








机器人前瞻(公众号:robot_pro)
作者 | 江宇
编辑 | 漠影
机器人前瞻6月8日报道,具身智能行业出现了一笔颇具代表性的交易。
原力灵机宣布通过股权并购方式完成与机器人公司Atomix的合并,并同步完成新一轮融资。这一轮投资方名单中,既包括智谱、阶跃星辰、商汤等头部大模型公司,也出现了华勤技术、上汽恒旭等产业资本。而另一巨头阿里也已早早下注。
放在过去两年具身智能的发展进程里,这笔交易有着特殊意义。进入2026年下半场之后,一个待解的问题早就摆在所有玩家面前:模型怎样获得持续增长的数据,机器人又怎样获得足够聪明的大脑?
过去,行业主要依赖数据采集、仿真生成和模型扩张推动能力提升;随着真实世界高质量数据逐渐成为稀缺资源,不少玩家的“Scaling”被束缚了手脚。原力灵机则开始尝试另一种思路——直接进入场景,让机器人在真实业务中持续生产数据。
如果说前一种模式属于“采集型Scaling”,那么后者更接近“场景型Scaling”。
原力灵机与Atomix的合并,使具身智能赛道第一次出现了一个同时拥有模型与场景的“超级组合”。
一、行业进入下半场,模型与场景更需要站到一起
过去两年,具身智能行业最热闹的是融资;今年下半年,一个新的关键词开始出现——整合。
原力灵机的这轮操作,关键在于通过股权并购,一步到位地构建了一个“场景型Scaling”的数据飞轮。
在这个飞轮里,数据生产、模型训练、能力部署、数据回收这一整套流程,能在同一主体内部高效流转。
Atomix庞大的机器人机队每天产生的海量真实作业数据,不再是“死资产”,反倒直接成为原力灵机具身大模型的“活水”。反之,模型能力的每一次提升又能即刻部署到Atomix的场景中产生效益。

与此同时,这次投资方阵容也绝非简单的模型厂商与产业资本背书,实际上是从不同维度为“场景型Scaling”这一新范式集体投下信任票。
智谱、阶跃星辰、阿里、商汤等大模型厂商同步出手,意味着通用大模型竞争正向物理世界延伸;华勤技术、上汽恒旭等产业资本入局,则代表着制造业对原力灵机落地价值的认可。
有意思的是,旷视系团队与昔日对手商汤在具身赛道罕见“握手言和”,或许比任一单边押注都更具说服力。
放眼全球,特斯拉的Optimus直接在自有工厂迭代,Figure AI与宝马合作,这种“模型与场景绑定、迈向“场景型Scaling”的趋势已然明朗。

▲Optimus(左)与Figure 02(右)
具身智能进入下半场后,单纯依靠采集和仿真的Scaling会越来越难。谁能拿到真实场景,谁就更有机会让数据飞轮持续转起来。
二、具身智能的“Coding时刻”,为什么会是Picking
如果要为具身智能寻找一个类似大语言模型“预测下一个token”那样的基础任务,来驱动Scaling,原力灵机给出的答案是:Picking(抓取与放置)。
原力灵机创始人兼CEO唐文斌曾言:“具身智能迎来了自己的Picking时刻。”这一判断颇具具战略洞察,因为picking从某种程度而言,能够成为“场景型Scaling”的最佳入口。换句话说,Picking是让机器人在真实业务中“边干边学”的最短路径。

