








智东西(公众号:zhidxcom)
编译 | 程茜
编辑 | 李水青
智东西11月30日消息,本周一,据外媒Tech Xplore报道,来自美国塔夫茨大学(Tufts University)和佛蒙特大学(University of Vermont,UVM)的研发团队创造了第一个可以进行自我复制的活体机器人,基于非洲青蛙细胞结构的活体机器人Xenobots。
数十亿年来,生物体已经进化出多种复制方式,从萌芽植物到有性动物再到入侵病毒等方式。现在,科学家们发现了一种全新的生物繁殖形式,并创造了有史以来第一个自我复制的活体机器人。
目前,这一最新研究成果在2021年10月22日刊登于顶级期刊《美国国家科学院院刊(PNAS))》,论文题目为《可重构生物体中的运动学自我复制(Kinematic self-replication in reconfigurable organisms)》
链接:https://www.pnas.org/content/118/49/e2112672118
2020年1月该团队发布的首个活体机器人Xenobots就已经登上《美国国家科学院院刊》的封面。该研究提出并实现了用计算机设计生物体的概念,创造了基于青蛙DNA的可编程活体机器人Xenobots。
今年4月,该团队又成功开发了第二代微型生物机器人Xenobots,同样基于非洲青蛙细胞构建,相比于第一代,它的移速更快,寿命更长,能更好地适应各种环境。
一、“吃豆人”形状,细胞繁殖翻倍
活体机器人的研究团队利用从青蛙胚胎中提取的活细胞在UVM的超级计算机上进行设计,然后由塔夫茨大学的生物学家进行组装和测试,重置青蛙细胞的结构。活体机器人Xenobots的大小只有几毫米,能按照计算机程序设计的路线移动,还能负载一定的重量。
与传统机器人不同,Xenobots不是由金属、混凝土或塑料制成,而是100%由青蛙细胞创造出的一种新生命体。
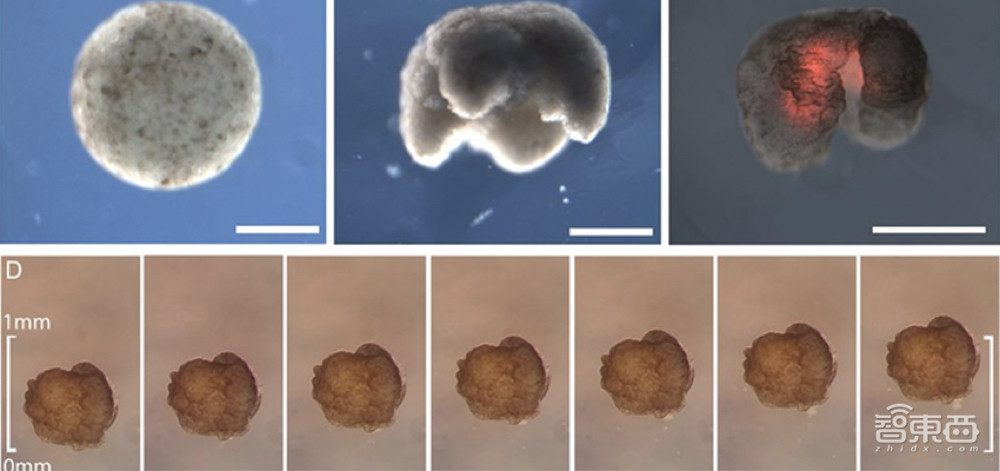
▲活体机器人的细胞形态
美国塔夫茨大学和佛蒙特大学的研发团队发现,Xenobot的母体由大约3000个细胞组成,形成细胞球,可以在培养基中移动。然后研究人员将一组解离的细胞与细胞球一起放置在培养基中。几天后,它们就会变成外观和动作都和自己一样的新活体机器人。
当细胞球在圆圈中旋转时,它们在追踪的圆圈的中心创建了一簇细胞,可以将移动细胞球的路径想象成甜甜圈,细胞在甜甜圈的孔中形成一堆。而且,由于这些松散的细胞有自我粘附功能,这些新的Xenobots就可以出去寻找细胞,并多次建立自己的副本。
如果研究人员将足够多的活体机器人彼此靠近放置在培养基中,它们的集体运动就会开始堆积其他漂浮在溶液中的松散青蛙细胞。一旦足够多的细胞堆叠在一起,大约50个细胞的聚集堆就成为活体机器人的一种后代,能够自行移动,并在此过程中堆积自己的后代。该过程就是运动学的自我复制过程,在运动中产生后代。
运动学的自我复制曾在开采卫星和小行星以获取矿石和其他材料、建造月球工厂,甚至在太空建造太阳能卫星的分子机器和模型中出现过,从未在像活体机器人这样的活体、多细胞系统中出现过。
▲活体机器人的复制过程(GIF截取自CNN)
