







机器人前瞻(公众号:robot_pro)
作者 | 许丽思
编辑 | 漠影
长期以来,由美国麻省理工学院(MIT)主导的视触觉技术垄断格局,终于被一个中国团队自研的全新技术路线突破了。
2009年,MIT的Edward Adelson教授以三色光原理为基础,提出了GelSight视触觉感知技术。MIT牢牢掌握这项技术,把视触觉传感器推到了机器人触觉感知领域的最前沿,成为全球顶尖高校和科研机构的技术标杆。
故事始于同门师兄弟在技术路线上的一次分化。当MIT的Alberto Rodriguez教授延续三色光技术,带着改良版GelSlim传感器登场时,他的同门师兄、香港科技大学创始院长王煜却决定采用单色光图案追踪技术,攻克视触觉感知难关。
王煜是戴盟机器人的创始人、首席科学家,在上个世纪80年代前往美国卡内基梅隆大学(CMU)攻读博士学位,后来与李泽湘共同创办香港科技大学机器人研究院,担任该院创始院长。
王煜和Alberto Rodriguez都曾师从CMU时任机器人研究所所长、机器人操作领域先驱Matthew Mason,王煜还是Matthew招收的第一个博士生。
为什么从2017年开始,王煜就坚定要走这条全新的视触觉技术路线?他不仅是看到了GelSight技术背后的待改进之处,更是察觉到沿用这一技术可能带来的风险——科技巨头Meta 曾因技术路线雷同而引发纠纷。
深耕视触觉技术8年,戴盟机器人在不久前终于推出全球首款多维高分辨率高频率视触觉传感器,突破了MIT的技术壁垒,成为了国内首家独立自主研发视触觉传感器并量产的具身智能企业。
从MIT开创Gelsight技术到戴盟机器人的颠覆性升级,这场横跨十余年的触觉感知创新接力,正重新定义机器人的感知与操作边界。
一、视触觉从三色光进化到单色光,中国团队开辟技术新路径
当机器人拥有触觉感知能力时,它能通过感知物体的形状、纹理、力反馈等信息,更好地理解周围环境并精准执行操作任务。
但是,大多数机器人触觉感知传感器仍存在技术精度与分辨率不足、多维信号感知能力弱、复杂多变环境下耐用性和可靠性较差等问题,并且成本较高限制了大规模应用。除此之外,当机器人触摸物体时,触觉传感器会同时获取到关于物体表面形状、硬度、温度等多维度的信息,这些数据的处理需要强大的计算能力和复杂的算法,否则会导致响应延迟或不准确。
而不少学界与业界观点指出,视触觉传感器将接触力、纹理等触觉信息转化为视觉信号并解析为多维数据,突破了传统触觉传感器在精度、模态等方面的瓶颈,在机器人领域应用潜力巨大。又因结构精简耐用,降低线路复杂度与成本,且不易受环境因素及磁场干扰。
视触觉技术的萌芽,可以追溯到2004年。当时,日本东京大学的研究人员首次尝试通过分析CCD相机捕捉到的图像变化,来重建接触表面的力学分布。
直到2009年,MIT的Edward Adelson教授提出将光度立体法(Photometric Stereo)应用于触觉传感领域,视触觉技术才真正迎来转折点。
Adelson所提出的创新想法颇具巧思,并将其命名为Gelsight:Gel(凝胶)是传感器弹性接触表面使用的材料;Sight(视觉),传感机制是使用摄像头采集视觉图像。传感器在接触物体时,会用红、绿、蓝三色光照射物体表面,内置的摄像头在LED灯光的辅助下捕捉接触物体的凝胶产生的形变,并通过计算机视觉的算法将凝胶形变信息与触觉信息进行映射。
▲Edward Adelson
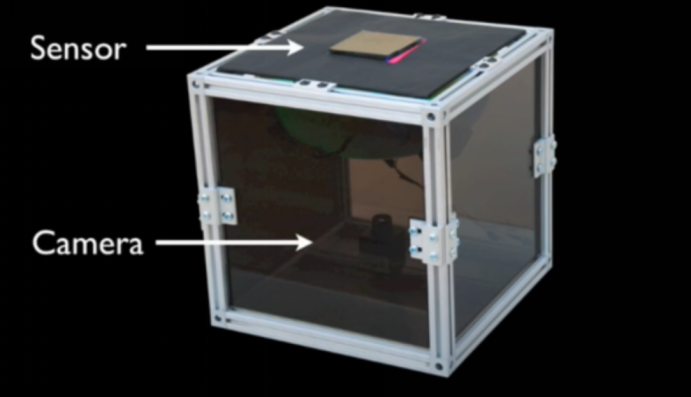
Gelsight的最初形态是一个边长为50厘米的正方体盒子,当时Adelson只是将这项技术用于物体表面的微观结构观测,诸如纹理、凹陷、凸起等,没有应用到机器人触觉感知中。
