








机器人前瞻(公众号:robot_pro)
作者 | 许丽思
编辑 | 漠影
只要三天,开发者就能走完从数据采集到真机部署的全流程,让机器人完成一系列复杂操作!
3月30日,由深圳市人工智能产业办公室指导,自变量机器人、深圳市人工智能行业协会与广东省具身智能训练场联合主办的全球首届具身智能开发者大会EAIDC 2026暨「具亮计划」黑客松·大湾区巅峰赛在深圳落幕。
这场大会吸引上百支队伍报名,涵盖清华、北大、浙大等全国顶尖高校、科研院所及高新企业,最终20支队伍、约60名选手进入决赛。
EDAIC,是全球首个把“真实环境”与“全链路任务”同时写进赛制的具身智能赛事。所有参赛机器人需要面对实时随机切换的环境条件,完成融合长程、复杂推理和精细操作的全链路任务。
说白了,EDIAC给具身智能提供了一个高密度验证平台,帮助行业挖掘真实场景、加速规模化落地。过去行业看榜单、看跑分,EAIDC把注意力重新拉回真实任务、真实部署和真实开发流程。
从这场大会可以看出来,自变量之所以能牵头举办这场全球首届的硬核赛事,核心在于自身具备数据、算力、模型、硬件全栈自研的硬实力,也正因为深耕具身全链条,它才能精准把握模型能力边界,科学设计评测任务与赛制;同时为开发者提供硬件、数据、算力等一整套 “底层基建”,让青年开发者真正摆脱工程琐事,把全部精力聚焦在模型与算法创新上。
以一场赛事为支点,自变量不仅为开发者搭台,更构建了一整套可复用、可推广、推动具身生态走向成熟的系统化方法论。
一、赛题精准切中具身模型核心能力,覆盖真实产业环节
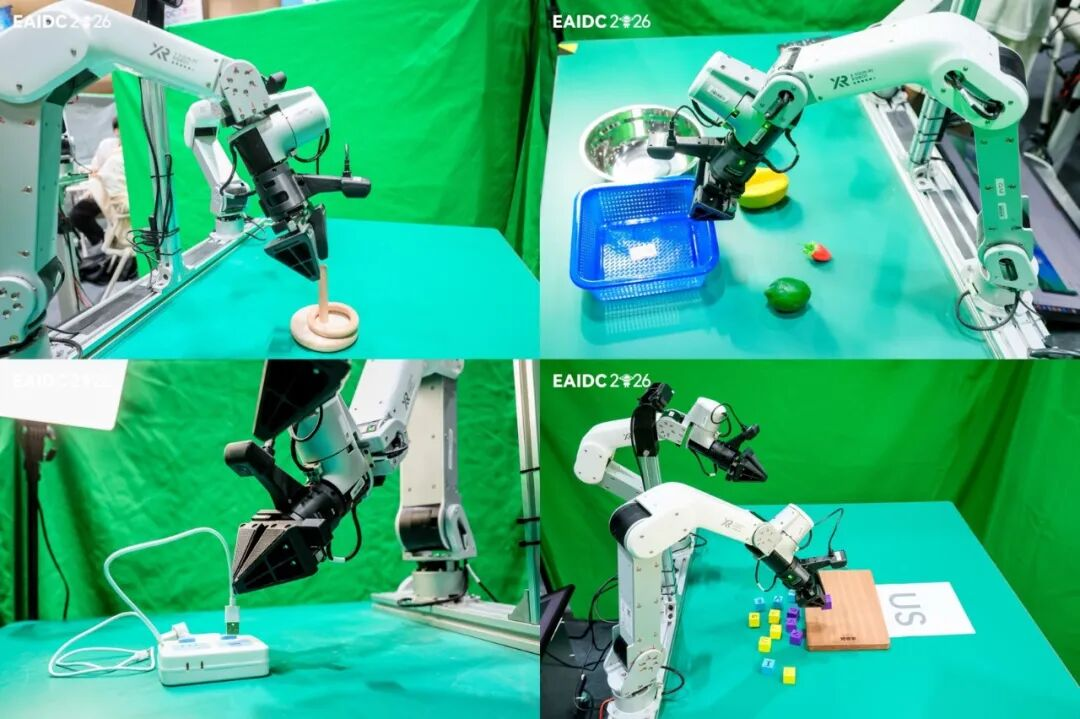
EDIAC决赛题目就四道题:将环套在柱子上、按指令分类水果、插电源线、拼写单词这四项。
这些题目看起来不复杂,但每一道都踩在具身模型的核心能力点上。模型要能听懂指令,再识别物体、判断空间关系、完成动作规划,把感知、决策与执行真正连成闭环。任何一个环节掉链子,任务都会失败。
这四道题,其实对应着机器人落地的核心场景原型:套环更像工业与物流中的基础搬运,考察空间定位与操作精度;水果分拣,接近零售、商超和仓储里的多目标处理;插电源线,贴近3C制造和设备维护中的接触式任务;按顺序拼写单词,对顺序规划和长动作链执行提出了很高的要求,更接近通用服务机器人未来必须面对的多步骤任务编排。
和不少停留在仿真验证、单点演示的测试不同,自变量这套赛题设计,从一开始就把真机、真实应用环节放在核心位置。最终成绩不仅看步骤得分,也综合考量成功率与泛化表现,考察的不是模型能不能在理想条件下完成一次动作,而是能不能在真实世界里稳定完成任务、持续完成任务。
能精准拿捏具身模型的核心痛点、设计出贴合真实产业场景的赛题,正是因为自变量本身在软硬件全栈自研的基础上,对行业痛点、技术难点有着深刻的理解,更有大量真机落地经验。
这也说明,真正有价值的模型,不是最会刷榜的,而是最能在实际任务里稳定跑起来的。进入2026年后,具身智能行业评判标准,已经从“看演示”变成了“看交付”。
二、从选模型到现场真机比拼, 三天完成全流程部署
决赛节奏特别紧凑,三天之内,参赛选手们参赛选手们基于自变量提供的极低延时全链条采训推平台,需要完成从数据采集、模型训练到真机部署,进行一场真实世界里的模型部署测试。
为了尽量降低开发门槛,自变量给选手们备齐了各种装备:百条机械臂、分布式训推一体平台、100+PFlops算力和完整数据采集平台等。
参赛队伍在三天之内,即可从初次接触具身智能基座模型及真机调试的状态,完成从数据采集到真机部署的全流程上手。要知道,专业研究实验室完成类似搭建通常至少需要6个月,时间整整缩短了60倍。而这,都依托于自变量自研的具身基模过程中建设的高性能AI Infra。

