








智东西(公众号:zhidxcom)
编译 | 铭滟
编辑 | 徐珊
智东西7月26日消息,据TechXplore报道,卡内基梅隆大学的研究人员从壁虎和海星中吸取灵感,研发新型黏附材料,并将此材料用于海星(GASS)爬行机器人的研发。GASS爬行机器人将首次用于水下环境,可静止停在51度斜坡上,并且该机器人可以吸附于任何物体表面。除此之外,新型黏附材料还可以收集物体表面的病原体、防范医院感染以及制作医疗设施传感器。
一、灵感源自壁虎,GASS爬行机器人能静止在51°斜坡上
壁虎可以在多种环境中攀爬,并且它的爪子不会留下粘性残留物。这曾成为许多爬墙机器人的灵感来源,而卡内基梅隆大学的研究人员首次将目光着眼于壁虎爪上的粘膜,开发粘性材料,让爬行机器人可以进行水下活动。
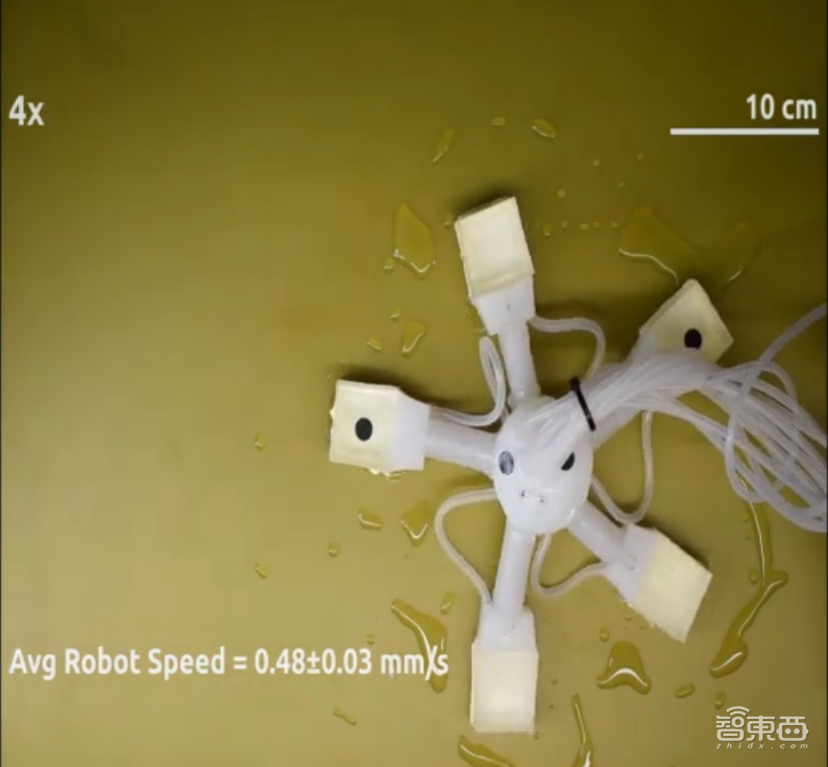
▲图为GASS爬行机器人在潮湿表面爬行,来源:YouTube
“水下活动是新材料的亮点。”机械工程实验室的Sampada Acharya说。“我们可以尝试将这一材料用于水下探索和日常医疗活动。”
一般情况下,研究人员制造粘性材料需要在无菌室中进行,程序较为复杂。该团队通过使用衍射光栅薄膜,以经济高效的方式简化了旧有流程。
为了测试这种材料的黏附性能,该团队开发了一种GASS爬行机器人,机器人的五只足上使用了新型黏附材料。
在评估GASS爬行机器人附着于玻璃、丙烯酸和不锈钢表面上的性能时,研究人员发现,在粘性支脚在潮湿和干燥条件下,机器人的运动能力都有了显著提升。机器人可以在25度的斜坡上爬升,并静止停留在51度的斜坡上。
二、新型黏附材料可用于防范医院感染和医疗传感器
该论文的主要作者Sampada Acharya和Peter Roberts的专研领域为医疗保健。尽管两位的目标方向不同,但他们都发现这种黏附材料有其实用价值。
Acharya的研究重点是收集感染环境中的病原体(例如细菌,病毒,真菌)。它的研究目的是通过黏附材料等方式,收集病原体,以减少患者在医院的获得性感染(住院病人在医院内获得的感染)。这些黏附材料将安装在自主机器人中使用。
“我希望看到厂商在未来的机器人中使用该黏附材料。该黏附材料可以收集和检测物体表面的病原体。这将减少医院感染病例,降低运营成本并使患者的生活更轻松。”Acharya解释道。“目前,我们研发的GASS爬行机器人能够在不同表面上移动。这意味着我们离投入生产的目标更近了一步。”
Roberts是机械工程实验室教授Carmel Majidi的博士候选人,一直致力于开发生物电势电极传感器(包括心电图ECG,肌电图EMG,脑电图EEG)的研究。为了使这些传感器在皮肤上有效发挥作用,尽管皮肤表面存在头发、汗水和其他污染物颗粒,它们仍需要粘附在皮肤上。
“这种新型黏附材料在皮肤上效果较好,”Roberts说。“该材料使用接触分裂效应,模拟天然壁虎的粘合作用,增强了材料的附着力。”
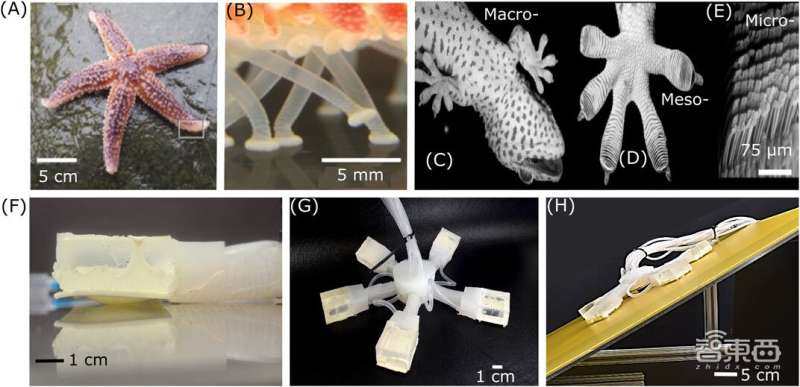
▲图为新型黏附材料的生物灵感来源和GASS爬行机器人应用示意,来源:Frontiers in Robotics and AI (2023). DOI: 10.3389/frobt.2023.1209202
未来,该团队希望进一步改进新型壁虎黏附材料和GASS爬行机器人,实现水下作业、陡坡爬行以及运动速度提升。
结语:新型黏附材料或将助力机器人研究
新型黏附材料不仅可用于攀爬辅助材料和收集病原体等领域,未来或将应用于更多的机器人领域。并且由于其可黏附且柔软的特性,与刚性材料相比,更适合应用于仿生机器人等领域。
在过去让机器人在各种表面上攀爬是一件较为困难的事,但随着该研究团队在壁虎中得到灵感,巧妙地解决了这一难题,让机器人不仅可以在各种表面攀爬,还可以在倾斜表面静止不动。如果这一技术未来应用于机器人开发中,或可推动新型机器人研究。
来源:TechXplore