▲原力灵机创始人兼CEO唐文斌
- 这一任务拥有行业罕见的大规模真实数据来源。
全球物流仓库每天产生的数十亿次抓取动作,是一个天然的超大规模数据集。
每一次抓取,都自带一套完整的多模态数据标签。这种近乎免费且自动标注的数据,是互联网图文数据无法比拟的。
- Picking拥有天然可验证的反馈机制。
具身智能的反馈来源于物理定律。抓取是否成功、货物是否受损,是即时、客观的。这种高密度、高质量的反馈信号,为强化学习提供了近乎理想的训练环境。
- Picking具备明显的迁移价值。
东西有没有被抓起来、是否放到了正确位置、包装是否出现损坏,系统都能够即时判断。这种协调、实时规划和精准力控的集合,是装配、分拣、家庭服务等几乎所有后续复杂操作的“元技能”。
可以说,机器人如果掌握了稳定、通用的Picking能力,近乎拿到了通往泛化操作的敲门砖。其掌握的能力便能够迁移到分拣、装配、仓储、家庭服务乃至医疗辅助等大量复杂场景。
某种程度上,Picking正在成为具身智能领域的重要基础能力。
而这也是原力灵机选择在此时与Atomix合并的重要原因之一。
目前,Atomix已经完成超过500个项目交付,业务覆盖20多个国家,服务优衣库、蜜雪冰城、宁德时代等头部企业,日均出货量超过60万件。
Atomix也是中国具身智能赛道目前最大、最真实的物流Picking数据源。
对于具身智能而言,Picking正在成为连接真实世界数据与模型能力增长的重要入口。而围绕Picking形成的数据飞轮,也正在成为场景型Scaling的重要基础。
三、DM0、Dexbotic与RoboChallenge,数据飞轮背后的基础设施
数据飞轮能够运转起来,背后还需要完整的技术基础设施支撑。
对于原力灵机而言,这套基础设施主要由DM系列具身原生大模型、Dexbotic开发平台以及RoboChallenge真机评测体系构成。
其中,DM0是整个体系的核心。
这款模型在RoboChallenge具身智能真机评测中位列全球第一,也是全球首个融合机器人多感知数据、智能驾驶数据与互联网数据联合训练的具身大模型。
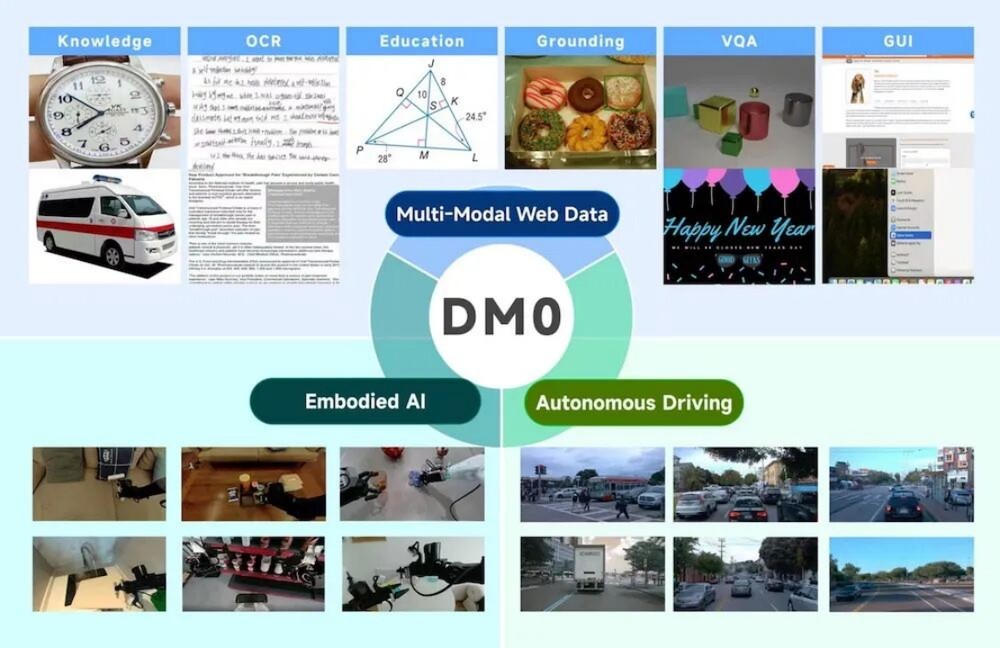
模型覆盖灵巧操作、环境导航和全身控制等核心任务,并支持8类机器人本体联合训练。

