







智东西(公众号:zhidxcom)
编译 | 徐珊
编辑 | 云鹏
智东西8月12日消息,据《科学·机器人(Science Robotics)》报道,弗吉尼亚大学(University of Virginia School)教授Dan Quinn和他的研究团队结合生物学、流体动力学以及机器人技术打造了一个鱼状的机器人。
该机器人通过可编程的人造肌腱(tendon),在水中游动时可以调整自己的尾巴刚度(tail stiffness),并且提供更大的游动速度调节范围,还能减少能量消耗。
他们讲述了水下航行器(underwater vehicle)实现变速任务的关键要点——像游动的鱼学习。因为通过研究他们发现,鱼在游动时可以通过调节尾部刚度来调节速度,不但能实时控制速度,而且能节省力量。
研究人员表示,该项研究将会给水下航行器的设计提供一定新的想法。
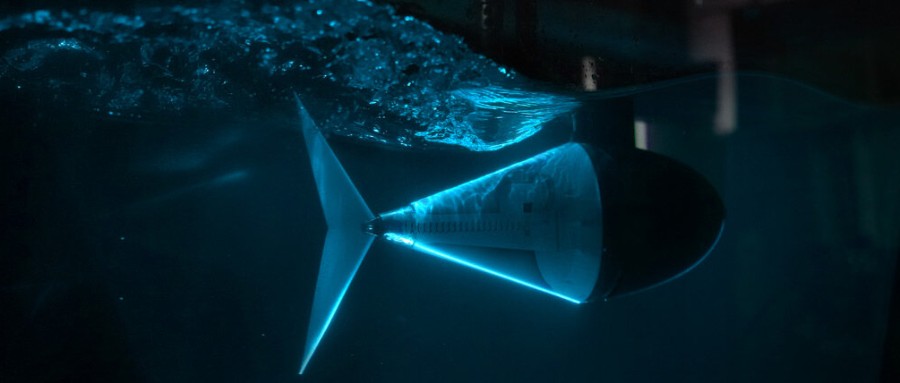
 ▲粒子图像测速仪展示了受金枪鱼启发的机器人背后的尾流。颜色表示水是逆时针(红色)还是顺时针(蓝色)旋转。(图片来源:弗吉尼亚大学)
▲粒子图像测速仪展示了受金枪鱼启发的机器人背后的尾流。颜色表示水是逆时针(红色)还是顺时针(蓝色)旋转。(图片来源:弗吉尼亚大学)
目前,水下航行器通常会设计成为以某种固定的速度巡航,而在其他模式下巡航速度和效率通常较为低下。与鱼类不但能游得好,还能控制游速的快或慢方式相比,有关水下航行器的变速技术还处于初级研究阶段。
该项研究题目为《可调刚度使鱼状机器人能够快速高效地游动(Tunable stiffness enables fast and efficient swimming in fish-like robots)》发布在8月11日的《科学·机器人》上。
论文链接:https://robotics.sciencemag.org/content/6/57/eabe4088

一、材料硬度难以把控?不如学鱼类自行调节尾部“硬度”
在设计游泳机器人(swimming robots)时,研究人员面对第一个难题是:推动机器人在水中向前驱动的零部件材料应该有什么程度的硬度?因为有些零部件的硬度在某种情况下可能运行良好,但遇到其他情况时很有可能会破碎。
Dan Quinn谈道,“(鱼形机器人的)尾部刚度就像自行车上的齿轮一样,你只能以一种速度提高效率。”他举了个例子,这种情况就像在山地里骑着不能变速的自行车,仅仅一小段路人们就会感到筋疲力尽。
而鱼类不同,它们将会根据不同情况来事实调整自己的尾部刚度。
二、建个模型,来看看游动的鱼尾如何变“硬”
接下来,研究人员又面对新的研究困境,目前没有已知的方法可以测量鱼的尾部刚度,人们也不清楚鱼是如何调整自己的尾部刚度。
经过一段时间研究后,Quinn和Zhong结合流体动力学和生物力学推导出一个模型,说明鱼类是怎样调整尾部刚度以及为什么调整尾部刚度,从而解决了这个困境。
 ▲Zhong作者和Dan Quinn展示了实验设置
▲Zhong作者和Dan Quinn展示了实验设置
“为了检验我们的理论,我们打造了一个鱼状机器人,它通过可编程的人造肌腱在水中游动时调整自己的尾巴刚度。(我们)突然间(发现),我们的机器人可以在更大的速度范围内变速。”同时他还表示,通过这种方式,鱼状机器人在相同速度下使用的能量不到过去的一半。
Quinn认为,“从所有的数学计算中得出一个简单的结果:随着速度增加,游动的鱼尾部硬度也会随之增加。”简单来说,鱼类在游动的时候,它们尾部刚度会增强。
研究人员Zhong表示,该项研究是第一个结合生物学、流体动力学以及机器人技术来全面研究尾部刚度的变化。这有助揭开尾部刚度是如何影响水生生物的游动速度谜团。
Zhong还谈到,“更奇妙的是,我们不仅专注于理论分析,而且还提出了可调节刚度策略的实用方案。我们提出的可调节刚度策略已被证明在现实游动任务中有效,比如,机器鱼(通过这种策略)实现了高速、实时调节、以及高效率的游动。”
三、不仅是机器鱼,还有机器海豚和蝌蚪!
该研究团队正准备将有关于可调节刚度的研究模型扩展到其他类型的游泳机器人上。
他们所打造的第一个鱼类机器人是模仿金枪鱼所设计的,目前,该团队正在考虑如何将这个模型应用的范围扩大,在海豚或蝌蚪大小的机器人上同样适用。此外,他们还在研究通过机器人来模拟黄貂鱼(undulatory)的起伏运动(stingrays)。
“我认为我们的研究项目不会很快结束。我们观察过的每一种水生动物都给了我们新的灵感去建造更好的游泳机器人”,Quinn还幽默地说道,“而且海里有更多的鱼”。
结语:生物学将为机器人研究带来更多可能
弗吉尼亚大学的研究人员通过研究鱼的尾部刚度变化,并建立可调节刚度研究模型后,得到了一些设计水下航行器的灵感。
如今,越来越多机器人的研究困境可以在自然界生物上得到解决。机器人等技术的发展也同样为生物研究带来了更多生机。一方面,科研人员通过研究自然界的不同生物打造出不同类型的机器人,为人们带来更多的便捷生活,另一方面,科研人员通过建立数据模型,更好地了解不同生物的特别之处。
此前,多国研究人员联合发布了首个为救援任务而设计的“机器”蟑螂,可以在任何环境中都能够实现自动导航和人类存在检测。
但目前的仿生机器人的应用多数处于试验性质,真正大规模量产应用,甚至真正在生活中应用,还有非常长的路要走,普及机器人的任务任重道远。
来源:Science Robotics