Adelson团队基于此申请了多项专利,还创办了Gelsight公司,将实验室技术推向产业化。MIT牢牢掌握Gelsight的核心技术专利,但也有其他视触觉企业尝试应用三色光技术,这就为后来的知识产权纷争埋下了隐患——企业要么面临高昂的专利成本,要么极易引发知识产权侵权风险。
Meta就曾踩过这个“雷区”。2020年,Meta推出基于三色光原理的触觉传感器Digit,试图将其应用于VR物理接口、机器人领域,并探索商业化。后来,双方因为技术路线雷同而引发了一系列专利纠纷,最后Digit的销售权被移交Gelsight。
在国内,部分具备国际学术背景的团队,也借鉴Gelsight的三色光技术开展视触觉产品研发,但在技术转化与商业化过程中,需充分重视知识产权合规性。
在Gelsight的光环下,MIT内部的技术迭代从未停止。2014年,Alberto Rodriguez到MIT任职助理教授,专攻机器人操作,对Gelsight传感器进行了改良。
▲Alberto Rodriguez
作为同门师兄弟,王煜和Rodriguez的关系十分紧密。2017年,香港科技大学机器人研究院与MIT启动了一项长达七年的合作项目,由王煜与Rodriguez分别带队,这场合作可以视为视触觉技术路线分化的关键节点。
▲王煜
Rodriguez团队延续了MIT的三色光技术,仅在Gelsight的基础上进行微调,将原先传感器内部结构进行调整,并减薄厚度,推出Gelslim,可以应用于机器人操作任务。
而王煜团队则选择了一条截然不同的道路:放弃三色光,采用单色光图案追踪原理,通过计算机视觉追踪特征点,结合几何标定,将二维形变场重建为三维稠密形变场。
▲王煜团队与Alberto团队合作项目一期
王煜团队的创新成果,不仅打破了MIT的技术壁垒、实现了视触觉传感器自主知识产权的突破,更具备小型化、算力要求低等优势。最终,其孵化出中国唯一一家具有独立自主知识产权视触觉传感器的企业——戴盟机器人。
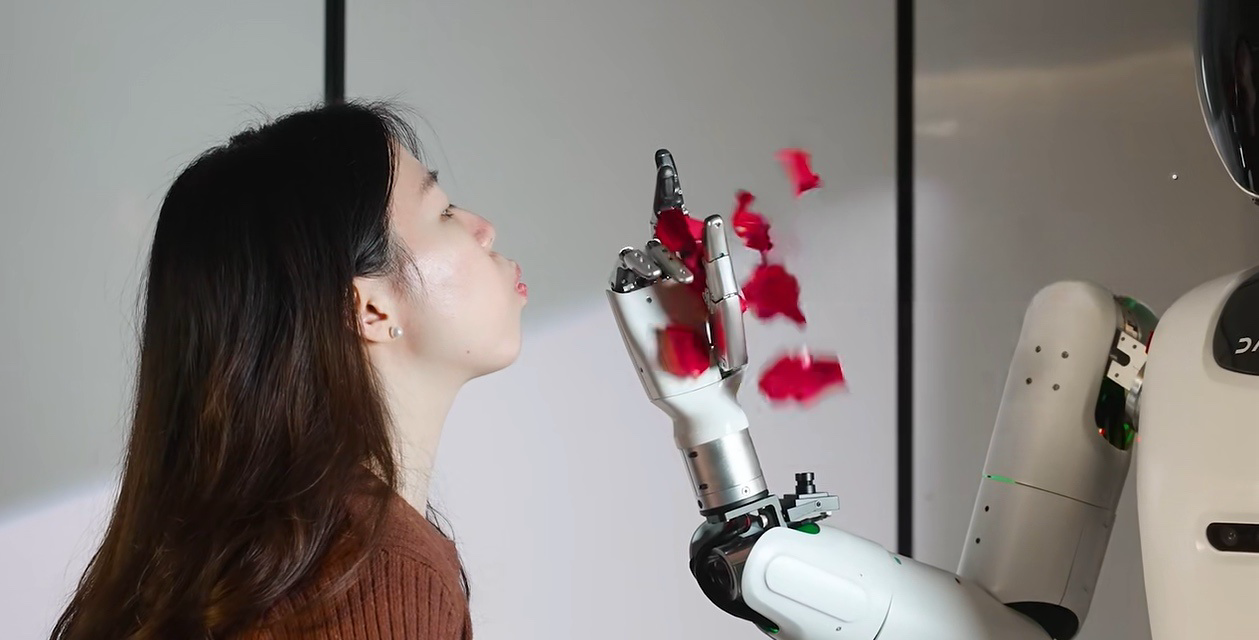
二、打造远超人手的触觉感知能力,精准感受风吹花瓣的细微颤动
基于港科大科研团队多年的技术沉淀,戴盟在不久前发布了全球首款多维高分辨率高频率视触觉传感器——DM-Tac W。
区别于GelSight的触觉感知技术方案采用的是红、绿、蓝三色光原理,DM-Tac W采用的是基于单色光原理的高分辨率视触觉感知技术路线。
具体来说,传感器内部集成了摄像头,当物体接触传感器表面时,摄像头能实时捕捉密闭光场中的形变特征,并结合原创解析算法解算光场变化,从而实现正压力和切向力的超高分辨率,同时稳定输出频率达120Hz的触觉信号。
目前,GelSight视触觉传感器虽经过多次迭代改进,但由于工艺和机构复杂,小型化依旧是一大挑战,官网上在售的GelSight Mini仍明显大于真人手指。
此外,GelSight依赖复杂的视觉算法,需要较大的计算资源,因此在对实时性要求高的场景中可能会出现响应延迟,同时还会导致传感器发热量过大、输出的触觉信号频率降低等问题。
相比之下,戴盟的单色光方案降低了对信息传输带宽的需求,对算力要求降低、减少散热,使用起来更稳定,成本更低。DM-Tac W每平方厘米覆盖4万个感知单元,远超人手每平方厘米240个感知单元,是当前最密集的阵列式触觉传感器的数百倍。
基于超高密度的感知阵列,该产品可捕捉物体接触时的形貌、纹理、软硬、滑移、按压力、切向力等多种模态信息,为夹爪等执行末端赋予类人触觉能力,助力其在复杂场景下的精准操控与自适应交互。
比如,DM-Tac W能让夹爪轻松夹取鸡蛋壳这样的易碎物品,也能感受羽毛、毛刷轻轻拂过的触感。
能轻松夹取鸡蛋壳这样的易碎物品,也能感受羽毛、毛刷轻轻拂过的触感。


