








机器人前瞻(公众号:robot_pro)
作者 | 江宇
编辑 | 漠影
全球机器人圈,再次将目光投向了ICRA。
作为机器人领域公认规格最高、竞争最激烈的国际顶会之一,ICRA每年的最佳论文名单,几乎都会成为下一阶段技术路线的重要风向标。
近日,全球机器人界顶级学术会议ICRA 2026各大奖项正式揭晓,一项通过语义对应实现新类别物体双臂操作自适应的研究Bi-Adapt成功突围,斩获提名奖。
这并非该团队首次大放异彩,在去年的ICRA 2025上,其解决多形态灵巧手统一交互泛化的研究D(R,O)Grasp就已从四千余篇投稿中脱颖而出,斩获最佳论文大奖。
凭借这两项直击机器人操作泛化痛点的突破性成果,该团队在伯克利、麻省理工等全球老牌高校的包围中脱颖而出,成为近五年来亚洲唯一连续两年入围该奖项最终评选的队伍。
而站在这两项世界级学术成就背后的,正是由首席科学家邵林带队的中国具身智能企业——RoboScience机器科学。
一、连续两年闯进ICRA最佳论文名单
ICRA在机器人领域的地位无需多言。这场由IEEE主办的年度盛会,长期代表全球机器人研究最高水平,其最佳论文是当之无愧的“机器人学界风向标”。
其中,机器人操作方向的竞争尤为激烈。今年同期进入最佳论文核心名单的团队,还包括伯克利大学、麻省理工学院、斯坦福大学、清华大学等国际顶级高校。
而RoboScience机器科学首席科学家邵林团队已经连续两年获得这一奖项认可。
2025年,邵林团队凭借D(R,O)Grasp获得Robot Manipulation and Locomotion最佳论文奖,成为近五年来亚洲机构首次以第一单位身份获得这一奖项的团队。一年之后,Bi-Adapt再次进入该奖项Finalist名单,五年内亚洲唯一。
而在ICRA 2026论文录用结果中,邵林带领的团队共有10篇研究成果成功入选。
这些论文聚焦具身大模型、灵巧抓取、社交导航、低成本力感知与混合任务规划等核心方向,系统性地推进了具身智能的技术边界。
这背后,是RoboScience机器科学在机器人操作方向上持续兑现的创新能力。
两篇获奖论文虽然研究方向各有侧重,但都集中指向“机器人操作”这一核心命题:D(R,O)Grasp解决的是跨灵巧手的泛化问题,Bi-Adapt解决的是双臂协同的泛化问题,本质上都在提升机器人在真实环境中“动手”的能力。
这也是当前具身智能产业最关心的问题之一。 邵林团队连续两年在操作领域登顶,说明他们恰恰把握住了具身智能落地的核心技术命门。
二、如何破解具身泛化问题?打破“环境幻觉”与“一机一策”
无论大脑多么聪明,如果机器人一换场景就频频翻车、换个硬件就得“从头重训”,具身智能就永远无法真正走进千行百业。
这正是当前VLA路线面临的现实难题——机器人已经可以通过视觉、语言理解任务,但一旦环境变化、物体变化、动作链变复杂,就容易出现动作幻觉、泛化失败。
今年获提名奖的Bi-Adapt,正是在解决这一难题。双臂协作一直是机器人操作中的高难度任务,传统方法高度依赖大量标注和重复训练,而Bi-Adapt试图用少样本甚至零样本方式完成新物体适应。
▲Gripper
▲LeapHand

▲XHand
这意味着机器人面对新物体时,不需要再为每一个工件重新采集海量数据。对于工业制造、物流分拣、仓储等场景而言,这一点非常关键。现实世界中的工件和商品种类数以万计,不可能每出现一个新品就重新训练一次机器人。

而去年获奖的D(R,O)Grasp,则瞄准了另一个长期困扰行业的问题:不同灵巧手之间难以共享操作能力。
过去行业普遍采用“一机一策”的方式。换一个机器人手型,就要重新训练模型。D(R,O)Grasp通过构建机器人手与物体之间的统一交互表示,实现了跨本体泛化。
同一套模型可以支持LeapHand、Shadow Lite、XHand、SoftHand等多种不同类型灵巧手,覆盖3指、4指、5指以及软体、硬质等不同结构。
其平均成功率达到87.53%,并支持5FPS实时动态交互。在后续研究中,团队进一步将跨本体抓取成功率提升至94.83%。

