









机器人前瞻(公众号:robot_pro)
作者 | 江宇
编辑 | 漠影
具身智能的产业角逐,本质是具身大脑的技术突围。作为大规模落地的核心瓶颈,“大脑” 能力直接决定技术能否从实验室走向产线。
2026年上半年,国内具身智能领域融资额已超400亿元,其中超过一半的热钱涌入了“具身大脑”派。
放眼全球,从美国的Physical Intelligence、Skild AI,到国内雨后春笋般涌现的具身大脑创业公司,产业与资本正在用真金白银押注一个判断:谁能率先做出可量产、可泛化、可低成本部署的具身智能系统,谁就更接近产业落地的关键入口。
但行业普遍忽略了一个关键事实:单靠“大脑”无法直接进入工厂。适配量产产线的具身智能,必须实现大脑、机器人本体、工业数据和场景工具链的全域协同。
国内具身智能公司鹿明机器人选择的,正是这条以真实工业痛点为核心、以全栈能力支撑规模化落地的「产业具身」路线。
外界对鹿明的关注,可能来自不同侧面:UMI数据采集、产业合作、机器人本体以及具身大脑等单一维度;但在鹿明自身的技术体系中,这些能力始终指向同一目标:围绕真实生产痛点,打通数据、模型、本体、场景工具链,构建可直接进入产业现场的具身智能基础设施。
此次,鹿明机器人Lumos旗下旗舰级产业具身大脑Prime R0登顶MolmoSpaces,正是这条路径的一次关键验证与权威答卷。
正如鹿明机器人创始人兼CEO喻超所说:“回归产业本质,让具身智能真干活,产生真价值。”围绕这一判断,鹿明正在通过Lumos NexCore全域产业具身大体系,推动具身智能从科研验证走向产业落地。
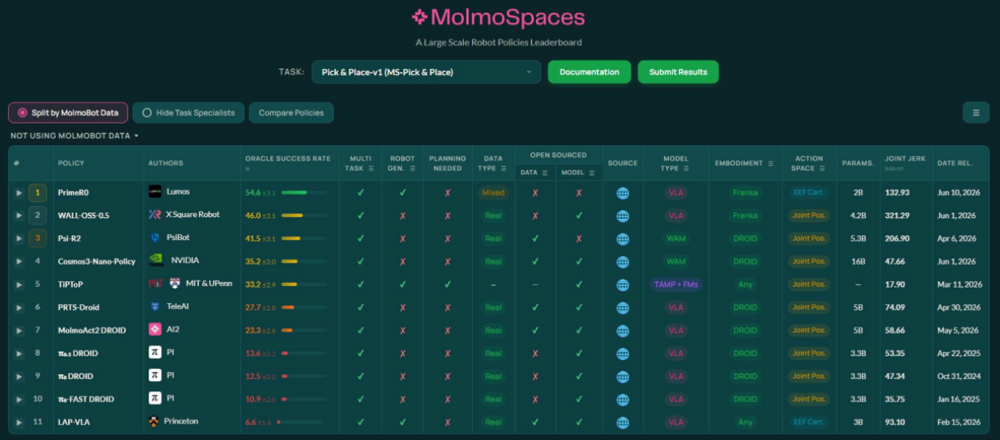
一、零样本实测登顶,Prime R0拿下全球第一
在MolmoSpaces最新榜单中,鹿明机器人产业具身大脑Prime R0,登顶全球权威零样本评测基准MolmoSpaces,拿下单臂精细操作、双臂协同操作全任务谱系综合成功率全球第一。
MolmoSpaces由美国艾伦人工智能研究院AI2发起,是全球具身智能领域具有较高公信力的零样本评测基准。同场参与评测的阵容不容小觑,包括NVIDIA、MIT、普林斯顿大学等全球头部力量。
这份榜单的含金量,首先来自评测机制本身。
MolmoSpaces禁止模型在DROID平台评测集上进行微调或领域自适应,要求所有模型以零样本方式直接响应自然语言指令。同时,场景布局、机器人初始位姿、物体空间分布、相机参数等条件均被固定,并以平均成功率作为排名指标。
