








智东西(公众号:zhidxcom)
编辑 | 云鹏
智东西6月21日消息,前不久,GTIC 2021嵌入式AI创新峰会在北京圆满收官,迦智科技产品总监吴俊翔在峰会上带来了以《AMR机器人多传感器融合定位的发展趋势》主题的分享。
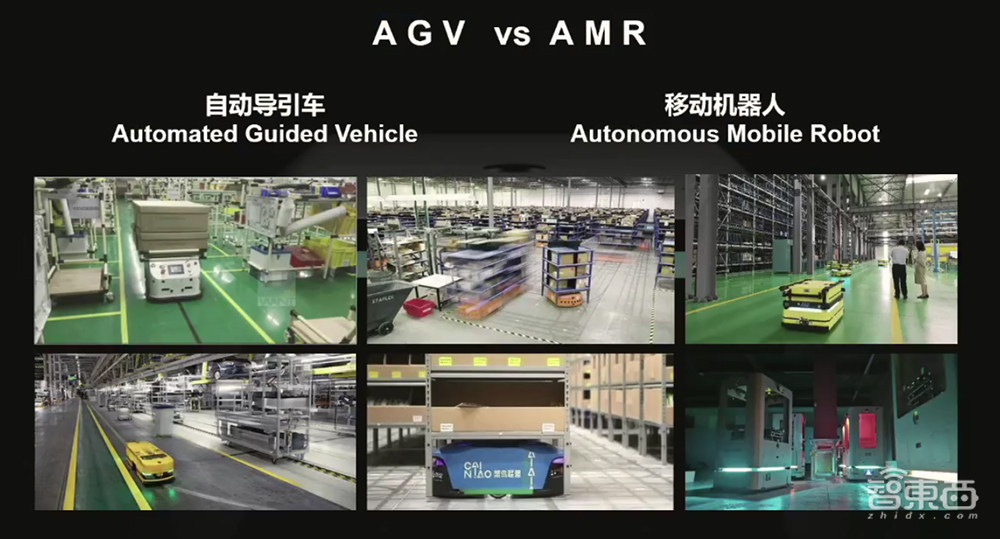
从基于磁钉、磁条的自动导引车(AGV)到新一代移动机器人(AMR),迦智科技开始基于地图的环境感知能力与智能决策,寻求差异化的自主导航能力。通过AI机器视觉与激光雷达融合建图与定位,团队产品实现了更加精准及时的定位导航以及多机器人协作。

一、让机器人送货就像“滴滴打车”
吴俊翔说,工业这条赛道,问题还很多。随着这两年越来越多的人用上扫地机器人,有时候我们带着产品到一些展会,很多人问我们是不是大号的扫地机器人?

实际上我们做的是工业移动机器人,首先运行于工业场景的半结构化环境。什么是半结构化?工业场景里面做SLAM技术的时候,很多时候依赖于固定的环境。
比如在过去AGV依赖二维码,需要标识。现在需要移动机器人有一些自主的导航能力,我们希望观测环境中现有的标志物,比如工厂的基台、设备、立柱半结构化的环境。
相较于自动驾驶的开放道路又有一些差异,实际上大家做一个对比的时候,觉得自动驾驶是不是一个挑战更高的环境?自动驾驶在初始阶段很多时候AI算法在做车道线、红绿灯、行人的识别,这些实际上都是非常结构化的标志和模型。
