








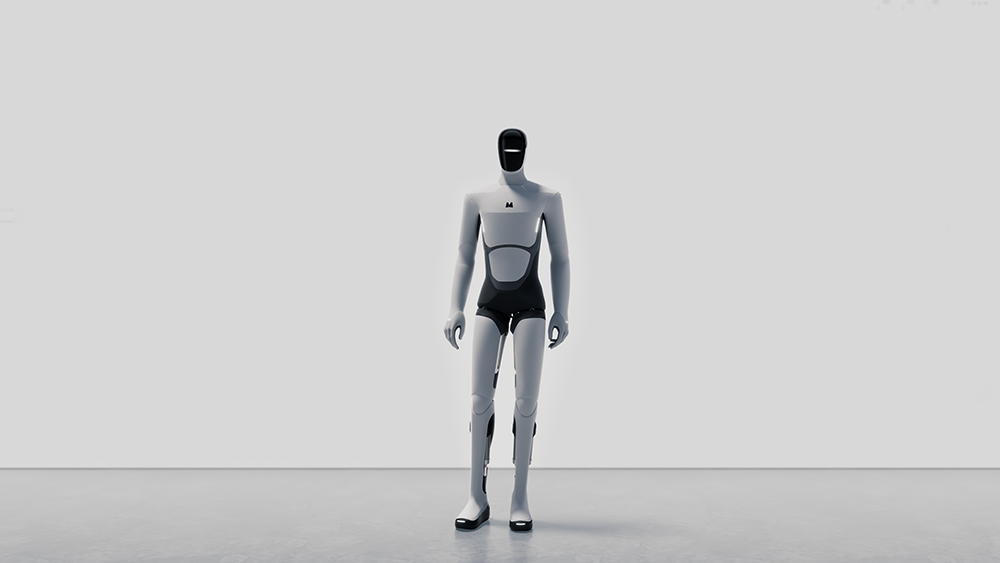
机器人前瞻1月10日报道,今日,矩阵超智公司正式推出第三代全能旗舰级人形机器人——MATRIX-3。这次迭代从底层算法到顶层应用进行了系统性重构。
MATRIX-3的是一款安全、自主、可泛化的物理智能机器人, 它能够执行类似人类的任务,并准备好从专业场景走进人类日常生活的广阔天地,标志着人形机器人从“执行预设指令”迈入“理解并适应物理世界”的新阶段。
为实现这一跨越,矩阵超智的工程团队突破了材料科学、驱动技术、感知算法与人工智能的多重边界,为MATRIX-3注入了以下三大根本性优势:
1. 仿生设计与感知新生: 首次将仿生肤质与高维触觉传感深度融合,使机器人获得接近人类的物理交互直觉。
2. 灵巧操控与拟人步态: 通过革命性的“灵犀之手”与“超能关节”,实现了前所未有的操作精度与如影随形的自然移动能力。
3. 认知内核与零样本泛化: 搭载的全新神经网络具备强大的零样本学习能力,使机器人能快速适应未知任务与复杂环境。
MATRIX-3为人形机器人的规模化、实用化铺平了道路,并为商业服务、制造业、物流、医疗辅助及未来家庭服务奠定了全新的软硬件平台标准。
技术细节如下:
一、仿生设计与感知新生:赋予机器“肌肤”与“触觉”
为了让机器人与人类和环境进行安全、细腻的互动,MATRIX-3引入了革命性的人类仿生工程学设计。
1、3D立体织物仿生肤质: 机身覆盖首创的三维编织柔性织物,它不仅提供柔软、亲和的触感,更内嵌分布式传感网络。这层“肌肤”能缓冲意外接触,并感知接触位置与力度,极大提升了人机共处的安全性。

2、多模态感知融合: 指尖集成了高灵敏度触觉传感器阵列,可感知0.1N的压力变化。
结合升级的视觉系统,基于大规模预训练空间感知基础模型,提升机器人对空间可操作性Affordance的理解和利用,MATRIX-3形成了“眼看”与“手触”互补的视触觉感知系统,使其能像人类一样,通过触摸判断物体的材质、形状及抓握状态,实现对易碎品、柔性物体的精细化操作。
二、灵巧操控与拟人步态:重新定义运动与操作极限
MATRIX-3的运动性能实现了质的飞跃,核心在于其仿生关节与灵巧末端。
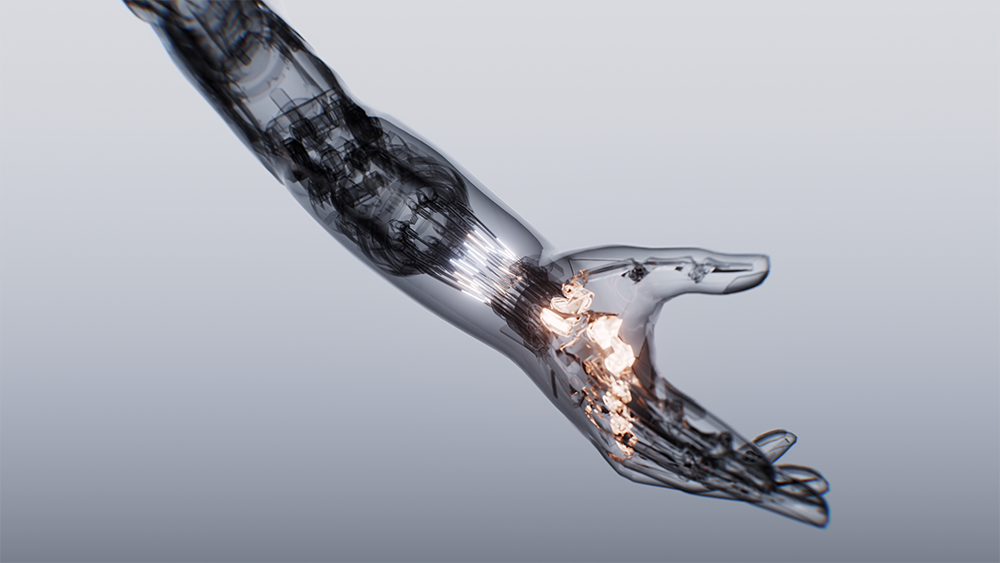
1、灵犀之手(高自由度灵巧手): 搭载全新设计的27维自由度灵巧手,其关节构造与运动范围高度拟人。

