








智东西(公众号:zhidxcom)
编译 | 杨畅
编辑 | Panken
智东西9月6日消息,美国克利夫兰诊所为仿生手臂开发的一项“神经-机器接口”新研究,刚刚登上了Science Robotics最新人机交互专刊封面。
通过在改造的仿生手臂装上微型机器人,患者能像正常人一样能去思考、决策、执行任务,不仅可以直接控制手臂运动,还能感受到手臂和手的运动、抓握和触摸,恢复基础的上肢运动能力。
这些发现是朝着实现截肢患者完全恢复自然手臂功能所迈出的重要一步。
该研究论文题目为《仿生上肢的假肢触觉、运动感觉和运动的神经机器人融合促进了内在的大脑行为(Neurorobotic fusion of prosthetic touch, kinesthesia, and movement in bionic upper limbs promotes intrinsic brain behaviors)》,于2021年9月1日发表在Science Robotics上。
论文链接:
https://www.science.org/doi/10.1126/scirobotics.abf3368
一、仿真手臂市场大,技术落后
根据2021年国际市场调研机构Grand View Research的相关报告,到2028年,全球假肢和矫形器市场预计将超过80亿美元。
但目前假肢研究已经遇到了机械障碍,它们不能实现许多日常生活中人体需要的直观感觉,比如说张开和合上双手。
根据美国克利夫兰诊所所勒纳研究所生物医学工程系副教授、研究通讯作者保罗·马拉斯科(Paul Marasco)的说法,由于佩戴传统假肢的人无法用四肢来感知环境,他们在日常生活中完成任务时的行为和没有截肢人的行为会不同。
例如,佩戴传统假肢的人在使用假肢时必须目不转睛地注视着假肢,并且当他们用力过大或过小时,很难学会纠正这些错误。