在工业环境中碰到的环境,比如地面的纹理、基台的环境,很多时候是非标的,是半结构化的。
第二个区别于扫地机器人的是交互上的不同,扫地机器人面向的大众消费者,并没有受过专业训练,在工业环境里面很多工人原来操作过生产线上的设备,帮助受过训练的工人能更好地去用到工业机器人。
第三,和过去在制造业里面所用到的物流机器人最大的一点区别是,AMR具备自主的导航能力,通过自适应导航能力实现绕障和动态路线规划。
很多时候我们交付方案的时候,是为制造业的客户交付一个生产线内的“滴滴打车”,让他们轻松满足A点到B点实时的物料搬运需求。

二、多传感器融合定位解决自主导航、自主决策
最早在汽车制造行业,磁钉磁条为主的导航方式用的非常多,沿着既定的路线去行驶。随着2000年左右亚马逊Amazon仓储机器人的诞生,在国内像极智嘉为代表的一些企业也在京东、阿里物流仓储领域有着广泛的应用。今天我们看到,越来越多的制造业的产线开始选择导入以SLAM激光导航为主的AMR机器人。
吴俊翔说,AMR机器人是行业里面比较新的概念, 欧洲的CE认证、ISO标准更多还是针对叉车这类工业车辆提出的标准。
去年ANSI标准中的工业移动机器人安全标准里明确提出了AMR定义,工业场景下具备自主的导航能力,我们才称之为AMR。