在此次评测中,Prime R0需要面对约100个不同环境,覆盖室内、室外场景。抓取对象既包括杯子、盒子等常规物体,也包括水果、勺子、叉子、刀具等不同形态物体,同时考验视觉识别、夹取稳定性和动作泛化能力。
▲搭载Lumos Touch机械臂+Prime R0:长时序自主流程规划,具备动态误差自校正能力,实现柔性织物自主规整
对鹿明而言,Prime R0拿下全球第一,意义不只在于榜单成绩。MolmoSpaces提供了一套统一、可复现的零样本评测环境,Prime R0在其中的表现,验证了鹿明产业具身路线下模型能力的基本盘,也让其“产业具身”路线有了更清晰的技术坐标。
二、从实验室走向产线,产业具身要先解决真实成本账
机器人能不能落地,最终要回到工厂里的三笔账:算力账、节拍账和场景泛化账。
当前,不少开源或大参数世界模型更适合实验室展示。一旦真正放到量产产线中,问题很快会暴露出来:算力成本高、响应速度慢、泛化适配弱。
对制造业客户来说,模型参数有多大并不是最关键的问题,能否稳定完成任务、部署成本是否可控、换场景后的调试成本是否可接受,才是决定技术能否进厂的核心。
这也是Prime R0与单纯“打榜模型”的不同之处。它是从真实工业生产痛点中长出来的模型能力。
▲搭载Lumos Touch机械臂+Prime R0:依托少样本泛化能力,仅80组标注样本即可完成杂乱物料密闭空间规整作业
先看算力账。行业主流大模型往往依赖A800等高端显卡部署,硬件门槛较高。Prime R0总参数约2.8B,可在消费级5060 8G显卡上稳定运行,更适合工厂边缘本地部署,降低了对云端大算力集群的依赖。
再看节拍账。大参数量WAM模型单步推理可能达到5至6秒,难以适配流水线节拍。Prime R0强调毫秒级控制频率,面向连续作业,减少对产线节奏的拖累。
最后是场景泛化账。工厂场景中,工件偏移、遮挡、堆叠、SKU变化、机械臂切换都很常见。传统方案往往需要重新训练或人工示教,而Prime R0强调对无序抓取、物料分拣、精密装配、双臂协同等任务的多任务适配能力。
鹿明的产业具身路线,也已经在融资和产业合作中得到验证。
此前,鹿明机器人连续完成A1及A2两轮融资,累计融资近10亿元。其中,A1轮由三菱电机领投,老股东普华资本、吴中金控等超额跟投;A2轮由三菱电机继续领投,恒生电子、海高集团、昆石投资等产业方跟投。
在产业合作上,鹿明与三菱电机的合作是代表案例。双方在柔性质检场景共创的具身智能解决方案,已在三菱电机中国工厂投入试用。
三菱电机还定义了质检、装配、分拣、搬运四大工业场景,并向鹿明开放场景合作。鹿明机器人从质检场景方案开始,推动机器人在上述工业场景陆续落地。

