









机器人前瞻(公众号:robot_pro)
作者 | 许丽思
编辑 | 漠影
继在春晚舞台扭秧歌引起全网热议后,宇树的人形机器人这次又进军体育界了。
机器人前瞻2月5日报道,这两天,英伟达与CMU(卡耐基梅隆大学)研究团队共同发布了ASAP框架(Aligning Simulation and Real Physics,模拟与真实物理对齐)。这是一个real2sim2real模型,团队还把这个框架应用于宇树G1人形机器人,显著提升了机器人的灵活性与协调性,让机器人能够完成多种复杂的类人动作。
应用了ASAP框架的宇树G1机器人,可以学着科比一气呵成完成后仰、跳跃、投篮的系列动作,然后平稳着地。

它可以变身足球巨星C罗,完成标志性的庆祝动作“siu”等。


也会学着像詹姆斯一样,进行拉伸、胯下运球动作。

紧跟潮流的机器人,还跳上了APT舞。

另外,它还可以完成1.5米立定跳远、侧边跳跃、踢腿等众多高难度动作。


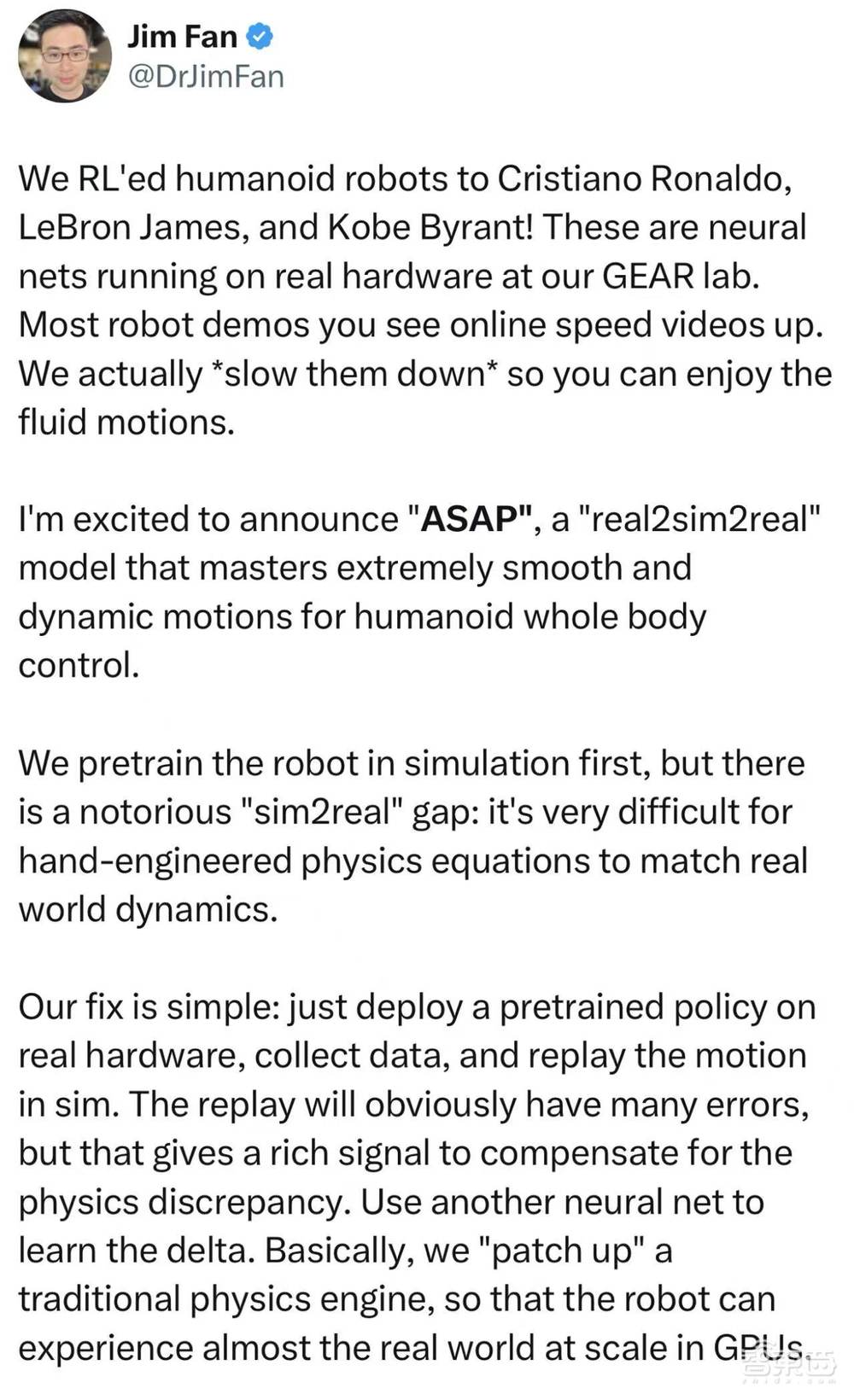
英伟达高级研究科学家Jim Fan兴奋谈道,相较于在网上看到的多数机器人演示视频都是经过加速处理的,团队特意放慢动作速度,让公众能清晰观赏每个流畅的动作细节。
Jim Fan还介绍,ASAP模型采用了“真实-仿真-真实”方法,具体来说,团队将预训练策略部署到实体机器人采集数据,随后在仿真环境回放动作记录。虽然回放过程必然产生偏差,但这些误差恰恰成为修正物理差异的关键数据源。通过额外神经网络学习差异参数,本质上是对传统物理引擎进行“动态校准”,使机器人能依托GPU的并行计算能力,在仿真环境中获得近乎真实的大规模训练体验。
Jim Fan还畅想,2030年的人形机器人奥运会必然是一场盛事。
不少网友也在评论区热议,期待在将来能够看到机器人拳击打大赛、机器人篮球联赛。