▲Real-world Results
无论是Bi-Adapt还是D(R,O)Grasp,RoboScience机器科学想解决的,其实都是机器人泛化能力问题:机器人能不能像人一样,第一次见新物体、换上新工具也能快速上手操作。
三、VLA之后,为什么开始押注VLOA?
要想让机器人不再盲目试错,必须在“看懂”和“动手”之间,给它装上一个能预演真实物理法则的引擎。这是RoboScience机器科学选择VLOA路线的重要原因。
当前主流的VLA模型,能识别环境、理解语言,但缺少对未来状态的推演能力,因此动态场景稳定性不足。
RoboScience机器科学给出的答案,是VLOA——Vision-Language-Object-Action。VLOA创新性地引入了“Object Trajectory”这一关键接口:以物体的连续3D点云轨迹作为表征,在视觉语言理解与动作执行之间架起了一座桥梁。
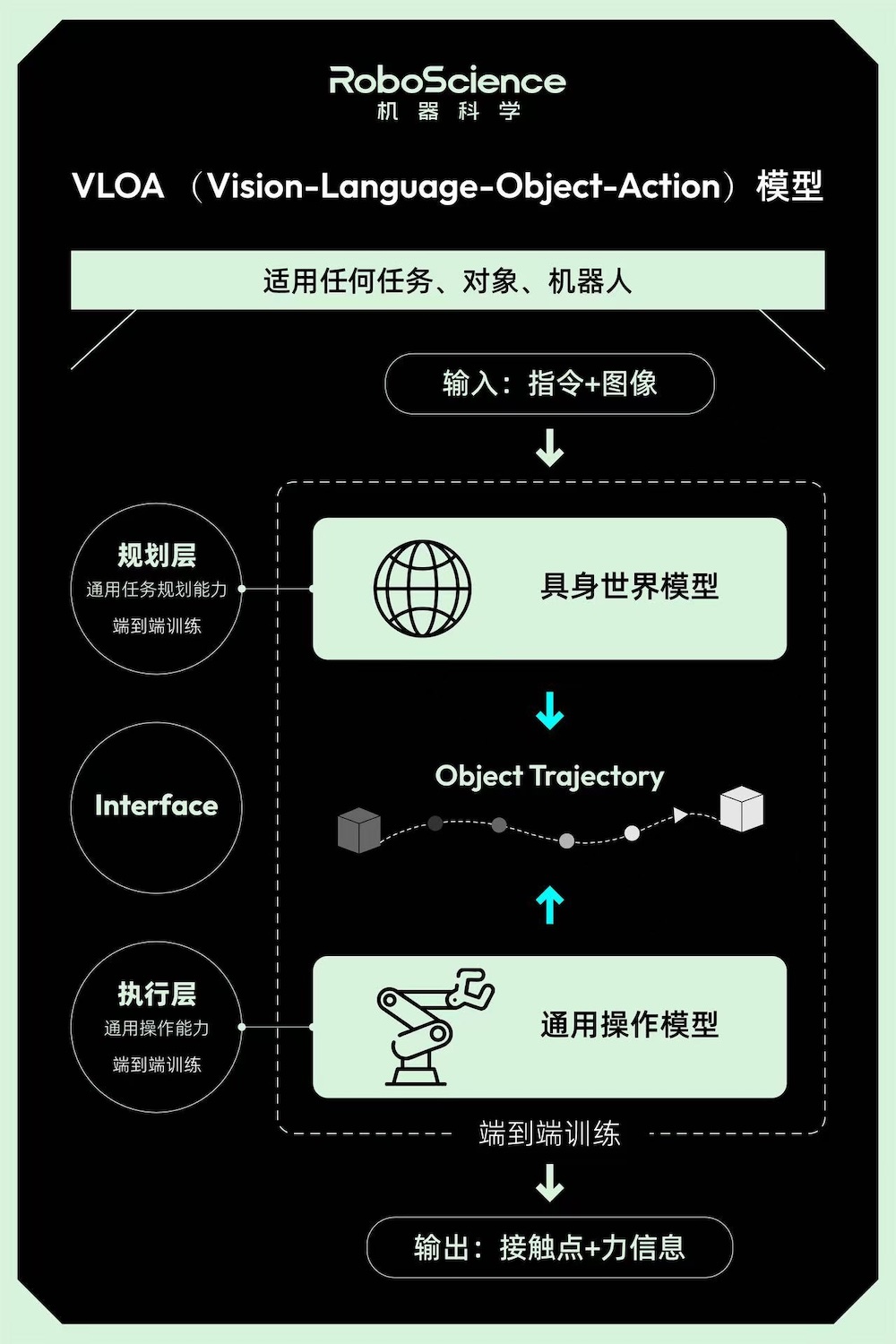
其整体架构由具身世界模型与通用操作模型组成。
世界模型先预测未来物体状态与轨迹,再由操作模型执行具体动作。与传统“视频生成式世界模型”不同,RoboScience机器科学具身世界模型并不是生成宏大视频世界,也不需要到像素级别,其重点放在机器人真正执行任务所需要的信息上。
支撑这套架构的,是规模庞大的数据体系。RoboScience机器科学已积累数百万小时以物体为中心的高维多模态操作数据集,并以每周数十万小时的速度增长。
这一体系已经在复杂任务中得到验证。2025年5月,RoboScience机器科学展示了一项一镜到底家具拼装任务。
机器人仅需读取说明书,即可自主完成零件识别、插接、旋转、多步骤拆解与组装。过程中涉及手内操作、双臂协同、精准力控、部件嵌入等多个高难度环节。即便人为拆解部分结构,系统依然能继续完成后续步骤。
与此同时,RoboScience机器科学还在底层构建了高精度通用物理仿真平台RoboMirage。该平台支持刚体、软体、多关节结构以及复杂接触动力学模拟,可生成大规模高质量操作数据,为模型训练提供数据闭环。

