








机器人前瞻(公众号:robot_pro)
作者 | 李水青
编辑 | 漠影
当下,人形机器人正从实验室走向真实场景落地,灵巧手行业也站在爆发前夜。
但大多数灵巧手仍然卡在一个尴尬的位置:要么自由度很高但用起来不可靠,要么性能很强但没法量产。很多产品能在展台上完成炫技动作,却很难在产线、仓储、家庭等复杂而非结构化环境中稳定工作。
近日,灵巧手头部玩家曦诺未来Xynova正式推出全新的Xynova Flex 2,试图用打破这一“灵巧性-可靠性-规模化”僵局。

这款号称全球首款采取“腱绳+电机直驱”混合驱动的仿生灵巧手,不再只是一味地追求动作准的“硬手”,而是进化成了会感知、能思考、可拓展的“智手”。
Flex 2有很多新的特点:毫秒级响应、0.05N的力控精度、多模态感知融合、小脑式的反射控制……这些能力加在一起,让灵巧手学会着像人一样“聪明地操作”。
我们惊喜地看到,行业似乎正从单纯比拼“多少自由度、多高负载”的硬件参数竞赛,迈入“感知—控制—决策”闭环的系统能力博弈。而曦诺未来Xynova,跑在了前列。
曦诺未来Xynova于2024年底创立于杭州,已先后获得宁德时代旗下溥泉资本、小米战投等资本与产业方支持,并在当时推出了全球首款全自研量产的高自由度腱绳传动灵巧手Xynova Flex 1。最新亮相的Flex 2,是其再次向行业投下的一枚重磅炸弹。