▲保罗·马拉斯科(Paul Marasco)
借助新的仿生手臂和先进的评估工具,研究人员可以看到研究参与者的大脑和行为策略发生了变化,与没有截肢的人可以相匹配。
研究参与者不再需要看他们的假肢,可以在不看的情况下找到东西,可以更有效地纠正错误。
马拉斯科说:“在过去的10年或20年里,假肢的进步帮助佩戴者实现了更好的功能,并自己管理日常生活。第一次,上肢截肢的人现在能够再次像健全人一样‘思考’,新仿生手臂可以为假肢佩戴者实现新程度无缝重新融入日常生活。”
针对这种情况,美国克利夫兰诊所研究人员牵头的国际团队(合作机构有加拿大阿尔伯塔大学和加拿大的新不伦瑞克大学)开发了一种新的仿生系统,来改装标准护理仿生手臂。
二、使用多个微型机器人刺激神经末梢
研究人员首先通过外科手术将被截肢患者手臂中之前用于控制被切除手臂部分(比如手指尖)的神经末梢,“plug”到截肢部位。
马拉斯科说:“你的大脑就像知道‘手指连接着一块肌肉,但不知道是肩膀上的肌肉,还是前臂上的肌肉’。”
然后研究人员将仿生手臂放在患者的截肢部位,微型机器人安装在仿生手臂接口的插座中,当患者与仿真手臂接触时,这些微型机器人会按压患者截肢部位的相关区域,刺激现在附着的神经末梢。
在定向感觉神经移植过程中,微型机器人触摸皮肤会激活感觉受体,使患者能够感知触觉。
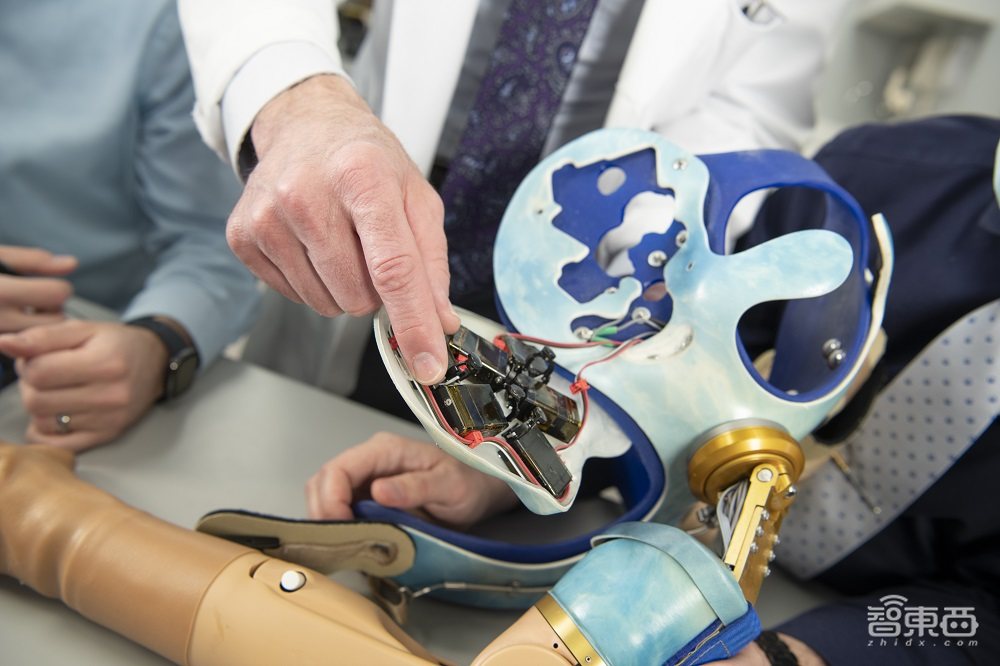
▲仿生手臂内部的机器人触摸系统。每个小黑匣子通过神经-机器接口界面为佩戴者提供单个手指感觉。
在定向运动神经移植过程中,患者想移动其四肢时,经过神经移植的肌肉会与计算机化的仿真手臂之间通过通信,实现以相同方式移动。
此外,微型但有力的机器人会振动这些肌肉中的动觉感受器,帮助仿真手臂佩戴者感知到他们的手和手臂在移动。
▲上肢截肢患者能如常人般使用仿生手臂,做出各种自然的行动。神经-机器接口与佩戴者的肢体神经相连。
当患者想要使用或移动仿真手臂时,它可以让患者将大脑中的神经脉冲发送到仿真手臂,并从环境中接收物理信息,然后通过神经将信息传回大脑。
研究人员修改了现有的仿真手臂,而不是从头开始研制新的仿真手臂,希望能够尽快将这些设备送到康复诊所,使其比传统的仿真手臂更具成本效益。
三、减少注视仿真手臂时间
这种仿真手臂系统结合了三种重要的感觉和运动方式:直观的运动控制(TMR-motor)、触摸(TSR-touch)和抓握运动感觉(TSRm-kinesthesia)。
研究人员在两名参与研究的上肢截肢志愿者身上测试了他们设计的新的仿真手臂,并发现这些截肢患者恢复了截肢前的反射行为,包括凭直觉的抓握和自然的眼球移动,即患者可以将视线从肢体上移开。

▲仿真手臂可以帮助佩戴在感受抓握运动和指尖在触摸物体,这些都通过佩戴者思维直接控制。佩戴者手臂和身体上的反光标记有助于计算机在3D环境中看到他们的动作,而眼镜则可以让计算机准确地看到佩戴者看到的东西。
参与者佩戴仿生手臂执行了需要手部和手臂功能的基本日常行为任务,研究人员通过他们新开发的评估工具,评估了佩戴这种仿生手臂的人、非残疾人和佩戴传统假肢的人各自的表现。