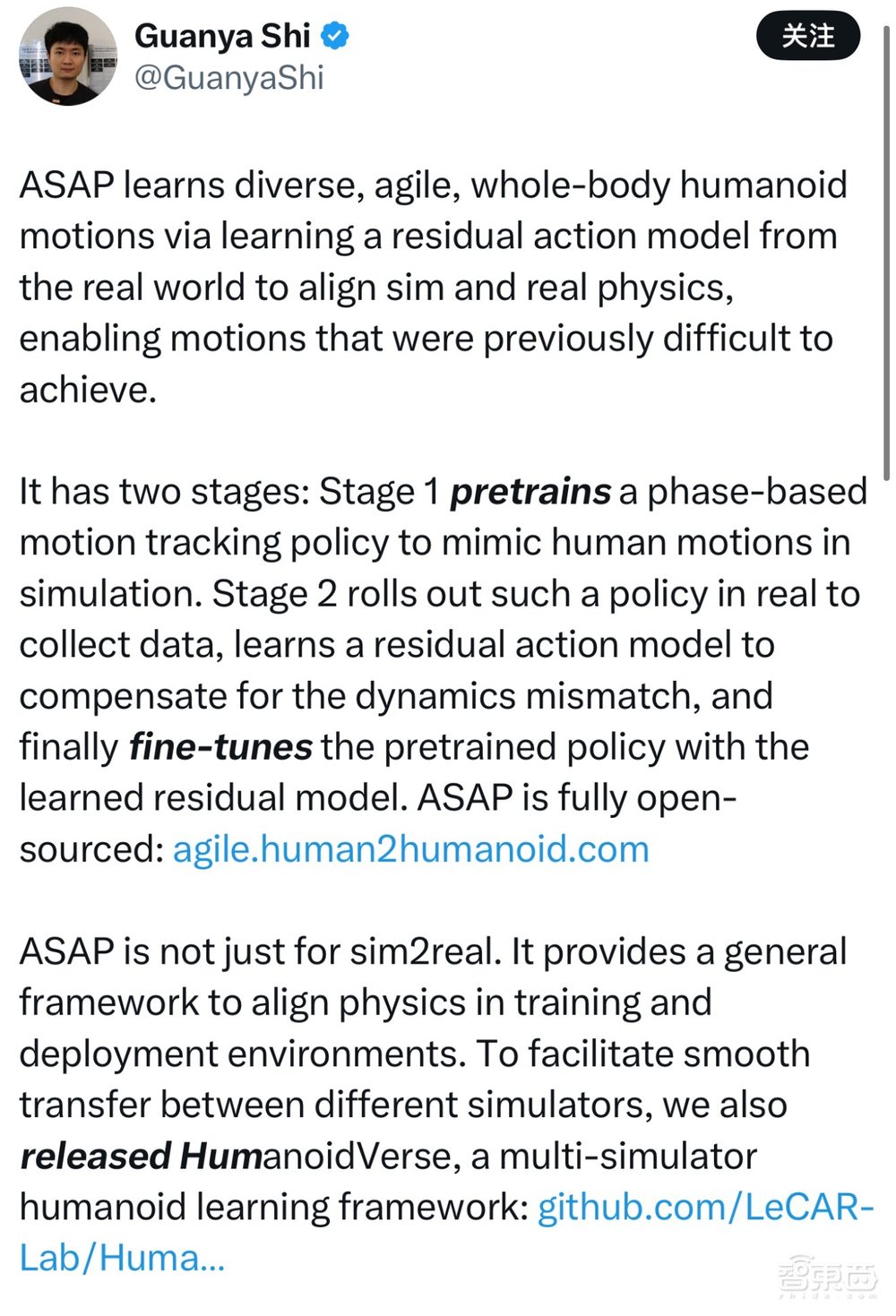
CMU助理教授、论文共同作者Guanya Shi介绍,ASAP框架分为两个阶段,第一阶段预训练一个基于相位的动作跟踪策略,以在仿真中模仿人类动作。第二阶段在现实世界中执行该策略以收集数据,学习一个残差动作模型来补偿动力学不匹配,最后用学习到的残差模型对预训练策略进行微调。
他解释,ASAP不仅适用于仿真到现实的迁移,它还提供了一个通用框架来对齐训练和部署环境中的物理特性。
为了促进不同仿真器之间的平滑迁移,团队还发布了HumanoidVerse,这是一个多仿真器人形机器人学习框架,能将仿真器、任务和算法分离并模块化,使得在不同仿真器和任务之间切换时只需最小的工作量。
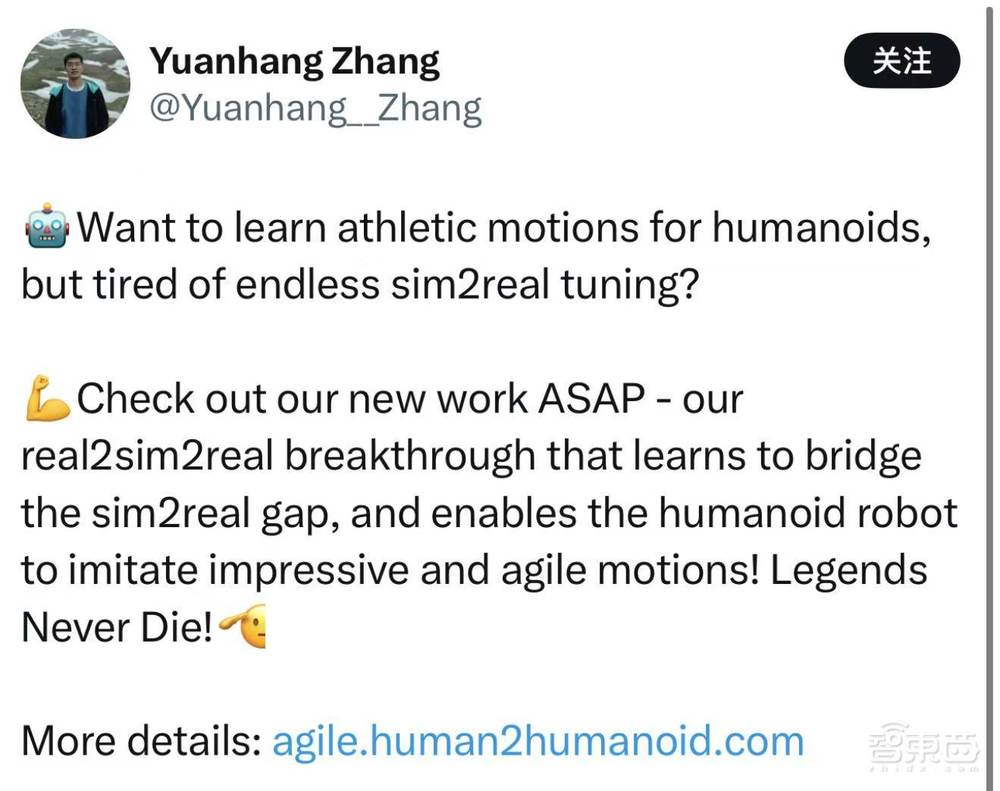
论文共同一作、CMU机器人研究所(CMU RI)的硕士生张远航提到,real2sim2real无需像sim2real一样进行无休止的动作调整,能够弥补sim2real的差距,从而让机器人能够模仿许多类人的敏捷动作。
ASAP框架有以下四个具体步骤:
1、运动跟踪预训练与真实轨迹收集:先从真人视频中提取动作并重定向到机器人上,预训练多个运动跟踪策略,生成真实世界的运动轨迹。
2、Delta动作模型训练:基于真实世界轨迹数据,训练Delta动作模型,缩小仿真状态与真实世界状态之间的差异。
3、策略微调:Delta动作模型训练完成后,将其集成到仿真器中,使仿真器能匹配真实世界的物理特性,随后对之前预训练的运动跟踪策略进行微调。
4、真实世界部署:在真实环境中部署微调后的策略,此时不再需要Delta动作模型了 。
ASAP框架的提出,为缩小sim2real之间差距提供了全新思路,也有效解决了动力学不匹配问题,让机器人做出高度类人的敏捷的动作,并显著降低运动跟踪误差,另外,ASAP是完全开源的,有望加速相关技术的研究与应用。
论文地址如下:
https://agile.human2humanoid.com/