▲橡皮筋

▲高脚杯

▲扑克牌
▲明日环
四、斯坦福机器人圈走出的创业团队,把“操作泛化”推向真实场景
连续两年入围ICRA核心奖项的背后,也是一支颇具代表性的创业团队。
RoboScience机器科学成立于2024年12月,由邵林和田野联合创立。
邵林本科毕业于南京大学,随后进入斯坦福大学攻读博士,师从机器人学者Jeannette Bohg,联合导师为美国三院院士Leonidas Guibas。在国内具身智能创业圈中,他与银河通用创始人王鹤、穹彻智能创始人卢策吾、Hillbot创始人苏昊等均属于斯坦福机器人体系的重要代表人物。
另一位联合创始人田野则毕业于中科大物理系,后进入斯坦福AI Lab,师从吴恩达。在创业之前,他曾担任苹果AI Platform技术负责人,打造了被誉为“苹果的PyTorch与CUDA”的核心AI平台,推动多项关键AI技术在苹果生态大规模落地。
其团队还集结了来自斯坦福、中科大、新加坡国立大学等顶尖学府,以及苹果、字节、腾讯、大疆等头部企业的顶尖人才。
资本层面,京东集团、商汤科技、达晨财智、招商局创投、零一创投、普华资本等多家CVC和财务机构已相继进场。近期,其又获得了多家国内外产业龙头、互联网大厂、头部财务机构等多轮注资。
落地层面,RoboScience机器科学已与零售、物流、工业、康养等领域合作伙伴展开试点合作,并计划在今年实现标准化机器人本体产品量产。
具身智能的真正壁垒,已经从单点算法能力全面升级为全栈工程化能力。目前看来,RoboScience机器科学已经在这条赛道上抢跑。
结语:全球机器人圈,再出一个国产标杆
从连续两年进入ICRA最佳论文核心名单,到围绕“操作泛化”持续推进技术路线,RoboScience机器科学身上值得关注的,其实并不只是某一篇论文本身。
这支团队背后,聚集的是一套相当突出、也越来越具代表性的中国具身智能创业组合:斯坦福学术体系、苹果AI工程经验,以及国内完整的机器人产业链与场景资源。
邵林与田野的两人组合,也让RoboScience机器科学从一开始就是同步推进模型、仿真、本体与场景落地。
全球机器人圈,正在看见一个新的国产标杆。
