







机器人前瞻(公众号:robot_pro)
作者 | 许丽思
编辑 | 漠影
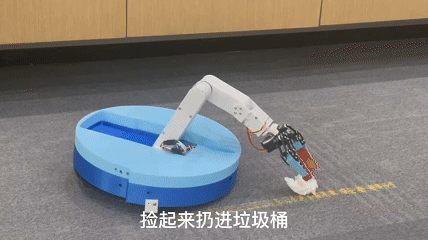
机器人前瞻1月15日报道,最近,商汤科技旗下家用机器人品牌元萝卜首次展示了“视觉+机械臂”技术在扫地机器人上的应用效果,通过视觉引导、机械臂执行,能够精准地拾取地上的纸团并扔进垃圾桶,还能深入柜底等狭窄空间收拾垃圾,在机器人卡住时利用机械臂辅助脱困。
为扫地机器人配上机械臂看似简单,但由于家庭中垃圾物品种类繁多、体积大小各异,对算法的通用泛化性、机械臂的体积控制、抓取操控精准度等要求也上升到了全新高度。
凭借在智能分区、智能避障、智能交互、机械臂抓取等领域的技术积累,元萝卜使得“视觉+机械臂”技术在扫地机器人上的应用既能做到感知层面的通用性、又能做到操作层面的精准性。
具体来说,在通用性方面,元萝卜利用商汤日日新大模型的多模态能力、常识与推理能力,增强机器人对通用目标识别的泛化能力,使其能够在复杂的环境中正确找到特定目标。同时,元萝卜还研发了专用视觉模型,提升针对特定目标物体的感知定位精度,为机械臂提供有效引导。
在精准性方面,元萝卜将已在下棋机器人领域得到成功验证的机械臂技术迁移到扫地机器人,实现了毫米级的抓取精度,无论是体积较大的垃圾,还是小巧精细的物件,都能够轻松应对。
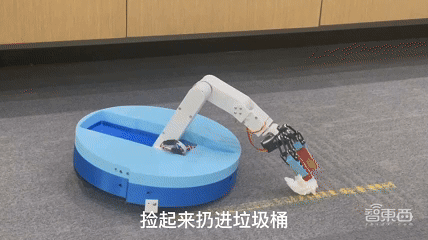
▲元萝卜带机械臂的扫地机器人原型机
除此之外,该机械臂具有5自由度,在模拟人类肩、肘、腕、手指灵活度的基础上,能够有效规避机械臂对底盘的碰撞风险,折叠后可以完全融入机器人底盘盘体,节省空间,并且夹爪力度适中,不会与人对抗,甚至还可以陪伴宠物进行玩耍。

据了解,此前,元萝卜通过在“视觉+机械臂”领域的技术深耕,对工业机械臂进行优化改造,缩小体积、提升精度,打造出了更加轻巧的轻量型机械臂,已在下棋领域成功落地,还成为全球第一家将量产机械臂引入家庭的品牌和“下棋机器人”品类的开创者。
