








智东西(公众号:zhidxcom)
编译 | 杨畅
编辑 | Panken
智东西7月15日消息,近日,美国麻省理工学院研究人员研发了一种新算法,能让机器人灵活地帮人类穿衣服。
据悉,该算法可为机器人找到有效的运动规划,能确保人类人身安全,并避免“机器人冻结”问题。
一、让机器人穿衣服,要克服这两大难题
让机器人给人类穿衣服,听起来容易,要做到则需攻克技术难题。
一个人帮朋友往杯子里到咖啡很容易,但对机器人说,要学会这个看似简单的任务,它需要仔细观察和理解人类的行为。
因为机器人不具备像人一样控制自身行为的意识和能力,所以要实现机器人和人类的安全交互,需要对机器人的行为进行系统的规划和协调。
如果能构建正确适当的人体运动建模(包含人类如何移动、反应和响应),那么机器人就能流畅地与人交互,但在很多情况下,完美无缺的建模并不存在。
例如,如果让家用机器人使用一种简单的默认模型,来教机器人如何帮人穿衣服,这个模型不会解释人类反应存在很大的不确定性,跟每个人的个性、习惯都有关系。
比如,给蹒跚学步的孩子穿衣服,和给不太灵活还虚弱的老人、或容易疲劳的残障人士穿衣服,需要用到不同的方法。
如果仅根据默认的模型进行轨迹规划,那么机器人可能会碰伤人类。但如果在确保人类安全方面过于保守,那机器人可能会认为附近空间活动都不安全,因而不会移动,则又出现“机器人冻结(Freezing Robot)”的问题。
二、模型预测控制(MPC)算法保证人类安全
人机交互时,机器人采用的安全方法包括预测和反应。预测方法允许机器人预测人类行为,同时规划无碰撞运动。反应方法是使机器人能够实时检测碰撞,并在碰撞时做出相应反应以减少和人接触产生的力。
这项研究论文的第一作者、麻省理工学院的博士Shen Li说:“在不影响任务效率的前提下,开发算法来防止机器人对人类身体造成伤害是一项关键挑战。”
研究人员首先对“安全”进行了重新的定义,在之前的相关研究中,对于人机交互预测和反应方法方面的人身安全定义是:避免碰撞和减少接触产生的力。
通过结合这两个定义,研究人员在人类感知运动规划(HAMP)的背景下重新定义“安全”为:避免碰撞和发生碰撞时产生的安全冲击两个方面。
对比之前的方法,很多方法都是按顺序集成预测和反应方法,机器人首先使用运动规划器来寻找路径,然后使用兼容控制器来执行。但两者方法是分别优化其自身特定目标,而不是两种方法保持同一个目标。
针对这些情况,本研究的研究人员提出了一种安全规划器,在一个框架内集成预测和反应方法。
结合Koller等学者的研究,研究人员还开发了一种模型预测控制算法。根据他们自己的定义,即使人类的动态模型不确定,这个算法也能保证人类的安全。
该团队的算法对于人类建模中的不确定性信息进行了推理,他们不是让机器人只了解一种涉及潜在反应的单一默认模型,而是让机器人学习更多可能的模型,来更接近人类,模仿人类如何理解其他人。随着机器人收集数据地不断增加,它会自己减少不确定性并改进这些人类行为模型。
例如,假设人类对穿衣的反应有两种可能的模型。“模式一”是人在穿衣时向上移动,“模式二”是人在穿衣时向下移动。借助团队的算法,当机器人计划其运动时,它不会选择一种模型,而是会尽量确保两种模式都是安全的。无论人是向上还是向下移动,机器人找到的行动轨迹都能保证人的安全。
三、成功在确保安全前提下给人穿衣服
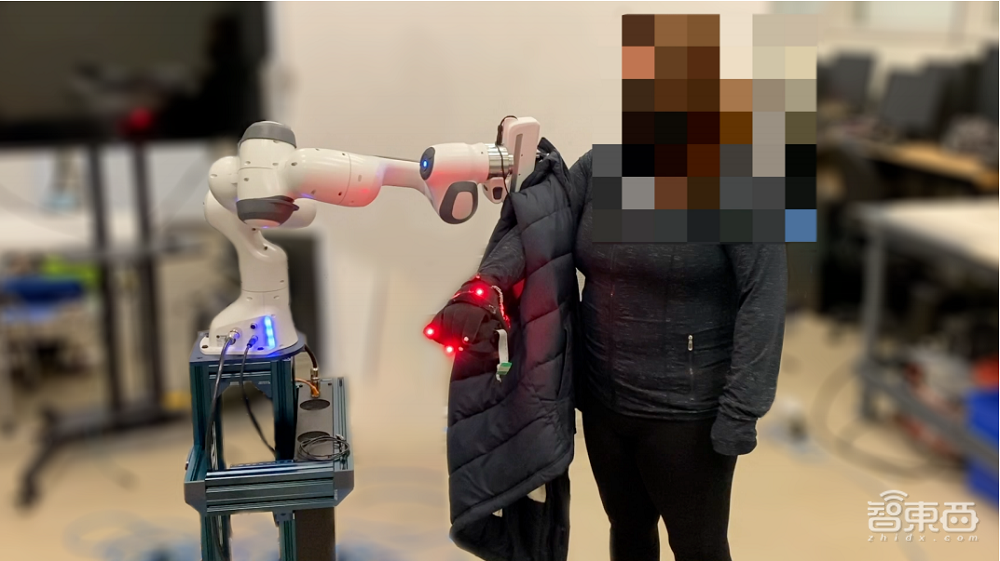
在实验中,机器人帮助人类穿上夹克,证明这种算法是一种强大的工具,它能让机器人更精准高效地帮助行动不便的人。
除了关注人类身体是否安全之外,未来该团队的工作可能会集中在调查机器人辅助穿衣任务期间人类的主观感受。
美国卡内基梅隆大学机器人研究所助理教授Zackory Erickson说:“这种多方面的方法结合了集合理论、人类感知安全约束、人体运动预测和安全人机交互的反馈控制,有可能应用于各种辅助机器人场景,最终目标是使机器人能够为残障人士提供更安全的帮助。”
结语:人机交互安全性还有提升空间
从扫地机器人、厨师机器人、送餐机器人、看护机器人到本研究的穿衣机器人等等,机器人的种类和功能越来越多,使用的场景也在不断增多,尤其老人、小孩和残障人士,除了家人的照顾之外,未来机器人可能也会提供越来越多样的帮助。
机器人数量和使用范围的拓宽,人机交互更加密切。到目前,人机交互的安全性问题像这个穿衣机器人实验一样,只是在某一或某类特定场景下实验成功,其他场景还有待核验。人机交互的安全性还有不少可提升空间。
来源:Tech Xplore
