







智东西(公众号:zhidxcom)
作者 | 江宇
编辑 | 漠影
今年春晚,人形机器人再次成为舞台上的焦点。
相比去年颤颤巍巍地扭秧歌,宇树人形机器人已经能够流畅地完成武术、双节棍、醉拳等一系列表演,一波丝滑操作让全网直呼惊艳,也让大众真切感受到人形机器人技术的进步。

随着人形机器人运动能力持续突破,一些支撑这些极限动作的关键技术也开始浮出水面。
近日,北京通用人工智能研究院(简称“通研院”)发布并开源新一代人形机器人通用运动框架OmniXtreme(通极)。
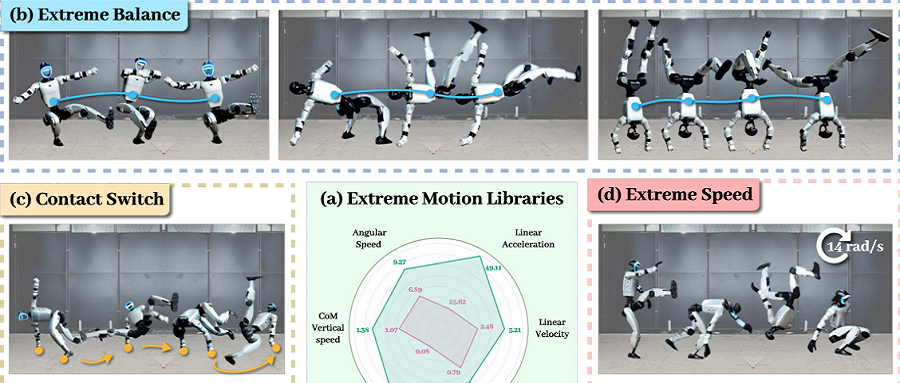
该框架让机器人能够通过一套统一策略完成包括后空翻、托马斯全旋、武术踢击等在内的多种高动态动作,并在真实机器人上实现了超过90%的成功率。
该成果提出了一种新的训练路径:不再为每个动作单独训练策略,而是通过生成式模型与强化学习结合的方式,让机器人掌握一整类极限运动能力。
通研院研究员贾宝雄在接受智东西采访时称:“过去很多机器人控制模型都需要针对单个动作反复调参。OmniXtreme的核心目标,就是找到一种统一策略,让机器人能够学习并泛化不同类型的极限动作。”
一、从“太奶”到“武神”,人形机器人的运动能力跃迁
这一轮人形机器人的火热出圈,可以追溯到2024年的北京大学春季运动会。当时,北京大学智能学院学生方阵中的机器人因步态缓慢、动作僵硬,被网友戏称为“太奶机器人”。

▲2024年4月,北京大学春季运动会智能学院学生方阵
此后两年,人形机器人运动控制能力快速迭代。
2025年蛇年春晚,机器人已经可以完成扭秧歌等舞蹈动作,但整体动作仍然偏机械。同年8月,在首届世界人形机器人运动会上,通研院团队凭借融合探戈、太极、恰恰的舞蹈表演,获得单机舞蹈比赛冠军。