下面,我们将从技术到落地,拆解这只“智手”如何重新定义灵巧操作,以及改变了什么。
一、从技术金字塔出发,看Flex 2如何定义“智手”六边形战士
理解Flex 2的进化,我们需要先建立一个坐标系。
灵巧手的发展遵循一座清晰的“技术金字塔”。
塔尖是顶层价值:实现通用灵巧操作,解决“什么都能干”——像人手一样理解环境,实时自适应调整策略,应对千变万化的任务。
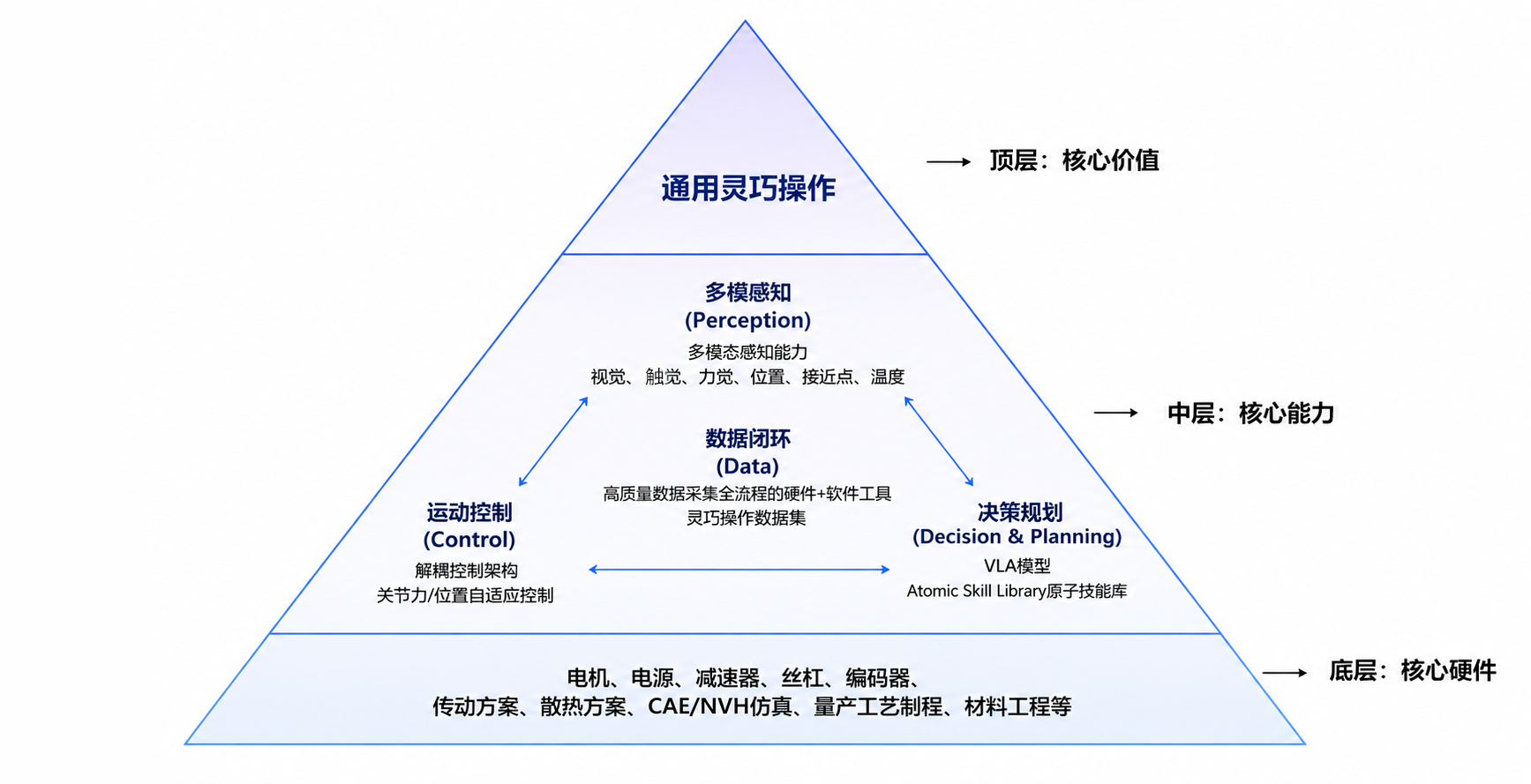
中层是智控能力闭环——感知、控制、决策通过数据闭环协同运转。这是灵巧手走向通用灵巧操作的必经之路,也是技术金字塔承上启下的关键。
数据如何流动?首先,多模态感知(视觉、触觉、力觉、接近觉)采集环境信息;其次,决策规划将任务拆解为原子技能;然后,运动控制毫秒级响应,自适应切换力控或位控;最后,每一次操作的传感数据与执行结果回流,持续训练模型、优化策略。
而中层闭环深深扎根于底层硬件:高自由度传动、高精度编码器、高响应驱动单元缺一不可。底层解决“能动”的问题,过去行业比拼的重点就在这里。只有三层贯通,灵巧手才能真正从硬件走向智能化执行末端。
顶层则是价值落地,实现通用灵巧操作,解决“什么都能干”。未来世界理想中的灵巧手,将能像人手一样理解环境,并根据任务实时自动调整策略,遇到什么棘手问题都能应对。
目前,行业正从底层的“军备竞赛”攀爬到第二层的“智控闭环”。Flex 2的升级,是预示这场跃升的一个代表作。

