在机器人操作领域,如何让机器人以更低成本、更高效率学习复杂的操作技能?高质量的数据是推动机器人学习进步的关键。传统的遥操作成本高且劳动强度大,而动捕技术等基于视觉的数据收集方法,缺乏表示机器人手臂与其环境之间复杂交互的能力。
斯坦福大学提出的通用操作接口(UMI),是一种数据收集和策略学习框架,允许将技能从人类演示直接转移到可部署的机器人策略,解决了人类示范数据收集中的挑战,并支持在各种场景中进行动作策略学习,但它仍然存在两个局限性:1)与特定机器人硬件的强耦合性;2)系统中使用开源SLAM2带来的复杂性。
为此,上海人工智能实验室联合中国电信人工智能研究院、西交利物浦大学等,提出与硬件解耦、可扩展且用户友好的具身技能学习数据采集系统Fast-UMI。其中,上海人工智能实验室青年研究员丁琰为项目负责人。
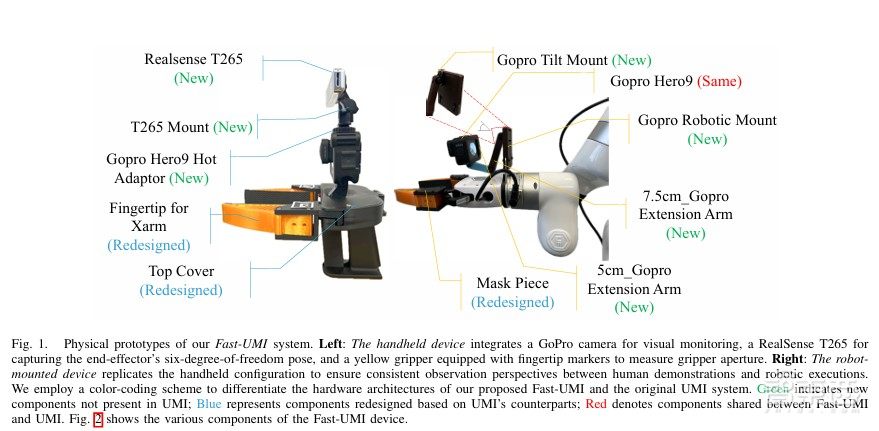
Fast-UMI是一种interface-mediated的操作系统,由两个关键组件组成:一个由人类操作的手持设备,用于收集数据;一个可安装在机器人上的机载设备,在策略推断期间使用。Fast-UMI采用解耦设计,兼容多种夹具,同时保持一致的观察视角,使得在手持设备上收集的数据训练的模型可以直接应用于真实机器人。通过使用现有的商业硬件产品直接获取末端执行器的位置,规避了复杂的SLAM部署和校准的需求,从而简化了数据处理流程。Fast-UMI还提供了支持软件工具,便于高效收集和转换机器人学习数据,是一种快速采集、即插即用、用户友好的工具。
此外,丁琰博士等研究人员基于20种日常任务,收集了超过10,000条高质量演示数据,总结出一套高效采集方法,解决了实际应用中的常见问题,并深入分析了如何提升数据的适用性与可靠性。
12月13日上午10点,智猩猩邀请到Fast-UMI的项目负责人、上海人工智能实验室青年研究员丁琰参与「智猩猩具身智能前沿讲座」第17讲,以《FastUMI:与硬件解耦且用户友好的具身技能学习数据采集系统》为主题带来直播讲解。
讲者
丁琰,上海人工智能实验室青年研究员
丁琰是上海人工智能实验室的青年研究员,2024年获得纽约州立大学宾汉姆顿分校计算机科学博士学位,拥有扎实的学术背景和丰富的真机操作经验。他的研究聚焦于移动操作机器人的规划与技能学习,致力于推动机器人高效改造现实世界。在机器人领域,丁博士已在ICRA、IROS、RAL、AURO等高水平会议和期刊发表多篇高水平论文,其中多篇一作作品引用量过百。此外,他主导开发了开源机器人项目BestMan和FastUMI,专注于推动机器人技术的实际落地与应用。个人主页:https://yding25.com/
第 17 讲
主 题
《FastUMI:与硬件解耦且用户友好的具身技能学习数据采集系统》
提 纲
1、现有的机器人数据采集系统介绍
2、通用操作界面UMI优点和局限性
3、利用Fast-UMI实现高效收集和转换机器人学习数据
4、基于20种日常任务的高质量数据采集经验总结
直 播 信 息
直播时间:12月13日上午10点
成果
论文成果1
标题:
《Fast-UMI: A Scalable and Hardware-Independent U niversal Manipulation Interface (Short Version)》
链接:
https://arxiv.org/pdf/2409.19499
项目地址:
https://fastumi.com/
论文成果2
标题:
《BestMan: A Modular Mobile Manipulator Platform for Embodied AI with Unified Simulation-Hardware APIs》
链接:
https://arxiv.org/abs/2410.13407
项目地址:
https://bestmanrobot.com/
如何报名
有讲座直播观看需求的朋友,可以添加小助手“莓莓”进行报名。已添加过“莓莓”的老朋友,可以给“莓莓”私信,发送“具身智能17”进行报名。对于通过报名的朋友,之后将邀请入群进行观看和交流。