▲2025年8月,通研院在首届世界人形机器人运动会上获得单机舞蹈比赛冠军
到2026年春晚,《武bot》节目中机器人完成武术动作,运动能力进一步突破。
在贾宝雄看来,这一变化背后是一种“技术破壁”,他对智东西形容这一过程时用了一个词:“破次元壁”。“以前机器人更多停留在实验室或者科研展示中,很少有人会觉得它能做到现在这种程度。但随着算法和硬件快速迭代,我们逐渐接受机器人不仅能跳舞,还能完成很多高难度动作。”
二、一套算法完成极限动作,OmniXtreme解决“多动作控制难题”
让机器人完成翻腾、倒立、霹雳舞等高动态动作,一直是机器人控制领域的难题。
近年来,强化学习成为主流技术路线。通过大规模仿真训练,机器人可以逐渐学会复杂动作。但当动作种类越来越多时,系统往往会面临新的问题——动作越多,控制精度越下降。
OmniXtreme试图解决的正是这个问题,该框架采用一种两阶段学习机制。
第一阶段,研究团队先为不同动作训练多个“专家策略”,再利用生成式建模方法,将这些专家能力融合为统一策略。这一过程借鉴了生成模型中的Flow Matching技术,使系统能够学习“动作分布”,而不是简单的动作映射。
▲机器人执行OmniXtreme(通极)框架完成极限运动动作
贾宝雄用一个类比解释这一过程:“可以把它理解为先让机器人去模仿很多顶级舞者的动作,然后再在这个基础上通过强化学习不断调整,使它能够在真实环境中稳定完成这些动作。”
相比传统强化学习需要不断通过奖励函数逼近目标动作,生成式模型在一开始就能建立更完整的动作表达,因此在多动作场景下具有更好的泛化能力。
二、跨过Sim2Real,人形机器人终于能在真实世界翻跟头
在人形机器人研究中,Sim2Real(仿真到真实)一直是核心挑战。很多动作在仿真环境中可以完成,但部署到真实机器人时往往会失败。
OmniXtreme的第二阶段训练,重点解决的正是这一问题。研究团队在强化学习过程中加入了大量真实物理因素,例如:
•电机扭矩—速度关系建模
•制动功率限制
•电池能量传递模型
•更真实的执行器物理模拟
这些设计显著提升了策略在真实机器人上的可执行性。贾宝雄告诉智东西,过去很多团队在部署时需要通过网线连接主机进行控制,而OmniXtreme的目标是实现完全上机运行。
“真正的难点不只是算法本身,还包括模型推理效率和硬件适配。如果这些问题解决,再加上稳定的控制模型,就可以实现现在这种真实部署效果。”实验结果显示,在真实机器人测试中,该方法在多种高动态动作任务上的成功率超过90%。
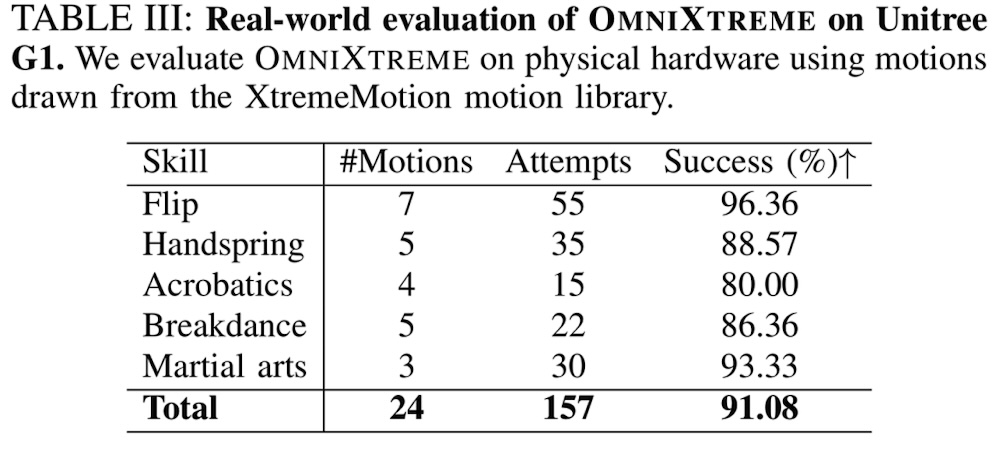
▲真机部署成功率
在不少人看来,翻跟头、跳舞等动作更像“炫技”,似乎与实际应用关系不大。对此,贾宝雄给出了另一种解释:“从科研角度来说,如果机器人能完成这些极限动作,那么在人类能做到的工作场景里,它通常也能胜任。”
他将这一过程比作“先强身健体”,还补充道:“如果机器人能够掌握人类极限运动的控制能力,那么在工业、服务等场景中的任务执行,其实反而会更容易。”
因此,极限运动能力往往被视为机器人控制能力的“上限测试”。
四、 企业做本体、研究院做大脑,一条人形机器人研发路径浮现
值得一提的是,这项研究的主要作者均来自北京通用人工智能研究院通用人工智能协同攻关合作体人才培养计划(简称“通计划”)的联培博士生。
在研发模式上,通研院采用了一种分工协作的路径:企业负责机器人本体,研究院负责核心智能算法。例如,通研院与宇树科技合作建设具身智能联合实验室展开协同研究。
▲2025年9月,通研院在国际机器人学习大会CoRL获杰出论文奖
贾宝雄介绍,很多技术突破其实来自双方工程师之间的交流,“有些仿真和现实之间的差距,是我们和硬件工程师一起讨论后才发现的。”
在产业化方面,通研院还孵化了具身智能创业公司德塔智能(Delta Intelligence)。德塔智能通过通研院积累的技术能力,在工业制造、巡检、家居等场景中探索人形机器人的实际应用。目前相关技术已经在电网巡检、汽车制造等场景开展测试。
支撑这套路径的,还有通研院的人才机制。OmniXtreme的研发团队主要来自通研院“通计划”博士生培养项目。该项目由通研院联合全国多所高校开展,目前已培养300余名人工智能领域博士生。
贾宝雄介绍称,团队目前约有10至20名博士生参与人形机器人研究,“很多学生既在研究院做算法,也会去企业和工程师一起解决真实问题。”
结语:下一步是让机器人真正走进现实
在贾宝雄看来,人形机器人接下来有两个方向会同时推进。
一方面,技术仍然会继续挑战更高难度动作,例如跑酷、复杂环境运动等。另一方面,机器人也需要逐渐进入真实生活场景。
“未来机器人既可能像现在这样参与比赛,也可能成为日常生活中的助手,”他说。
当运动能力、感知能力和自主决策能力逐渐融合,人形机器人距离真正进入现实世界,也许只差最后一次“破壁”。