1、灵与巧:毫秒级响应与微牛级力控,复刻人手的“肌肉记忆”
从能抓到会抓,是灵巧手的第一道分水岭。
一只灵巧手首先要“灵”,Flex 2拥有一副仿生的“骨骼”:23个自由度(19主动+4被动),整手尺寸、关节位置比例严格复刻人手手型。但更关键的是它的“肌肉”与“神经系统”,仅400g的轻量化手掌,却能实现每秒2次握拳伸展,如同人手般敏捷轻盈。

这种敏捷背后是硬核的控制响应能力:指令下达延迟≤10ms,感知反馈延迟≤5ms,闭环控制周期≤1ms,这意味着,手指的每一次动作调整都毫秒级完成,快到人眼根本无法察觉。这真正构成了毫秒级的动态响应。
但“灵”不等于“巧”。很多机械手可以抓住东西,却很难判断该用多大力。抓矿泉水瓶时用力太小会滑落,用力太大可能压变形;抓樱桃、草莓、纸张这类柔软或脆弱的物体时,力控稍有偏差,就会破损、变形。
Flex 2的关键在于,它统筹兼顾响应、精度和力控——手指重复定位精度≤±0.1mm,力控精度高达0.05N。这意味着它不仅能转身稳稳握住一个金属工件,还能用指尖轻轻捏住一颗饱满的樱桃而不使其破皮。
技术层面,Flex 2采用“腱绳+直驱”混合驱动路线。
它通过高功率密度微型电缸的快速精准响应,结合高精度关节位置的闭环控制,以及带载反驱技术实现的力位混合控制,成功克服了腱绳的非线性短板。在保持其柔顺性优势的同时,Flex 2实现了不输于刚性传动的精度与响应速度,让“柔”与“准”在一只手上和谐共存。
2、智:多模态感知+“小脑”式控制,学着像人一样聪明地干活
如果说“灵”与“巧”代表了执行器的卓越躯壳,那么“智”则赋予了它一个独立且强大的“小脑”。Flex 2是一个具备本地智能的主动式操作终端,这种智能化是它区别于一代和众多竞品的核心。
Flex 2集成了视觉(腕部相机)、触觉(指尖3D触觉、指腹、手掌)、接近觉(掌心LiDAR+红外)和力觉四类传感器,从而构建了一个多维的、互补的多模态感知网络。

掌心接近觉在最后几厘米补足视觉盲区,指尖触觉在接触瞬间读取压力分布和局部形变——这些感知数据被实时喂给内置的类小脑控制算法,其中包括接触反射、防滑反射、柔顺抓握反射等本能反应机制。
我们用生活中“挑樱桃”的例子,生动展示了从感知到决策的完整智能闭环。当Flex 2收到“把软的挑出来吃,硬的放冰箱”这一自然语言指令后,系统的工作流如下:
(1)“大脑”任务拆解:将长时任务分解为“定位捏取→感知硬度→分支决策(软给人/硬入盘)→移动放置”等子任务链。
(2)原子技能调用:为每个子任务匹配“捏取”“捏合感知”“移动”“递送”等原子技能库中的标准动作。
(3)“小脑”实时控制:在捏取瞬间,腕部相机和掌心接近觉负责引导手指靠近樱桃;指尖触觉传感器接触樱桃,通过压力分布和形变数据判断软硬;力矩传感器实时反馈抓握力。小脑根据这些信息,以毫秒级频率动态调整力控策略:对软樱桃执行“轻拿轻放”的纯力控,对硬樱桃则切换到更稳定的位置控。

这背后,是曦诺未来Xynova构建的“感知-决策-控制-数据”全链路协同。
3、劲、美、稳:重新定义可靠性与人性化
在“灵、巧、智”三大核心维度之外,“劲、美、稳”共同构成了Flex 2从产品走向商品的基石。
(1)劲:12kg峰值抓取负载、4kg额定负载、单指尖力≥15N(拇指≥20N)。这意味着Flex 2既能完成精密装配,也能胜任大部分轻量级工业搬运场景,实现了灵巧与力量的统一。
(2)美:极致仿生,形神兼备。柔性可换皮肤、模拟大鱼际/小鱼际的加厚柔性材料、仿人指甲盖、多区域状态指示灯……这些设计让一只机械手具备了“人味儿”。
这不仅是美学追求,更是功能需求:仿生尺寸与关节比例,让它能无缝使用为人类设计的工具;仿人指甲盖则提供了抓取薄片物体所需的刚性支撑。
(3)稳:这是所有性能的最终背书。100万次开合寿命、腱绳抗蠕变设计、主动散热系统(-10~50℃宽温域运行)、MTBF≥5000小时——这些数据共同指向一个关键词:产品级可靠性。Flex 2被设计为一台可以扔进产线7×24小时工作的设备,而非橱窗里供人参观的展品。