夹爪握住一次性塑料杯时,会随着倒进杯子中的水的容量变化,实时调整抓握力度;灵巧手也能追踪气球的膨胀缩小,调整手指的姿态。

甚至还能准确识别出黄瓜、草莓、葡萄等不同物体的软硬程度。

戴盟还发布了五指灵巧手DM-Hand1,该产品搭载了全球首款毫米级厚度的视触觉传感器。在保证高分辨率的基础上,戴盟突破性地将传感器厚度从厘米级缩小至毫米级,可轻松将其部署在人类指尖大小的空间,极大地降低了灵巧手的手指厚度,提高了机器人的灵活性和适应性,能够让机器人完成自适应抓握力控制、易碎易损件柔顺操控、精密零部件装配等高难度任务。
DM-Hand1可以感受到风吹花瓣的细微颤动,还能追踪气球的膨胀缩小,从而调整手指的姿态。


目前,戴盟的产品已在具身智能、工业、智慧物流、智能制造、实验室自动化等场景实现小规模应用。
结语:视触觉技术破解精细操作难题,加速具身智能商业化落地
具身智能机器人热度越来越高,据高盛分析,到2035年人形机器人的潜在市场总额预计将达到380亿美元(约合人民币2770亿元),比之前预测的60亿美元(约合人民币432亿元)增长了6倍多。同期,机器人的出货量将增加4倍,达到140万台。
除了关注机器人的炫酷技能之外,市场越来越聚焦于机器人到底能做什么、能应用到哪些实际场景中。从年初开始,企业让机器人进车厂、家电制造厂、展会等的步伐不断加快。多位从业者表示,要让人形机器人走出泡沫、真正应用于实际场景中,相较于运动控制能力,精细操作能力是更为关键的一环。
而触觉传感器作为机器人实现精细操作的核心零部件,其重要性不言而喻。同时,触觉还能有效解决具身智能行业存在的数据焦虑问题。戴盟机器人创始人兼CEO段江哗曾提到,在模型训练中引入触觉信息,不仅能大幅减少数据用量、提升数据质量,还能显著提高机器人执行任务的成功率,不少学界研究成果也已经证明了这一观点。
比如,某操作任务如果采用纯视觉数据训练的方式,需约5万条数据才能达到80%成功率,而加入双指触觉信息后,仅需100条数据即可实现相近效果,数据量仅为前者的1/500。
以戴盟为代表的国内企业,正积极探索触觉技术的多样化创新路径,推动着触觉感知技术从“依赖舶来”到“自主定义”的转变,更在全球科技博弈中竖起一面旗帜。在这些技术进一步成熟后,具身智能的发展有望得到显著提速。
