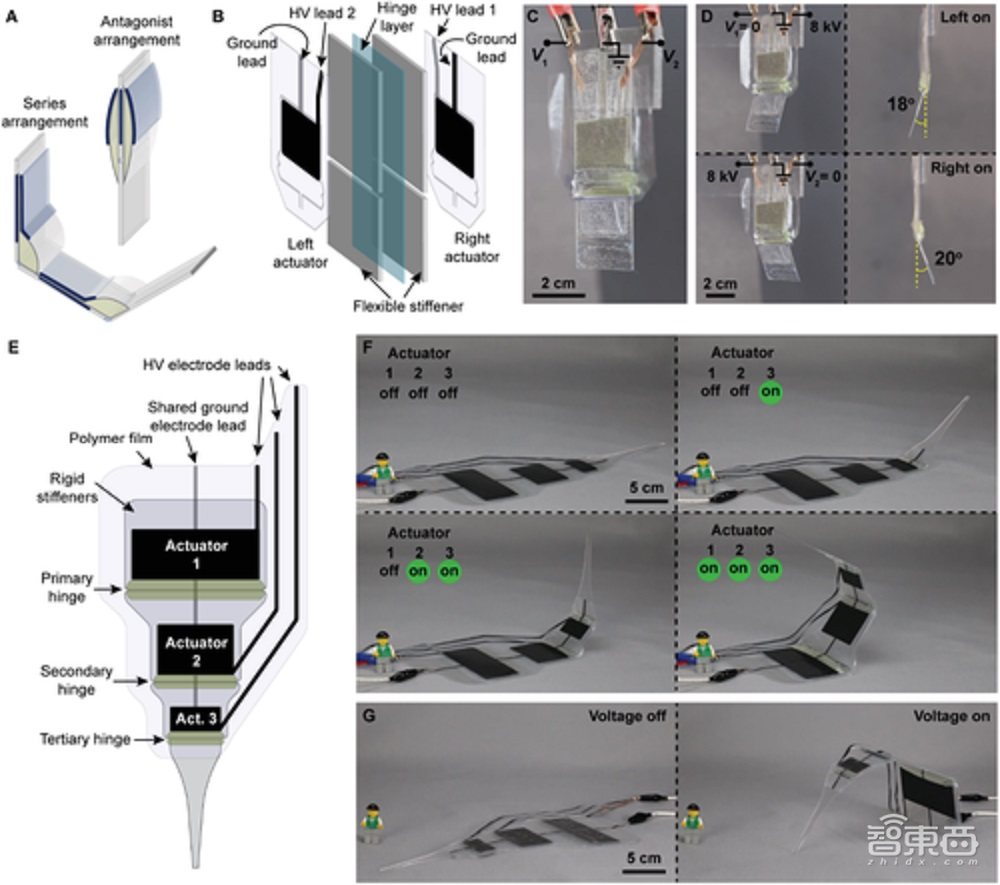
▲多节假肢式机器人
科学家们分别展示了双向关节、多节假肢和三指抓手机器人,它们都可以轻松抓取小巧的物体。
三指抓手是该团队使用SES关节展示其多功能性的一种应用。研究人员为抓手配备了类似肌肉的结构,以抓住阻碍其运动的物体。使用SES接头作为抓手的连接装置,需要的空间会小很多。
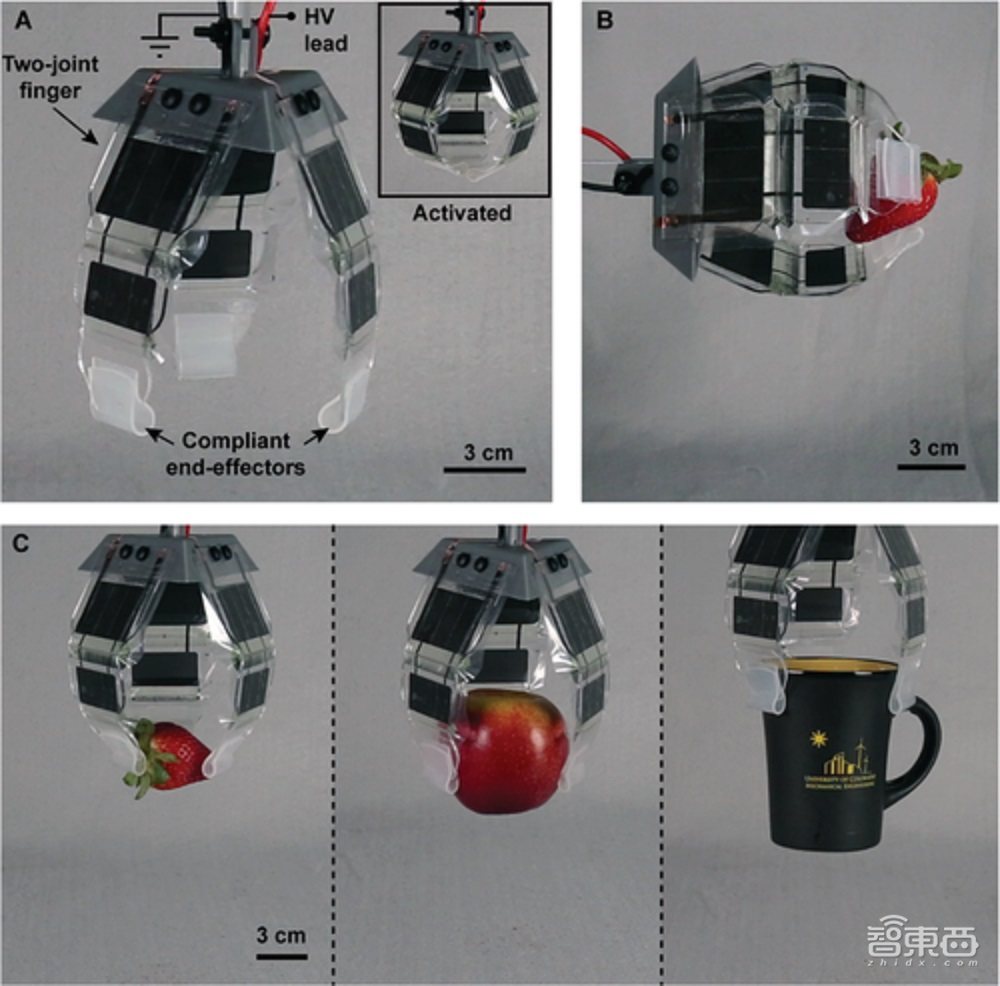
▲三指抓手式机器人
该论文的第一作者尼古拉斯·凯拉里斯(Nicholas Kellaris)说:“这项研究之所以引人注目,是因为我们可以使用多种材料,甚至是用来制作薯片袋的塑料来制作柔性袋。这样我们就可以在各种几何形状中使用SES,并具有专门调整的驱动特性。”
论文第二作者菲利普·罗特蒙德(Philipp Rothemund)补充道:“我们研究的最终目标不是制造蜘蛛机器人。我们想开发一种最先进的主动关节,您可以将其放入任何类型的机器人中。”
特别是对于只有几厘米大小的小型机器人系统,有限的空间严重限制了执行器技术的选择,SES关节将非常有用。对于软体机器人领域来说,这项发明确实是一个飞跃。
三、SES在关节处直接集成驱动,性能更高
使用SES制作的机器人关节在扭矩输出、比扭矩、关键速度、能量消耗等方面均有突出表现:
SES关节扭矩输出更高。最小能量型介电柔性关节扭矩输出为2.3mN.m,而SES关节的扭矩输出超过70mN.m。此外,与连续式HASEL相比,由SES关节制成的夹持器能够大幅提高稳定性和抓握力,从而实现更灵活的操作。
比扭矩(N.m.kg−1)即驱动器每立方厘米的上受到的扭矩力,是衡量旋转式驱动器的一个重要度量指标,驱动器此指标数值越高则性能越突出。SES关节在此项指标性能上可与电磁驱动器相媲美,后者是厘米尺度机器人系统的黄金标准。当归一化驱动器质量(1.36g)时,SES比扭矩高达21.2N.m.kg−1。根据德米扎基斯(Dermitzakis)等人的研究,各种伺服电机可达到最大比扭矩约为15N.m.kg−1(扭矩大小与伺服电机尺寸无关)。SES比扭矩表现极佳。
