端到端自动驾驶目前逐渐被认为是实现完全自动驾驶的最优解,受到了学术界和产业界的广泛关注。然而,最近的研究表明,近年来涌现的不少端到端自动驾驶模型,在规划范式上存在一定问题。
近期,NVIDIA 研究团队提出了一种新型的端到端自动驾驶框架 Hydra-MDP。在 CVPR 2024 NAVSIM(大规模端到端驾驶)挑战赛中,Hydra-MDP 获得了第一名和创新奖,并且在 nuPlan 基准测试中的表现优于当前最先进的规划器。
Hydra-MDP 框架采用新颖的多教师、学生-教师知识蒸馏架构,整合了来自人类和基于规则的规划器的知识。借助基于规则的教师知识,Hydra-MDP 可以学习环境如何以端到端的方式影响规划,而不是求助于无差别的后处理,使其在不同驾驶环境和条件下的通用性有了显著提高。
在简要概述端到端自动驾驶后,李臻欣将介绍CVPR 2024 NAVSIM挑战赛的背景。接下来,他将对比分析端到端模型的规划范式,重点探讨如何运用Hydra-MDP这一新范式实现大规模端到端驾驶。最后会对可视化效果进行分析及总结。

公开课信息
主 题
《探索端到端自动驾驶规划新范式》
提 纲
1、端到端自动驾驶概述
2、CVPR 2024 大规模端到端驾驶挑战赛背景
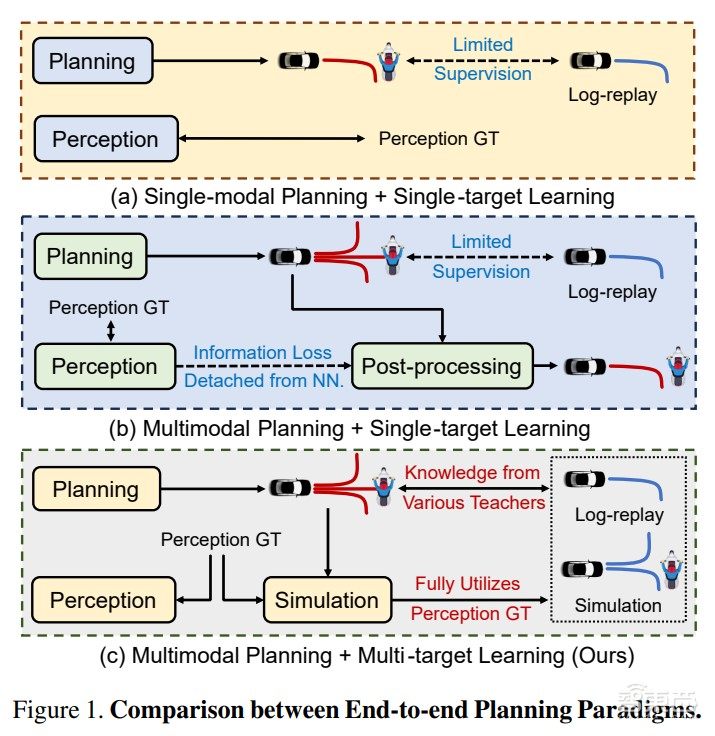
3、端到端模型的规划范式对比及问题
4、借助 Hydra-MDP 新范式实现大规模端到端驾驶
5、可视化分析及总结
主 讲 人
李臻欣,NVIDIA 自动驾驶团队深度学习和计算机视觉方向
复旦大学硕士生在读,师从吴祖煊教授与姜育刚教授。在 NVIDIA 的主要研究兴趣方向为3D 视觉与自动驾驶。提出过 BEVNext、Hydra-MDP 工作。Hydra-MDP 方法在2024年的 CVPR Navsim 挑战赛中获得第一名。
直 播 时 间
9月10日 19:00
报名方式
对此次公开课感兴趣的朋友,可以扫描下方二维码添加小助手小艾进行报名。已经添加小艾的老朋友,可以给小艾私信,发送“端到端”即可报名。我们会为报名成功的朋友推送直播链接。
同时,本次公开课也组建了交流群,直播开始前会邀请相关朋友入群交流。