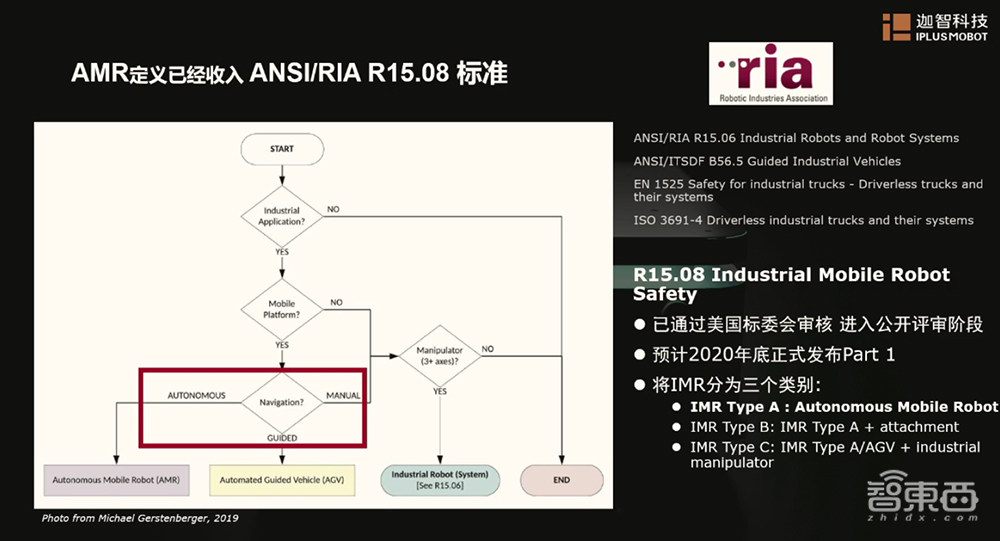
同时,AMR对应都算“industrial Mobile Robot”,另外还有不同的类别,比如ABC三个类别,B类指的是和其它一些载具做一些配合,C类和我们的机械臂做一些结合应用。
从AMR的定义或者行业的应用来说,自主导航能力是非常大的一个差异,在于对于地图的环境感知能力和自主决策能力差异。
这对我们在产品的设计、解决一些落地应用问题时提出非常多的挑战。为什么我们要去说多传感器融合定位这样一个技术?它会很好地帮助弥补单一传感器带来的可观性缺陷,相信不管是在工业移动机器人应用,还是在无人驾驶里面都是解决这样的问题。
有一些在工业场景里面用的单线激光雷达,更多只能扫到激光雷达所处的平面。如何做到在整个环境中有一个可靠的感知?我们还是通过深度相机做融合的定位导航。
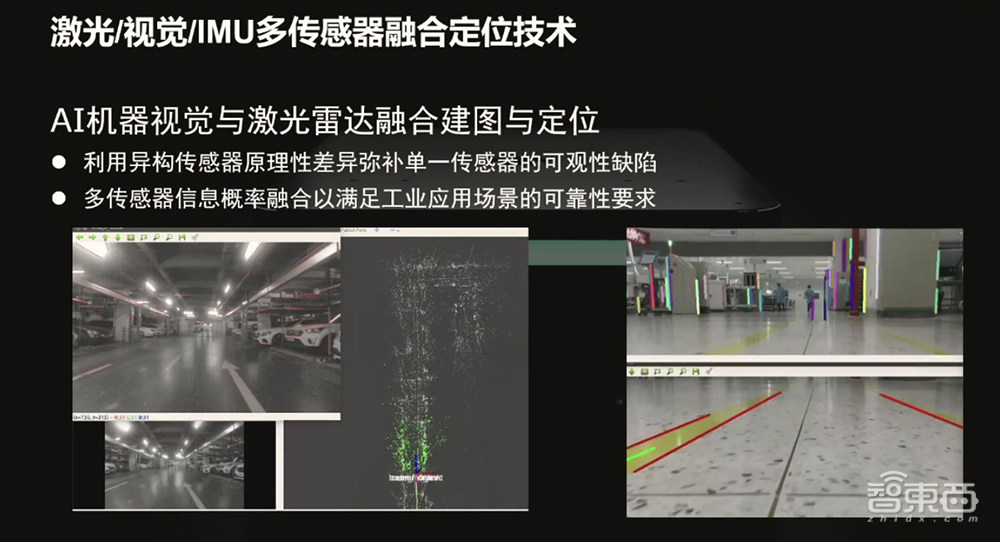
在传感器的加持下实现类似于采用车道巡线的能力,在制造业环境里面有很多生产线现有的标志和标线可以用于机器人的辅助定位和导航。还有地面纹理的导航,可以提升传感器的可观性和落地场景可靠性。