SES关键速度快,测量出的滚转频率为24赫兹,激活时间低至12毫秒。与依赖于系统内外热量缓慢扩散的热驱动系统相比,SES关节所采用的静电机制既快速又可扩展到大型阵列。
以SES关节基础的电液压装置在模型系统中显示出了20%的效率,此外,SES关节表现出捕获状态,这意味着它们在保持一个驱动状态时消耗很少能量,与状态之间的转换相比,保持一个驱动状态时的能量消耗减少了80倍。
SES关节的固有捕获状态,将有助于创建高效的多自由度机器人系统,允许从不连续驱动的关节获得最小的能量(例如,稳定组件)。此外,其静电致动器,可以通过实施电荷回收系统来提高表观效率,此前压电致动器中使用的电荷回收系统可以回收致动过程中50%以上的能量。与传统的流体驱动相比,SES关节无需流体管路和控制阀,而是易于成型的平面电气连接。
SES关节可以应用于各种关节机器人设计,利用机器人结构固有的机械部件为关节提供必要的支持层。此外,它们的电气操作是无声的,并允许执行器输出的直接电气到机械控制。电液系统的控制可以通过使用外部传感器的闭环控制方法来增强,甚至可以利用其使用电容测量自我感知变形状态的固有能力。
结语:SES为微型机器人提供更多可能
机器人关节驱动装置是机器人的动力来源,可分为液压式、气动式、电磁式和广义元件式等多种类型。因为电机具有启动速度快、调试范围广、过载能力强等优势,使用电机的电磁驱动方式最为常见。之前的液压驱动式装置存在耗能大、漏液、维护成本高等缺点,限制了在机器人中的应用。而SES的出现改善了机器人液压式驱动装置的一些性能,实现更强的输出能力,更小的安装空间,更省的能量消耗。
SES装置的优点还在于可以使用多种材料来制作其中的柔性袋部件,即使是薯片包装袋材料也可以,SES使用范围更加广泛。而可以在更小安装空间上使用,则是厘米级机器人关节驱动装置又多了更多选择。SES很可能在微型机器人领域发挥重要作用。
来源:Science Daily、Wiley