比赛中,模型不限,开发者选择目前主流的开源模型包括WALL-OSS、pi0.5,Dream zero等,自变量还配套提供从数据采集、模型训练、真机部署到现场评测的全流程教程。
EDIAC还复刻了真实应用场景中存在的各种不确定性:光照强度、环境温度、障碍物分布、物体摆放位置等。参赛队伍无法依赖预设参数,必须让模型具备真正的环境自适应能力。
这种考验,和仿真环境中可控可重复的测试完全不同,它更接近机器人未来走进工厂、仓库、商超甚至家庭时要面对的真实世界。
通过EAIDC这场真机比拼可以看到,具身智能的发展路径正在发生变化:它不再停留在仿真环境中的反复验证,而是开始在真实物理世界里,通过真机评测暴露问题、校准方向、迭代能力。
对开发者而言,这种真机实战的价值,不只是测出模型表现,更在于帮助他们在真实反馈中找到优化路径,跳出学术研究与产业需求脱节、技术探索与场景落地割裂的困境,让具身智能真正走向现实世界,并在其中打开更多应用可能。
三、从“真开源”到“真共创”,推动中国具身生态迈向新高度
在EAIDC的主题演讲与圆桌论坛环节,多位行业专家表达共识:具身智能已经走出“纸上谈兵”的阶段,行业迫切需要一个能够在真实物理环境中检验技术成熟度的平台。
具身智能需要一个“真靶场”,而靶场上的三张靶纸,就是解决真问题、做到真开源、达到真泛化:研究成果要能解决实际问题,要靠开源推动技术进步和生态繁荣,还要能在真实场景里实现突破性的泛化能力。
具身智能领域开发门槛极高、资源重,很多成果难以复现。真正的开源,应该让更多的开发者能复现、能应用、能再创造,而不是只有少数头部团队能参与。
美团高级总监、无人机硬件研发负责人吴昊天在圆桌上的一个判断很有代表性:未来的商业价值创造应该80%都基于开源的,20%是闭源的。只有这样,行业才能站在巨人肩膀上爬一节,创造增量价值。

从这次比赛可以看出来,从数据、算力、硬件等,自变量把原本属于少数头部实验室的能力开放出来,降低了开发者进入具身智能的门槛,也让生态有了真正扩大的可能。
自变量创始人兼CEO王潜说,未来该项赛事将持续举办,并依托开源平台与软硬件开发系统,汇聚全球开发者,推动中国具身智能生态迈向新高度,真正实现“具身智能平权”。

具身模型的泛化,靠的是在真实环境中的持续训练与反馈闭环。中国在制造、物流、零售、服务等场景上天然密度更高,谁能给开发者降低具身智能的开发门槛,并且把开发者社区和这些真实场景连接起来,谁就更有可能率先跑通生态。
随着越来越多像自变量这样的先行者的出现,让开发者能够共享模型、基础设施,中国具身智能就有机会摆脱智能大脑长期“缺位”的局面,从少数团队主导,走向更广泛的协同创新和生态共建。
结语:具身智能的真正分水岭,不是跑分,而是跑通现实
这场赛事筛选出的不只是优秀队伍,更是一批能反哺社区的开发者。他们在比赛中形成创新成果,未来会继续回流到社区和生态,形成“开源—创新—回馈”的正向循环。对具身智能来说,这种循环比一次冠军归属更重要。
EAIDC这样的大会,之所以有机会成为具身智能领域的行业权威概念,正在于它把行业关注点拉回了真实开发者操作上。一个具身模型能不能打,不该只看它在榜单上排第几,更该看它在开发者手里能否快速上手、稳定复现,并最终在真实环境里跑通。