吴俊翔说,我们做多传感器融合的时候,发现与自动驾驶相比,自动驾驶很多时候依赖全局的GPS定位,室内没有GPS,我们要做时间的同步,多传感器时间数据帧同步,多传感器怎么做空间的同步?这里面不仅仅是一个算法的问题,而且是一个工程的问题。
迦智在这方面也做了很多工程的努力,提供方案做多传感器的标定。我们搭配复合机器人实现了两车的同步实时作业,不仅要去做多传感器之间的数据同步,而且还要做多机器人之间的同步。
三、十万平米工厂、动态环境变化,AMR落地挑战多
在这样一些应用下,AMR越来越多成为制造业的标配,AMR的智能自主决策和柔性能够更好地去适应制造业的场景和环境。
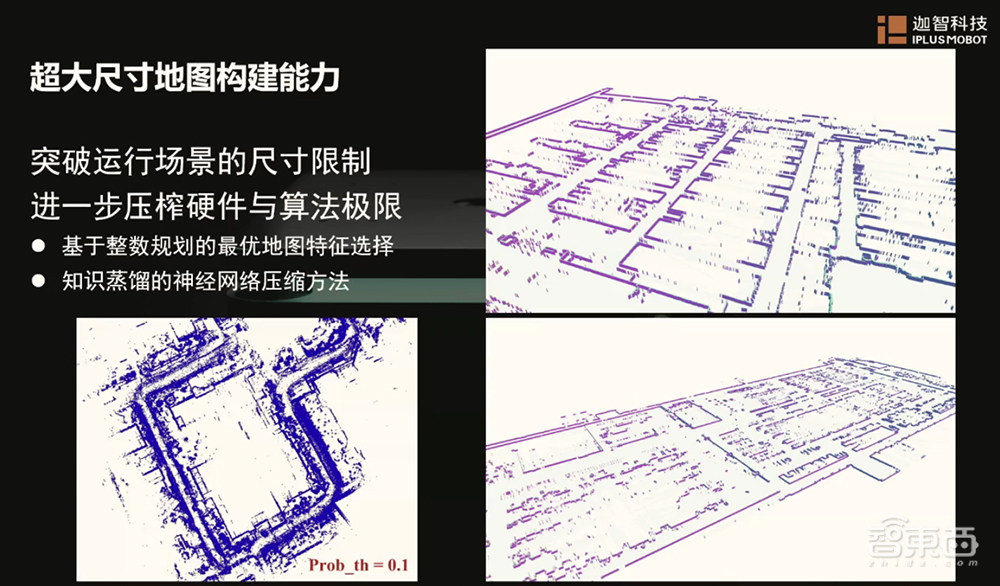
不过,在整个AMR落地应用中还是存在一些挑战,比如在计算资源受限的情况下,如何支持大范围的场景和落地?吴俊翔说,我们的很多工厂面积非常大,可能有一万平、五万平甚至十万平的工厂。
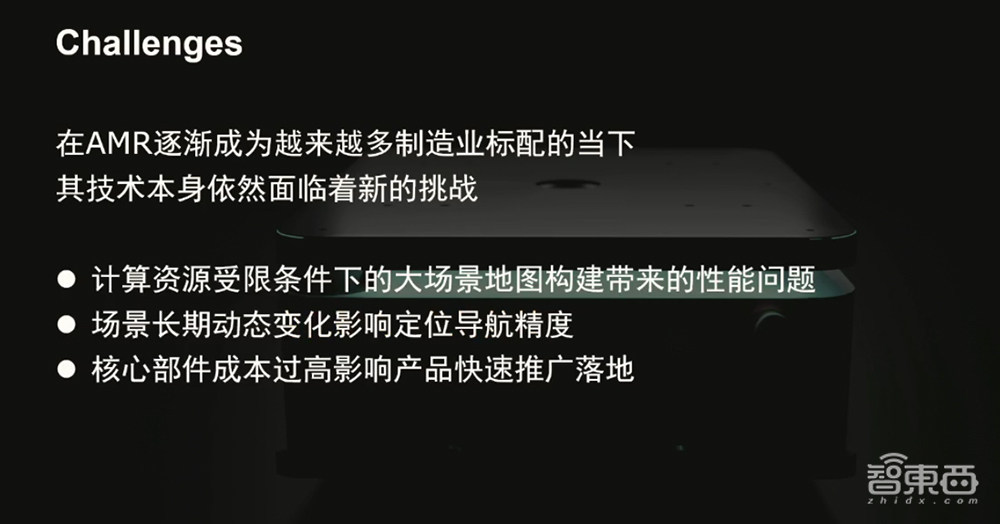
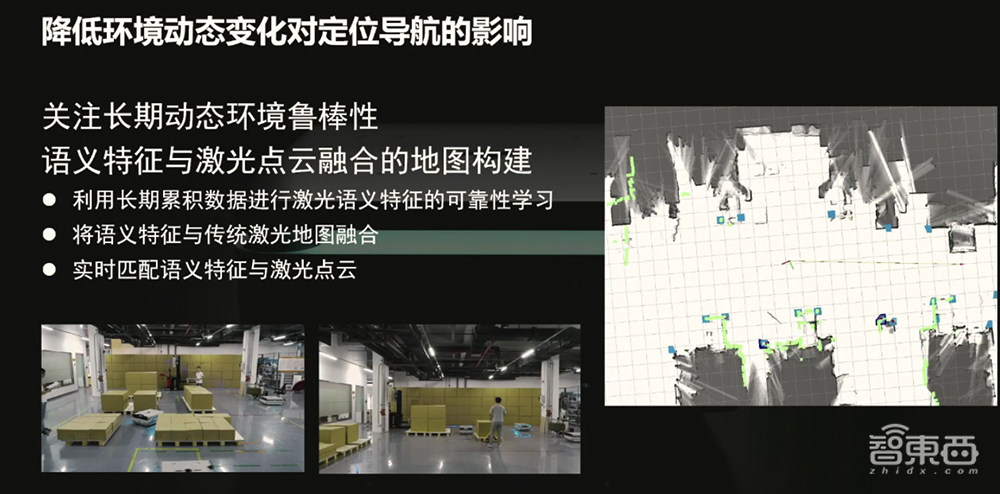
第二,长期的动态环境变化对于我们自主导航的影响。第三,核心部件成本,比如现在用到的激光雷达,符合工业安全标准的激光雷达目前来说成本还是比较高的,显然用摄像头或者其它一些传感器也是能够提供一个更经济的解决方案。
