








机器人前瞻(公众号:robot_pro)
作者 | 许丽思
编辑 | 漠影
机器人前瞻6月13日报道,近日,无锡机器人关节企业Motorevo宣布完成数千万元Pre-A轮融资,由上市公司蓝黛科技、锡创投(金投致源)、无锡新投联合投资,源合资本担任长期独家财务顾问,本轮融资将用于公司产线扩充和营运资本补充,推动其一体化关节模组迈向规模化商用。
Motorevo于2023年在无锡成立,创始团队由一群来自吉林大学、华中科技大学、香港科技大学、中南大学的90后组成,背靠吉林大学工程仿生教育部实验室智力资源,聚焦于机器人关节模组、电机、减速器的研发和生产。
当前,新一代机器人的快速发展,强调轻量化、高集成度、高自由度等,这也对硬件提出了更高的要求。关节模组是机器人基本动力单元,也是最重要的组成部分。在人形机器人身上,关节模组占据了过半成本。
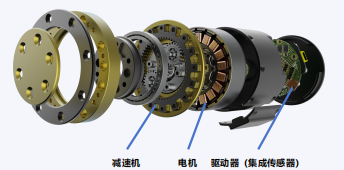
Motorevo定位为“新一代机器人一体化关节通用平台”,将减速机、电机、传感器、驱动器进行一体化集成,打造满足新一代机器人场景需求的解决方案,已应用于乐聚机器人、腾讯RoboticsX、北京大学、浙江大学、MIT等多家企业、高校与研究机构的产品中。
一、吉大、华科大、厦大校友联手,攻克传统关节痛点
Motorevo创始人兼CEO陈万楷的创业轨迹始于实验室与产业需求的碰撞。
他是华中科技大学学士、墨尔本大学硕士、吉林大学博士,曾在中国电子科技集团海洋信息技术研究院和浙江省北大信息技术高等研究院从事机器人研发工作,涉及水下机器人、四足机器人、人形机器、服务机器人等种类,负责机器人的伺服关节、机身、腿部传动结构等部分设计,积累了大量机器人结构设计经验。

▲Motorevo创始人兼CEO陈万楷
在机器人研发过程中,他发现,市面上缺少成熟、好用的关节,传统关节存在重量大、集成度低、走线复杂、性能不足等问题,而新一代机器人对轻量化、高扭矩密度和可靠性的需求激增,这拥有巨大的市场空间。
过去的研究经历也为后续创业的技术储备买下伏笔。比如,陈万楷设计的多款水下机器人曾获国资委办公厅颁布的奖项、德国IF产品奖等,这些经验直接转化为产品优势:Motorevo关节具备IP68级防水能力,可适应复杂环境,而水下场景对电机效率、控制精度的严苛要求,也为后续力控算法的突破奠定了基础。
目前,Motorevo团队规模保持在30人左右,其中研发人员占比超50%,核心成员均来自华中科技大学、吉林大学、厦门大学等高校,以及国内电机龙头企业等。
团队形成了“学术带头人+产业实战派”的组合——首席科学家刘春宝教授,为吉林大学“唐敖庆学者”领军教授、博士生导师,多年从事于复杂机电系统与智能化方向研究;硬件负责人刘彦禹、算法负责人郑淳馨等则分别在电机设计、控制算法领域拥有深厚积累。
二、打造一体化关节通用平台,成为关节领域的“宁德时代”
在陈万楷看来,当前机器人关节行业存在三大顽疾:其一,标准体系空白,导致参数虚标乱象频发,一些厂商标称的扭矩、寿命数据与实际表现相差甚远;其二,从实验室到商用的过程中,关节的可靠性、稳定性与一致性不足;其三,能量密度与成本矛盾突出,客户希望关节的能量密度和扭矩密度能够更高,但随之而来的就是居高不下的成本。
所以,他希望将Motorevo打造成新一代机器人一体化关节通用平台。就像宁德时代之于汽车行业,其定义了电池的标准一样,Motorevo想要建立关节领域的通用标准。
传统的关节方案难以满足当下新范式机器人的需求,而Motorevo所打造的一体化关节将减速机、电机、传感器、驱动器一体化集成,不仅优化了结构设计、减少整体重量,还提升能力密度、极大提高空间利用率,是满足新范式机器人场景需求的最优解决方案。
研发过程充满挑战,早期为实现轻量化,团队曾尝试将减速器体积压缩至极限,但随之而来的是可靠性和稳定性受到影响,产品寿命骤减。在驱动器方面,机器人大都基于力控进行控制,对关节力控精度的要求非常高,需要具备灵敏的对力的感知能力,团队也花费了大量时间进行技术攻关。
目前,通过研发PA系列行星伺服关节、HA系列谐波伺服关节、CA系列摆线伺服关节等产品,Motorevo构建了覆盖2Nm至400Nm扭矩范围的标准化产品矩阵。
其中,PA系列产品峰值扭矩密度达210Nm/kg,超越国内某头部机器人公司关节的189Nm/kg。相较于市面上同类产品,Motorevo的产品做到了质量更轻,扭矩更高,响应更快,价格更低。
Motorevo已实现从技术到商业的闭环,客户可直接从产品库中选型,而非依赖定制开发,为众多场景提供通用的标准化方案,降低机器人厂商的硬件门槛。业内多家头部人形机器人、四足机器人厂商,以及北京大学、清华大学等高校科研机构,都采用了Motorevo的关节产品。截止目前,Motorevo在手订单已经超6000万,全年预计超1亿元。
陈万楷透露,后续,Motorevo将朝着三个技术方向进行突破:在减速器上,聚焦良率提升与传递效率优化;在电机上,探索将轴向磁通、扁线绕组等汽车领域技术迁移至机器人关节领域,进一步提升扭矩密度;驱动器方面,通过精简设计与算法优化,将进一步压缩体积并提升力控精度,响应更快。
结语:加速机器人从专用工具向通用智能终端进化
当前,全球机器人产业正处于爆发前夜,关节模组的技术跃迁不仅是零部件的升级,更是机器人从专用工具进化为通用智能终端的核心驱动力。
随着Motorevo等企业通过产学研协同突破技术壁垒,以及行业标准的逐步建立,一个以高性能关节为基础、覆盖千行百业的机器人生态正在成型。可以预见,关节模组研发的每一次加速,都将推动机器人更轻盈、更智能地走进真实世界,成为重构人类生产生活方式的核心力量。