“这些细胞可以‘生孩子’,但之后母体通常会消亡。实际上,让母体继续繁殖是非常困难的。”克里格曼说。但是,通过UVM的佛蒙特州高级计算核心的Deep Green超级计算机集群上运行的人工智能程序,进化算法能够在模拟中测试数十亿种形态,如三角形、正方形、金字塔形状、海星形状等,以找到可以让细胞的运动学自我复制更有效的形状。
“我们让UVM的超级计算机弄清楚如何调整最初‘父母’的形状,经过几个月的努力,人工智能想出了一些奇怪的设计,包括一个类似于‘吃豆人’的设计。”克里格曼说,“这是非常不直观的。它看起来很简单,但它不是人类工程师会想出的。为什么只有一张小嘴?为什么不是五个?我们将结果发送给道格,他建造了这些吃豆人形状的父母异种机器人……然后那些父母生了孩子,生了孙子,生了曾孙,又生了曾曾孙。”

▲活体机器人吃豆人形态的复制过程(GIF截取自CNN)
换句话说,正确的“吃豆人”设计极大地延长了细胞繁殖的世代数。
“有了正确的设计,它们就会自发地进行自我复制。”佛蒙特大学计算机科学家和机器人专家乔舒亚·邦加德说,他是这项新研究的共同领导者。
活体机器人的自我复制从青蛙卵中分离胚胎细胞开始。在细胞的许多有趣特性中,有两个与这项工作有关。首先是这些细胞相互粘附。如果你把它们放在一个培养基里,它们会聚在一起变成一个球。你甚至可以将它们完全解离,并在培养物中留下它们的集合,它们会粘在一起并以这种方式形成一个细胞球。
细胞的第二个相关特征是它们可以实现自组织,使得外部细胞具有称为纤毛的线状突起,能够保持和实现新功能。细胞在培养基中围成一圈旋转,并推动培养基周围的液体。随着时间的推移,邻近的细胞将会协调它们的纤毛,整个细胞球最终将同步旋转其纤毛,这就使整个细胞球开始移动。
二、从自愈到复制,多细胞性的奥秘
非洲青蛙的胚胎细胞会发育成皮肤。“它们在青蛙的皮肤外面,阻挡病原体侵入并重新分配粘液。”塔夫茨大学艾伦探索中心的生物学教授兼主任、这项研究的共同负责人迈克尔·莱文说,“但我们将它们置于一个新的环境中,让它们有机会重新利用多细胞性。”
他们想象的东西与青蛙的皮肤大不相同。“很长一段时间以来,人们一直认为我们已经找到了生命可以繁殖或复制的所有方式,但这是以前从未观察到的。”该论文的共同作者、塔夫斯大学高级科学家道格拉斯布莱克斯顿说。
莱文说:“这些细胞具有青蛙的基因组,由于重新配置了细胞结构,它们不会变成蝌蚪,而是利用它们的集体智慧,一种可塑性,去做一些令人震惊的事情。”
在早期的实验中,科学家们惊讶于Xenobots可以设计成完成简单的任务,例如自愈或可以存储记忆等。现在他们惊讶于一个计算机设计的细胞集合会自发地复制。活体机器人通过收集分离的细胞,然后将其压缩成自我复制品。
“我们拥有完整的、未改变的青蛙基因组。”莱文说,“但刚开始它并没有明确表现出这些细胞可以共同完成这项新任务的能力。”
“这些青蛙细胞的复制方式与青蛙的繁衍方式大不相同。科学上已知的任何动物或植物都不会以这种方式复制。”这项新研究的主要作者、完成博士学位的山姆·克里格曼说,他现在是塔夫特艾伦中心和哈佛大学Wyss生物启发工程研究所的博士后研究员。
▲细胞球复制的模型图(GIF截取自YouTube)
运动复制在分子水平上很常见,但以前从未在整个细胞或生物体的规模上观察到。
“我们发现生物体或生命系统是一个广阔的空间。”UVM工程与数学科学学院的教授邦加德说,“然后我们如何去探索那个空间?我们发现了会走路的活体机器人。我们发现了会游泳的活体机器人。现在,在这项研究中,我们发现了可以运动复制的活体机器人。还有什么?”