为了应对挑战,迦智做了大范围的建图能力,通过整数规划对全场比如工业场景下面做了最优地图特征的选择,采用了知识蒸馏神经网络的压缩算法,这样的话能够极大地压缩整个地图的尺寸。
对于环境变化所带来导航定位的影响,比如汽车生产线两边都有着非常多流动的工人,而且物料每天不同的批次随时发生变化。制造业的线边仓物料随着生产随时在流转;成品地推库旁边堆着一批货,今天下午就发出去了,如何应对这样一些挑战?我们会长期去做动态环境下面的检测,累计整个激光语义数据,将我们的语义特征与激光点云做结合。
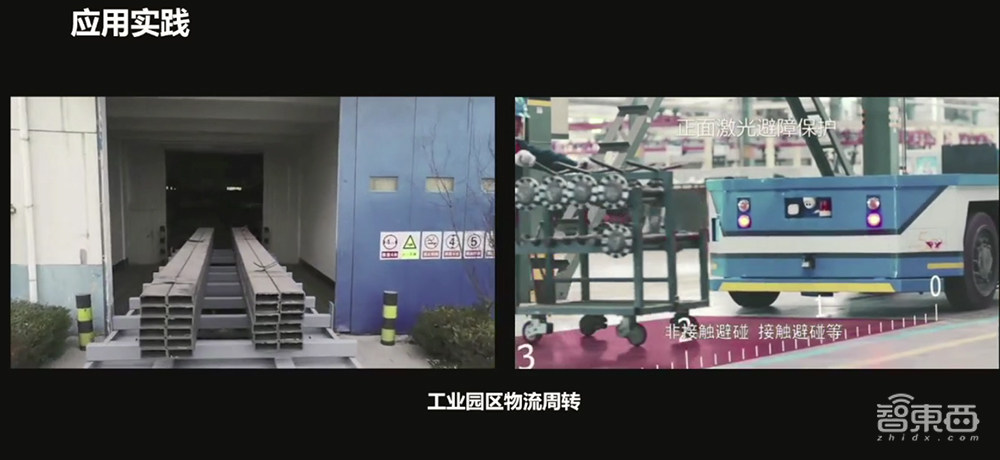
针对托盘和栈板识别,迦智在很多制造业园区提供工业园区级的物流技术和方案。采用了激光雷达,甚至是毫米波雷达,去做整体的传感器融合。它能够提供更好的能力,支持更丰富的感知条件下的物体跟踪与检测。
最后,对于3D环境,室外的环境我们还会做点云分割与地图构建。室外环境更加复杂,有人、车、道路、环境,测试道路在雨天环境、在中雨的环境也能去运行,极大地满足了很多工业场景下面对于物料运输的要求。

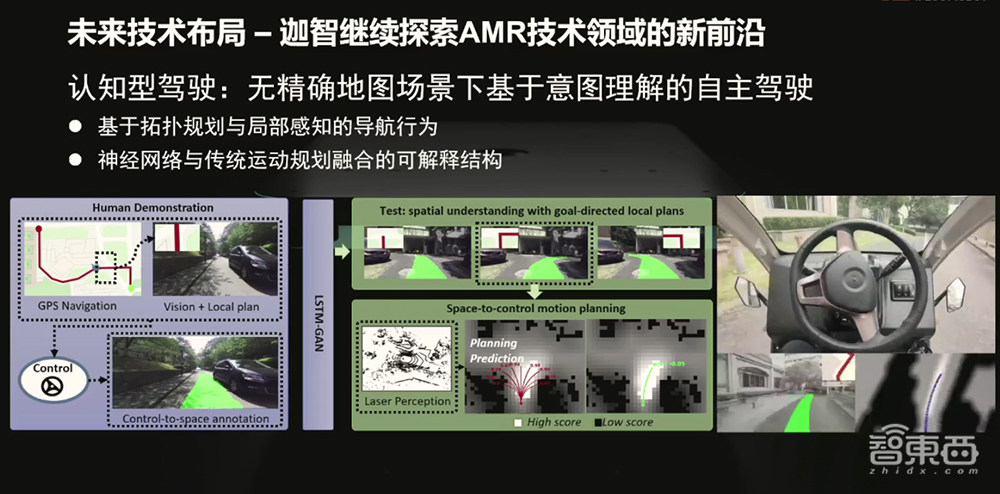
迦智的技术团队很多来自于浙江大学机器人实验室,迦智自己的算法团队也和实验室这边一起做了预研,我们的落地部署当中需要工程人员对现场环境做一次建图,如果能够取代第一次建图的环境,我们能够在没有精确地图的情况下,直接在园区中理解驾驶意图,能够很好地帮助我们后期的工程落地。