值得注意的是,Flex 2是全球首款明确采用“腱绳+直驱”混合驱动的量产灵巧手。
曦诺未来Xynova坚持这条技术路线的背后,是深刻的系统考量。腱绳驱动是实现轻量化(仅400g)、高自由度(23个)和安全柔顺交互的最优路径。它将笨重的驱动单元后置,让手本身极致轻盈;它天然的缓冲特性,能吸收碰撞能量,是人机共融场景的安全保障。
更重要的是,它为“智手”提供了最佳载体——硬件不再成为负担,感知、控制和决策系统尽情发挥。可以说,混合驱动方案是Flex 2得以从“硬手”走向“智手”的关键底座。
从对Flex 2的技术拆解我们可以看到,真正的灵巧是整套系统的胜利。
二、曦诺未来Xynova的产业卡位:要造“智手”,更要构建可量产的智能底座
纵观灵巧手产业,业内从不缺乏性能卓越的“实验室孤品”,真正制约行业发展的,是如何将一只“好手”变成百万只“可用的手”。曦诺未来Xynova从创立之初就将“量产”刻入了基因。
这种量产能力体现在Flex 2设计的每一个细节中。贯彻DFM模块化设计,其让故障件可以在几分钟内完成替换;将Demo阶段的定制化、非标零件替换为标准件或通用加工件;优化绳轮、关节、底座等核心结构公差链;并通过工艺文件和SOP标准化,实现从加工、装配、测试到包装的流程化。这一切,让“换线即量产”成为现实。

曦诺未来Xynova更深层次的差异化壁垒,在于其全链路自研自产能力。从8mm无刷空心杯电机、7mm行星滚柱丝杠,到完整的微型电缸,再到运控算法框架与AI参数寻优算法,曦诺未来是国内极少数能在“方寸之间”实现电机、电控、传动、算法全栈自研的公司。
这种软硬件的深度耦合,是保证Flex 2“既灵巧又耐用”的前提。自研意味着能针对控制算法优化电机力矩波动,能根据传动特性设计编码器分辨率,每一个环节都是可优化、可迭代的整体。
更值得一提的是,曦诺未来Xynova正在构建从控制到感知再到决策的数据闭环。兼容ROS系统、开源操作数据集、提供完整的开发和仿真工具链、支持OTA升级……曦诺未来并不打算做一个封闭的“手”的供应商,而是希望打造一个能让全球开发者共同贡献的灵巧操作生态。
随着数据闭环的持续运转,Flex 2的技能库将从预置的“抓、捏、拧、插”,不断扩展到更复杂的装配、工具使用乃至家庭服务任务。
据悉,曦诺未来Xynova将在6月携带Xynova Flex 2及全系列产品,亮相奥地利全球机器人与自动化盛会ICRA 2026。届时,现场观众将有机会亲眼目睹Flex 2如何完成“挑樱桃”、“插拔连接器”、“工具使用”等一系列精细操作,亲身感受从“硬手”到“智手”的产业脉搏。
结语:灵巧手的终局,是成为真实世界的“通用接口”
人形机器人要进入真实世界,最终必须面对一个朴素问题:它能不能使用人类世界里的东西,像人一样工作?
这很大程度上取决于灵巧手。灵巧手的终局竞争,不在于自由度数字的高低,也不在于单点技术的炫酷,而在于能否成为连接数字世界与物理世界的“通用接口”。这个接口需要足够聪明、足够灵巧、足够可靠、足够开放。
曦诺未来Xynova Flex 2的发布,让我们看到了这种可能性正在加速成为现实。当一个具备感知、思考和学习能力的“智手”终端,被大规模部署到工厂产线、商业服务乃至家庭生活中时,具身智能的“最后一厘米”难题,才真正迎来了它的解法。
