







机器人前瞻(公众号:robot_pro)
作者|葛文婷
编辑|漠影
机器人前瞻4月7日报道,近日,荷兰莱顿大学的Daniela J. Kraft教授团队研发出一种柔性单链结构的微型机器人,这种机器人的尺寸在 0.5 至5 微米之间(相当于头发丝粗细的十分之一),移动速度可达每秒 7 微米,可以自主切换运动模式、灵活避障。
这款机器人的设计灵感源于蚯蚓、蛇等能灵活穿梭的生物。研究团队通过3D微打印技术,将各微米级单元串联在一起,并借助自介电泳(sDEP)将其激活,赋予了其生命力。
依托这一结构,该微型机器人可自主切换波浪式运动、旋转掉头等多种运动形态,未来有望摆脱对外部传感器、软件及执行器的依赖,在复杂环境中实现自主导航、避障与自适应运动。
论文链接:https://arxiv.org/abs/2506.15198/
一、通过打印造出来的柔性链状结构
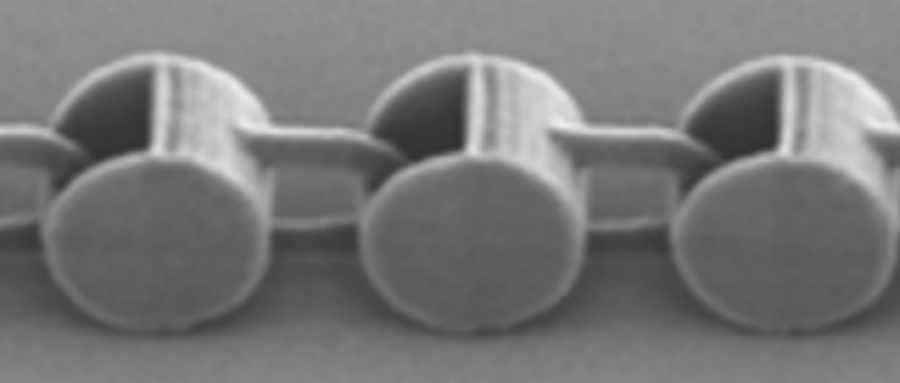
团队基于two-photon polymerization-based 3D microprinting技术,在微米尺度上为机器人设计了一种由柔性单元连接而成的链状结构。
这种链状结构使用了紫外线固化及二氧化硅涂层等后处理工艺,能够有效确保其微米级特征的稳定性以及防止结构粘连。
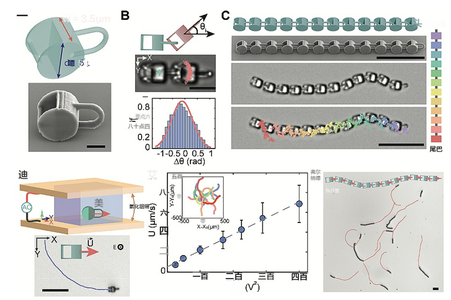
▲连接微米级单元组成的柔性活性链
自介电泳(sDEP)激活后,这一链状结构的机器人便能像蚯蚓和蛇一样自主运动。

二、可自主灵活地切换运动模式
研究表明,该机器人结构内部存在着形状与运动的相互反馈,从而催生出多样的动态行为。
当机器人的链状结构被电场激活后,单元间的偶极排斥作用会让链条自然伸直,使其像一列小火车般直线行进。
而一旦头部受阻或负载重物,物理反馈机制会瞬间接管,无需任何指令,它便能自动切换成类似鞭毛的摆动或波浪式游动,必要时甚至还能做出圆周运动与间歇性翻滚。

这些自适应转变由驱动力、弹性弯曲与外部约束共同作用实现。
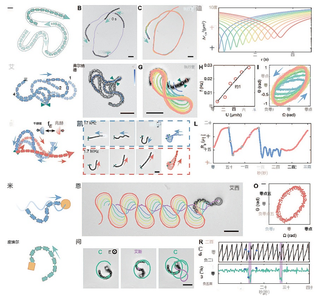
▲不同运动模式之间可实现自主切换
三、可智能感知并适应复杂环境
这类微型机器人依靠形态与运动之间的实时反馈,形成了智能感知并适应复杂环境的能力。
当前进中遇到墙壁时,它能智能感知到运动受阻,进而使自身链状结构发生弯曲。由于其所有的单元都具备重新定向的自由度,这种弯曲会调整首端单元的方向,从而改变整体结构的前进路径,使其逐渐偏离墙壁。
由此,链状结构的弯曲形态所引发的反馈,促成了其进行高效且自主的重新定向。

在布满密集障碍物的环境中,该机器人也不会被卡住。
凭借柔软可变形的身体,它们能在一堆障碍物中灵活穿梭、轻松转弯。
不仅如此,它还能通过空间限制和相互作用力“感知”障碍物的布局,并做出直线行进、S形穿梭、90°转弯乃至180°U形掉头等多种运动方式。
当两条链条相遇时,它们能够及时感知到彼此的存在,并迅速调整自身形态,以便相互避让、防止碰撞。
即便在完全没有通路、极度拥挤的环境里,它们也能像蚯蚓在泥土中活动一样,依靠自身活动推开障碍、掘出空间继续前行。

结语:以形为脑、自主穿行,可适用于精密仪器检测等场景
Daniela J. Kraft教授团队研发的这款微米级链状结构机器人,实现了形态与运动之间的实时相互反馈。它无需依赖传感器、算法软件或外部控制,便能在障碍物密集、空间狭窄拥挤的复杂环境中,自主快速调整行进方向、灵活穿梭导航,并有效规避碰撞。
展望未来,这种不依赖复杂电路、仅靠物理结构就能“思考”的微型机器人,为机器人领域开辟了新纪元,有望在精密器械检测、靶向药物递送以及微创医疗等场景中发挥重要作用。