回到技术和落地和应用,这是两个现在非常典型的服务客户场景。首先在3C制造业,我经常被问到,你们既然说工业移动机器人AMR技术这么好,和传统AGV相比优势体现在哪里?
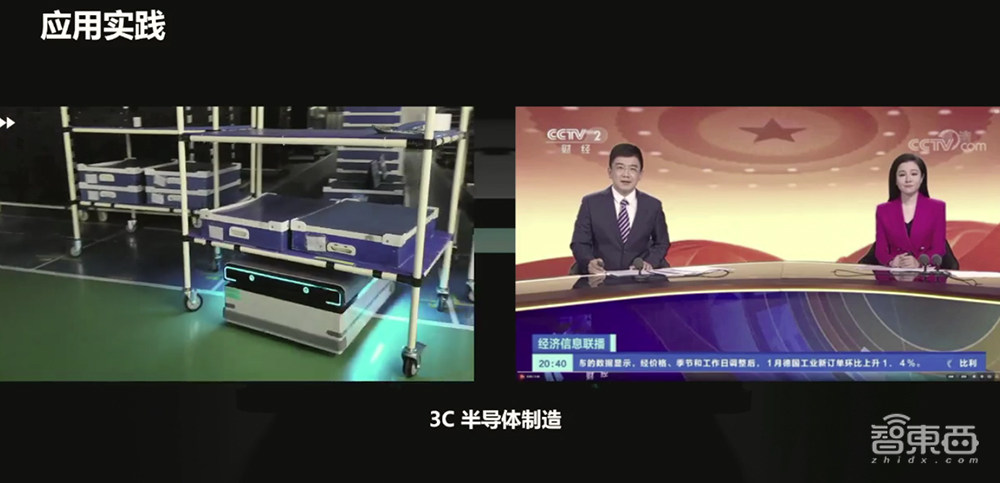
这个就是一个非常典型的应用,我们在3C制造的产线会有很多机器和工人配合的场景,地上放的线框辅助工人把料车放到线框内,由机器人去做一个取放操作。通过激光和多产线融合技术,对这个料架做一个精准模板的匹配,只要放在线框内,可以做一个模糊的动态判断,这样的话实现机器和人的柔性配合。
在室外的园区物流提供的方案,不仅能够在室外,而且室内和室外做了打通,基于全场做的3D激光点云地图,加上传感器。这样的好处是什么?我们能够在没有GPS的情况下去做园区级的物流。
迦智在2016年成立以来业服务了超过两百多家客户,从数字化生产车间到熄灯工厂,迦智与客户一同见证智造中国的制造进程。
迦智的创始人董事长是熊蓉教授,也是浙江大学控制学院机器人实验室主任,中控褚健老师是战略顾问。去年我们参与了行业的标准制定,比如AMR联盟团体的标准,同时我们在华为牵头下参与了5G和工业物流解决方案的蓝皮书制定。
以上是吴俊翔演讲内容的完整整理。