某种程度上,DM0承担的是“大脑”的角色,而Atomix每天在真实物流场景中产生的数据,则持续为这个“大脑”提供训练养料。
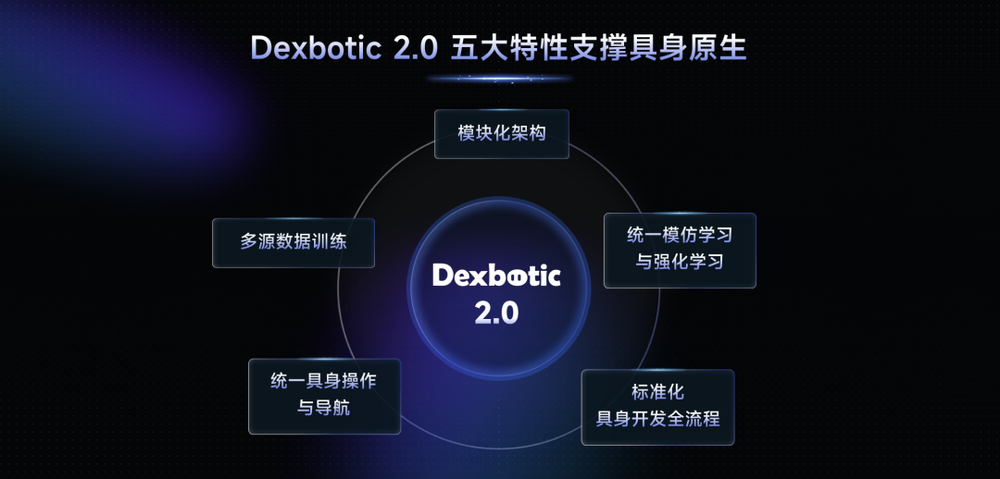
围绕DM0,原力灵机还搭建了Dexbotic与RoboChallenge两套基础设施。
前者负责数据管理、模型训练和真机部署,已经吸引清华大学、北京大学、普林斯顿大学、帝国理工学院等高校,以及腾讯、北京人形机器人创新中心等机构使用;
后者则与Hugging Face联合发起,累计完成超过8万次真机测试,已吸引智元机器人、星海图、星动纪元等近20家具身智能企业参与共建。阿里千问、小米、千寻智能等团队也曾参与相关测试与评测工作。
整体而言,DM0、Dexbotic和RoboChallenge,则构成了支撑数据飞轮运转的另一半基础设施。
在此基础上,原力灵机也在进一步扩展应用场景。
其即将发布的“飞拉达”项目,将展示DM0跨机型部署能力以及多类型机器人混合作业能力,包括三级分拣、多机器人协同调度等场景。这也是其“模型+场景”思路的一次集中展示。
按照规划,下一代DM模型、通用机器人本体以及新一代应用基础设施将在今年7月陆续亮相。
与此同时,伴随业务整合完成,原力灵机还正式启动“百人全球招募计划”,开放具身智能核心算法、机器人学习、大模型训练和工程落地等方向岗位,为后续模型研发、产品落地和全球化扩张储备人才。
结语:具身下半场,竞争的天平或将倾向系统玩家
当“场景型Scaling”成为具身智能下半场的新竞争逻辑,原力灵机通过合并Atomix,一手握模型,一手握场景,率先完成了从理念到实践的闭环,让每一次抓取、每一次搬运都成为智能进化的养料,构建起最深、最宽的护城河。
原力灵机此次合并未必会成为行业唯一答案,,但它揭示了一个更深层的转向:在具身智能领域,模型能力的上限,最终是由真实场景中数据飞轮的转动速度决定的。
当模型与场景被放入同一个增长循环,一个新的行业门槛已然升起——而最先抵达的,将有机会定义下一个时代。