或者,正如科学家们在《美国国家科学院院刊》研究中所写的那样:“生命在表面之下隐藏着令人惊讶的行为,等待被发现。”
三、或用于疫苗研制,Xenobots成新教学平台
有些人可能会觉得这项研究很令人振奋。其他人可能会对自我复制生物技术的概念感到担忧,甚至恐惧。对于科学家团队来说,他们的研究目标是更深入的了解生物复制技术。
“我们正在努力了解这个特性:复制。世界和技术正在迅速变化。对于整个社会来说,我们研究和了解它是如何运作的很重要。”邦加德说。
“这些毫米大小的活体机器人完全放置在实验室中,很容易消失,并且还需要由联邦、州和机构伦理的专家进行审查,但这并不是让我彻夜难眠的原因。带来风险的是下一次新冠疫情的流行、环境污染加速对生态系统的破坏以及来自气候变化的威胁加剧。”
“这是研究自我复制系统的理想系统。我们有道德义务去了解人类可以控制它、引导它、消灭它、夸大它的条件。”
邦加德指出新冠疫情爆发时,制造、生产疫苗十分重要。“我们产生解决方案的速度非常重要。如果我们能够开发技术,向Xenobots学习,就可以快速告诉人工智能我们需要一种生物工具,可以做X和Y并抑制Z,这可能非常有益。这需要非常长的时间。”
该团队的目标是加快人们从发现问题到产生解决方案的速度,“比如部署活体机器人找到下水道中的微塑料垃圾或制造新药。”邦加德说。
“我们需要创造与我们面临的挑战保持同步增长的技术解决方案。”
该团队在研究中看到了再生医学进步的希望。“如果我们知道如何告诉细胞集合做我们想让它们做的事情,那最终就是再生医学——这就是创伤性损伤、先天缺陷、癌症和衰老的解决方案。”莱文说,“所有这些不同的问题都在这里,因为我们不知道如何预测和控制将要构建的细胞群。Xenobots是一个新的教学平台。”
四、还需人工干预,报道中并未提及
与此相反,Ars Technica的科学编辑约翰·蒂默(John Timmer)表示,一些报道已经远远超过了该研究的实际情况。
就其本身而言,细胞球太小,无法有效应用于其他任务中。但是研究人员可以把它们从这个培养基中拉出来,并将它们放在一个新的有大量额外细胞的培养基中。这些细胞球将通过整合其中一些额外的细胞来生长,并最终达到它们也可以移动的程度。
但这个过程存在明显的弊端,其效率低下,而且第二代细胞球比第一代小,追踪的圆圈也更小,最多可以出现两代细胞球的后代。
其次,该项研究着眼于通过改变原始细胞球的形状来优化这一点。研究人员结合人工智能模拟细胞球的行为,然后测试它们使用物理模拟器聚集细胞的能力。该算法基本上找到了最有效地细胞球复制形式,就是吃豆人形状的细胞球。
创建这些需要研究人员对细胞球进行“手术”,在细胞球被压扁成圆盘后在它的一侧切出一个缺口,然后将其展开。这并不是完全的自我复制,因为如果没有手术干预,随后的几代细胞球就不会变成吃豆人形状。

▲人工切割细胞球的过程(GIF截取自YouTube)
结语:人工智能出手,发现复制的最佳形态
该项目的研究团队认为Xenobots是一个新的教学平台,让他们在研究中看到了再生医学进步的希望。研究人员使用人工智能算法来确定活体机器人复制的最佳形态,“将一组奇怪的生物现象转化为相当于使用寿命有限的装配线机器人”,这个巧妙的方法也给其他研究人员提供了借鉴。
但在这篇论文中,蒂默表示,研究人员使用的语言夸大了该项研究结果。其次,该项研究目前还存在体量小、不能完全脱离人工干预等问题,蒂默认为,该论文在对科学的信任度上处于最低点,它带来的研究帮助可能是有限的。
来源:Tech Explore、Ars Technica
