







机器人前瞻(公众号:robot_pro)
作者 | 许丽思
编辑 | 漠影
在今年马年春晚舞台上,人形机器人完成了首次魔术表演,端着箱子的手来自一家北京公司。昨天,这家公司宣布融资了。

机器人前瞻2月25日报道,因时机器人近期已完成C1及C2两轮融资,合计融资金额数亿元人民币。
C1轮由中国移动链长基金与深创投联合领投,博原资本、达晨财智、春华资本跟投,C2轮由北京市人工智能产业投资基金领投,启明创投、博原资本、春华资本、金石数经基金、TCL创投跟投。
本次融资将加速其灵巧操作技术研发与核心零部件产品创新,持续提升产品交付能力;积极拓展全球化市场布局,推动商业化落地进程。
因时机器人成立于2016年,已完成灵巧手软硬件全栈技术积累,针对微型化的电机、行星滚柱丝杠、减速器、传感器等核心上游零部件实现自研自产。
同时,其沉淀整套测试与量产生产工艺,面向工业、数采等各类高强度复杂工况作业需求,针对性开发盐雾、高低温、振动及防水测试相关标准。
目前该公司已形成多系列灵巧手产品,覆盖高、中、低多自由度规格,适配多元下游应用场景:既可满足具身本体企业规模化量产、高可靠性的落地需求,也能支撑科研领域的前瞻性研发。

除连杆方案外,团队同步推进腱绳驱动、直驱等全技术路线的研发与落地。
去年12月,因时机器人发布了新一代RH5DG2系列(G2系列)高自由度灵巧手,具有13个主动自由度、18个可运动关节,整手宽度仅95mm、重量约990g,可实现20N指尖抓握力,单指被动载荷达8kg、整手被动载荷达30kg。
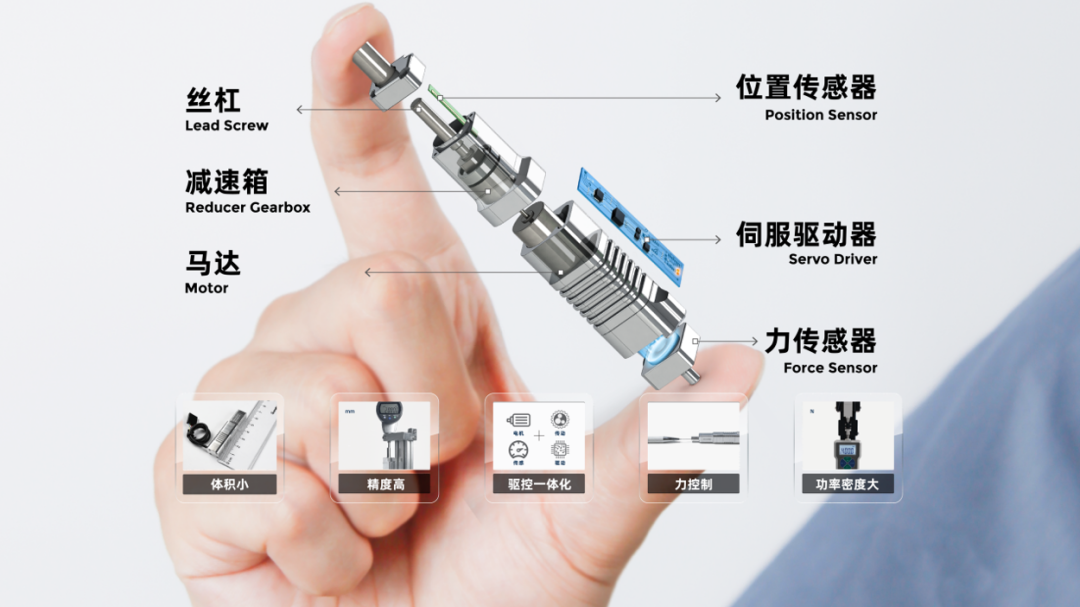
因时机器人还设计研发了多款微型伺服电缸产品,该产品内部有高性能空心杯电机、高精密减速器、丝杠、传感器以及伺服控制系统,够为灵巧手提供力量,驱动手指关节做出抓握等精细操作。
因时机器人创始人蔡颖鹏,本科毕业于北京科技大学电子信息工程专业,硕士毕业于北京航空航天大学机械工程专业。2012年,蔡颖鹏开始创业,成立机器人ODM公司,专注于电力巡检、医疗、教育等领域的定制化机器人开发。2016年,他正式创立因时机器人。

▲因时机器人创始人蔡颖鹏
因时机器人称,2025年,其灵巧手全年交付量突破10000台,客户有宇树、智元、银河通用等众多中国人形机器人企业,以及多家海外知名机器人公司。另外,其微型伺服电缸的年产能达到十万台,应用于机器人、新能源、半导体、3C电子及生物医疗等领域。