▲真实和虚拟的仿生手臂都非常灵巧,足以代表每个研究参与者通过他们的神经机器接口感受到的所有不同的手部运动产生的感觉。
在测试期间,一位上肢截肢的参与者使用仿生手臂,将易碎的纸杯从屏障的一边转移到另一边时,此时动作灵敏的相机会追踪她的眼睛运动,捕捉她手臂和身体上反射标记的运动。
拥有运动控制、触摸与运动感知后,她的动作更像一个没有截肢的人。
该仿真手臂可能是第一个同时多种测试结果优于典型仿真手臂的仿真手臂。
研究人员还比较了同时启用和单独启用三种感觉和运动方式时,参与者的表现情况。
他们使用仿真手臂效率和盈利能力(PEP)评估来量化,个人如何有效地使用反馈来通知与整体运动表现相关的感官,进行辨别决策。同时启用触觉和抓握运动感觉时,两位参与者的运动刚度辨别精度显著提高,高于单独的直观的运动控制。

▲美国克利夫兰诊所开发的PEP测试。该测试提供了关于个体通过使用其触觉和抓握运动感觉,来在干扰物中寻找不同刚度块时,所做出的决定的类型的洞察。
参与者的识别和处理速度也有所提高,其中一位参与者识别时间为4.01s-7.75s,处理时间为2.57s-4.53s。启用三种感觉和运动方式时,效果更好。
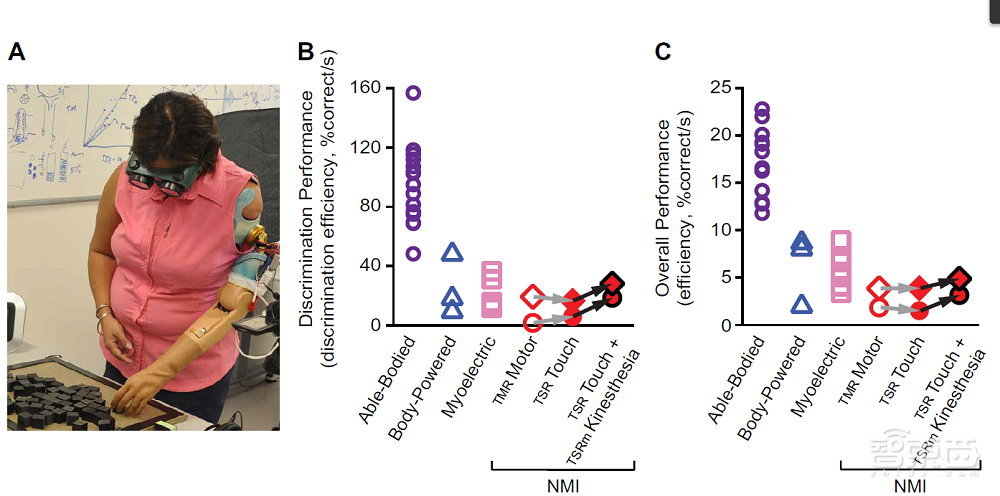
▲执行测试的参与者的实验数据,C图是佩戴仿生手臂时测试的结果,y轴显示参与者的效率得分,以每秒正确刚性块百分比来衡量
研究人员使用凝视和运动评估(GaMA)协议量化参与者的视觉注视和运动情况。同时启用触觉和抓握运动感觉时,两位参与者目光注视在仿真手臂上的时间更少,增加了对自己抓起杯子的信心。
马拉斯科谈道:“也许我们最兴奋的是,他们像没有截肢的人一样,可以对错误做出判断、决定、计算和纠正。”
结语:仿生假肢市场潜力大,但实验室产品落地时间有不确定性
研究人员通过改造现有仿生手臂,想要更快的将这种技术推广。改造后的仿生手臂结合三种感觉和运动方式,上肢截肢者第一次能像身体健全的人一样再次恢复自然运动和感知能力。
除此之外,其他实验室还有很多仿生假肢的实验取得成功,但是这些成功的产品仍处于实验室测试阶段,具体的商业化落地时间还不能确定。
来源:Science、CNET、Cleveland Clinic
