








机器人前瞻(公众号:robot_pro)
作者 | 程茜
编辑 | 漠影
机器人前瞻11月24日报道,近日,国内规模最大的全尺寸人形机器人数据集LET数据集正式发布,开源首批6w+分钟真机数据,其还为开发者提供了一套数据转换、模型训练、仿真测试与真机部署的全流程数据工具链。

▲机器人真机实采与仿真数据
目前,其60000多分钟数据已被捐献至开放原子开源基金会,在Openloong开源社区官网上线。
数据采集是人形机器人从实验室走向规模化应用的核心前提,其数据质量与有效性直接决定了机器人具身智能的智能化水平上限。但目前这一领域仍面临诸多现实瓶颈,如数据采集难度高、数据价值挖掘不充分、行业标准化缺失等问题尤为突出。
此次LET数据集的开源,不仅为行业提供了高质量数据解决方案,更构建了全流程技术支撑体系,加速人形机器人技术落地进程。
一、统一真机实采,可应对复杂多场景需求
数据获取难度大、标注流程复杂等问题已成为人形机器人研发的核心瓶颈,再加上可用的高质量数据稀缺,也直接制约了其模型训练效果与跨场景泛化能力的提升。
业界主流的数据采集方式涵盖仿真生成、数据合成与真机实采等,其中真机实采因能获取真实场景下的高保真多模态数据,是突破仿真和现实之间“域差”、确保模型训练质量与泛化能力的最有效方式。
真机实采的优势在于,其数据直接源自真实环境中的物理交互,能精准还原力觉反馈、环境干扰等仿真数据难以模拟的细节,还能同步采集视觉、视觉、运动、语音等多维度数据。如下面LET数据集中的物流场景,机器人可还原拿取、扫描、放置快递全流程。

▲机器人真机实采与仿真数据
LET数据集正是当下国内开源领域规模最大全尺寸人形机器人数据集,其完全基于真机实采。
LET数据集是基于乐聚夸父系列全尺寸人形机器人进行统一采集。这一人形机器人具备40多个自由度,身高约1.66米、体重约55公斤,同时搭配头部立体相机与腕部RGB-D相机,可有效避免因机器人形态差异导致的数据偏差问题。
一方面,这一人形机器人的形态参数贴合实际应用需求,另一方面,相机的协同感知能提升数据采集精度。如下面对日用品的摆放,其可以通过头部和腕部相机协同,将物品放置到正确位置。

除了技术层面,人形机器人产业发展仍面临一大核心短板,那就是相关国家标准的缺位,技术路线碎片化、资源浪费等都会为未来人形机器人规模化量产造成风险。
因此,LET数据集从一开始就做到了标准化。
该数据集以国家地方共建人形机器人创新中心规范为基准,从源头确保数据的高质量、专业合规性与可用性,通过统一流程与标准化处理,破解数据多源异构、数据格式不一、质量参差不齐等痛点,实现规模化、高质量的数据生产。
据了解,乐聚机器人与国家地方共建人形机器人创新中心还在联合开展国家及行业标准研制,推动国家级标准化试点标准验证与实施应用,从根源上破解数据采集标准化难题。
综上可以看出,以真机采集为核心数据来源,并且建立在统一基准之上的LET数据集,或成为推动具身智能高质量训练与规模化落地的关键之一。
二、多模态数据+六大真实作业场景,精准匹配数据需求痛点
结合当前人形机器人从实验室走向多场景落地、行业亟需真实场景高质量数据破解域差与泛化难题的背景,当我们聚焦于其数据本身会发现,LET数据集正以多模态数据深度融合与六大贴合工业、服务等实际需求的真实作业场景为支撑,精准匹配行业数据需求痛点。
首先在多模态数据方面,人形机器人往往需要模拟人类的感知、决策、执行的类人化交互逻辑,而单一模态数据无法覆盖真实场景中复杂的环境认知与物理交互需求,因此需要多模态数据的协同。
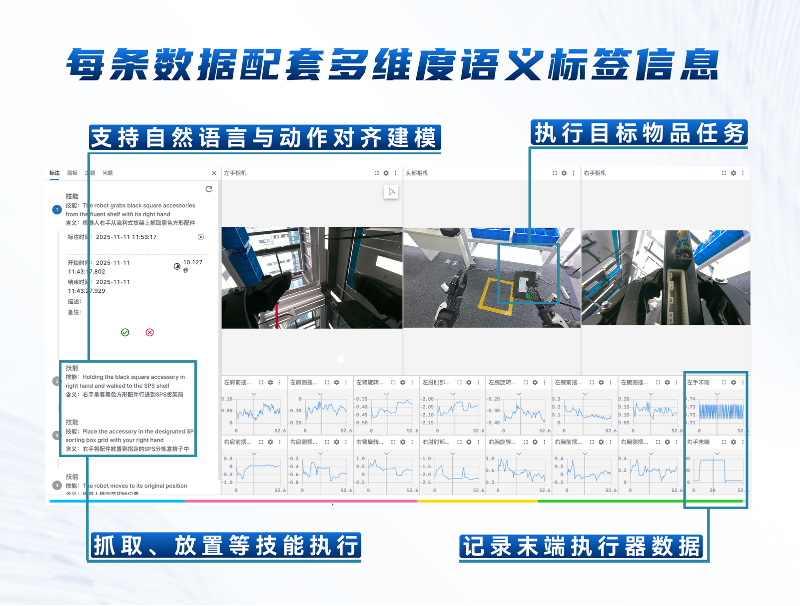
LET数据集融合了机器人头部和双腕视角的清晰、稳定视频流,并同步采集RGB图像、深度图、关节状态及末端执行器状态等关键模态信息,全方位捕捉人形机器人的操作细节,使得最后的数据有较高完整度。
为了进一步提高数据质量,该数据集还采用了一套系统的多模态对齐标注体系,通过任务标注细化与多维度语义标签,使得机器人能更精准地学习类人化交互逻辑。
其次在真实场景方面,人形机器人最终需要在多样化真实环境中实现实用化落地,因此需要不同场景的真实作业数据,以让机器人模型学习适配不同环境特征、任务逻辑与突发情况。
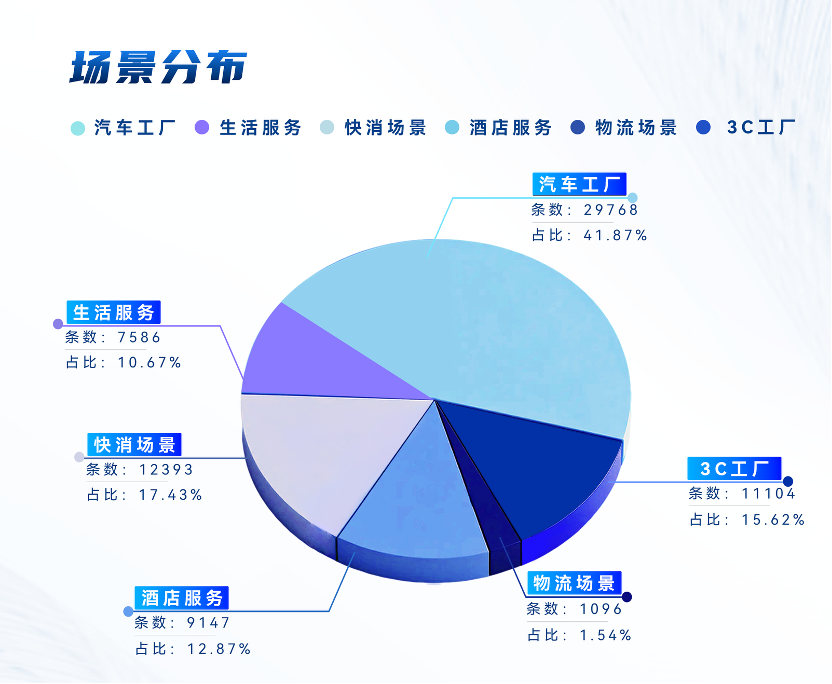
LET数据集涵盖了工业、商业零售及日常生活3大领域中,汽车工厂、快消场景、3C工厂、酒店服务、生活服务及物流场景6大场景,以及涵盖抓取放置、工具使用、搬运、协作等典型任务,覆盖移动平台、机械臂单臂抓取,多臂协作等多种操作形态的31项任务、117种原子技能。
如在日化生产场景,其数据案例就包括日化产品的定姿摆放:

在汽车制造场景,应用案例会涉及SPS零件分拣:

在物流场景,LET数据集会包含快递分拣的应用:

在3C场景,其有传送带物料分拣应用:

该数据集目前汽车工厂的占比较大,这也契合当下人形机器人率先在汽车工厂落地的行业趋势。
可以看出,这一数据集的场景基本覆盖了当下人形机器人的应用场景,且围绕率先规模化落地的具体场景完成定向优化。其既能够为机器人算法提供多样化真实场景的实战数据支撑,还可以提升泛化能力,为机器人之后学习复杂技能铺路。
多模态数据融合与多场景真实作业,这样的双重优势叠加,既可以解决高质量数据稀缺的行业痛点,又通过精准感知、场景适配的组合,降低企业研发阶段的样本采集与模型调优成本。
三、以硬件、算法、流程组合方案,突破数据采集瓶颈
要实现这样的全栈式数据集构建,首要攻克的便是数据实采环节的技术壁垒。对于人形机器人数据实采而言,真实环境的不可预测性与硬件部署、流程衔接的协同复杂性,是绕不开的核心挑战。
在此基础上,LET数据集通过数采链路实现了三大技术创新。
一是构建视觉伺服闭环数据。一般而言机器人本体与传感器存在固有制造误差、校准偏差,且不同设备的硬件参数存在异构性,其将有误差的机器人本体和传感器,转变为依赖一个统一的、抽象的坐标系或特征,可有效解决多设备数据一致性难题,使数据质量一致性达到90%以上。
如下面复杂场景中,机器人可以准确拿取物品,并通过转身、走路等运动将其放置到固定位置。

二是采用高效的组帧技术。传感器数据传输、处理过程中的延迟会导致多源数据时序脱节,使得模型无法学习到精准的动作时序控制规律。其将多传感器数据帧的时间戳误差与延迟严格控制在10ms以内,显著提升数据层时序同步的准确性。
三是建立自动化Benchmark评测体系。数据集缺乏对数据收敛度的系统性评估时,采集数据与目标应用场景的适配性可能无法量化,因此其对数据收敛度、样本效率与稳定性进行全面评估,可确保数据迁移的有效性和泛化能力。
这种通过硬件校准、算法优化、流程标准化的组合方案正是其系统性提升数据质量、对齐精度与模型可验证性的关键。
结语:为人形机器人研发注入数据动力
人形机器人实采需要面对高成本、低效率、规模化与数据质量难以兼顾的现实制约,而其核心意义在于能够突破仿真数据与现实世界的域差瓶颈,获取高保真、强适配的真实场景多模态数据,为机器人具身智能模型提供贴近实际应用的训练样本。
此次由乐聚机器人主导开源的国内规模最大真机实采数据集,可以进一步提升机器人动作精度、环境适应能力与跨场景泛化能力,最终破解行业落地适配难题,加速人形机器人从实验室研发走向规模化商业应用的进程。