结合键绳驱动技术,在保证力量和速度的同时,实现了极致的轻量化与精准控制,可完成诸如使用工具、操作精密仪器、折叠物品等复杂任务。
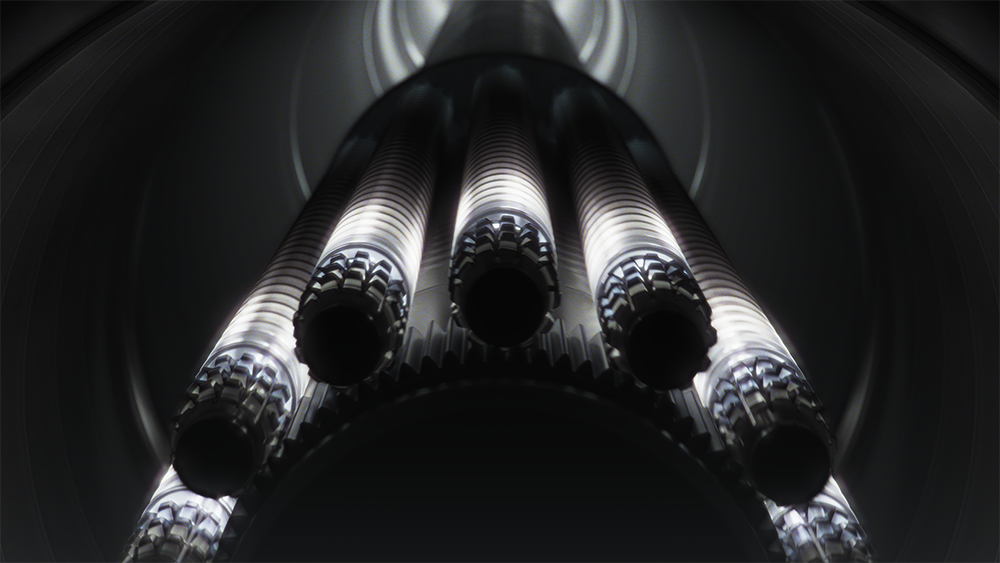
2、自然步态与超能关节: 基于大规模人类运动捕捉和视频数据开发的通用运动控制模型,让MATRIX-3的行走、转身、上下坡姿态如人类般流畅自然。

其动力核心是一体化直线关节,该关节集高功率密度、低噪音与高可靠性于一身,提供了稳定、高效且敏捷的全身体运动基础。
三、认知内核与零样本泛化:“预先编程”到“认知推理”
硬件是躯体,智能是灵魂。MATRIX-3搭载了矩阵超智自主研发的全新神经网络架构。
1、零样本泛化能力: 该系统的核心突破在于强大的零样本任务泛化能力。
无需针对每一个特定任务进行海量数据训练,MATRIX-3便能通过基础物理规律理解和只需简单的指示,并能在全新的环境下快速学习新技能操作新的物体,更大拓展了其应用边界与部署速度。
2、通用智能操作模型: 在数据规模和数据质量驱动下,灵巧操作得以真正实现。机器人能够自主规划抓取策略、避障路径,并实时调整力度与姿态,完成一系列需要手眼协调与即时判断的复合任务。

结语
MATRIX-3是矩阵超智人形机器人走向成熟应用的关键里程碑。它融合了仿生设计、极致灵巧的物理执行以及具有泛化能力的人工智能,构建了一个真正为理解并作用于物理世界而生的智能体。
“MATRIX-3的产品哲学,是让机器智能以最自然、最安全的方式融入人类的物理空间。”矩阵超智公司首席执行官张海星表示,“我们从不是要复制人类,而是创造一种能够延伸人类能力、承担重复性劳动的新物种。今天,我们向这个未来迈出了坚实的一步。”
矩阵超智现已开放MATRIX-3针对特定行业合作伙伴的早期体验计划,并预计于2026年启动首批试点部署。