除三菱电机外,鹿明还与中远海运、德马科技、广运集团等产业方展开深度合作。这些合作说明,鹿明的“产业具身”正在进入真实产业现场。
三、从工业操作到通用场景,Prime R0补上物理预判这一环
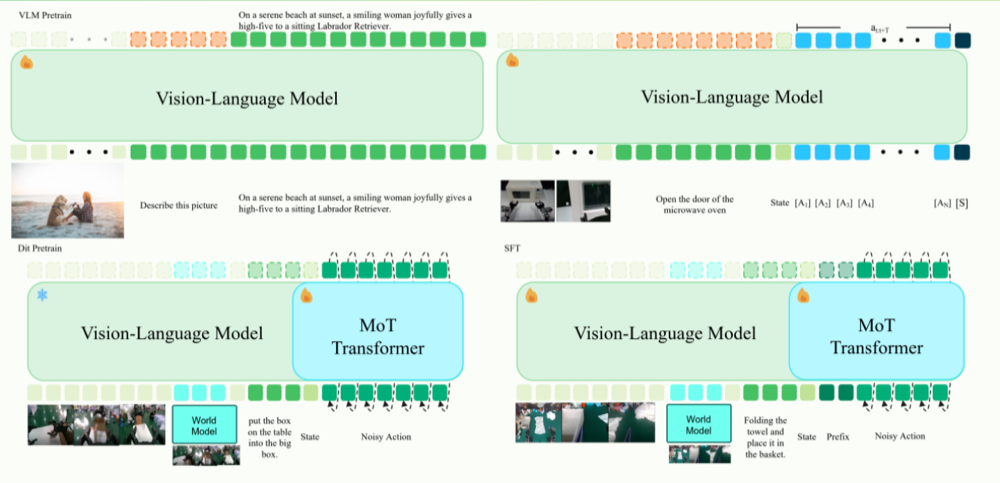
行业内两条主流技术路线都存在短板。纯VLA视觉语言动作模型更擅长理解指令和映射基础动作,但对物理运动趋势、长时序连续作业的稳定性支持不足;传统世界模型能够推演物理状态变化,但对自然语言意图的理解不够深。
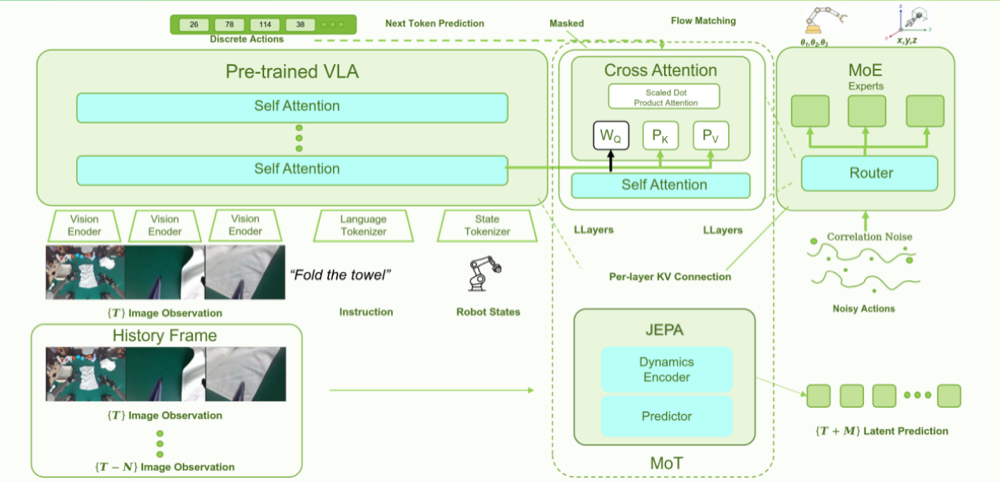
Prime R0的技术思路,是把世界模型的动态演化预判能力嵌入VLA语义决策框架,让模型在每一次实时动作决策中,自主生成物理行为后置演化趋势预判,实现“语义理解+行为执行+态势预判” 三位一体全域决策闭环。
依托时序自适应动作生成、统一几何动作表征、轻量化隐式物理预判、MoE专家网络四大自研核心模块,Prime R0从根本上突破了“感知驱动动作”的旧范式。
这听起来很技术,但落到工业现场,问题其实很具体。
机器人在工厂里抓取物料时,物体可能会偏移、遮挡、堆叠;在双臂协同任务中,两只机械臂需要配合空间轨迹;在柔性物体规整中,布料、线缆等对象还会发生形变。这些任务都要求模型不能只看懂当前画面,还要判断动作执行后,物体和环境会如何变化。
Prime R0要补上的,正是这部分物理预判能力。
更重要的是,鹿明并不把工业场景视为能力边界。工业操作中的抓拿放、工具使用、物料整理、双臂协同,本质上也是商业服务、家庭服务和通用人形机器人需要掌握的基础操作能力。
在喻超看来,“工业场景的许多问题,从最简单的抓拿放,到更为复杂的工具使用,后续一定可以向商业服务、家庭等更广阔的场景迁移。”
四、从单一模型到NexCore体系,瞄准产业具身底座
产业具身的长期竞争,最终要落到体系能力上。
从鹿明目前的布局看,这套闭环已经逐渐成型。鹿明以Lumos NexCore全域产业具身大体系构建核心壁垒,形成全栈闭环能力。
在本体层面,鹿明拥有多构型机器人快速搭建和规模化量产能力。
在数据层面,鹿明率先布局数据基建,通过“无本体数采”技术,形成“数据-模型”的高效飞轮,提升模型泛化能力、加速算法快速迭代,让机器人快速习得工业级的通用技能,其希望通过“无本体数采”技术,绕过传统依赖物理本体采集数据的低效模式。
在模型层面,鹿明Prime R0围绕算力成本、产线实时性、设备任务兼容性、量产稳定性多个工业核心痛点设计,全方位匹配真实产线生产需求,打造低算力成本、可实现毫秒级响应、可柔性适配多任务、多本体、能真正提升产线综合效率的产业具身大脑。
正如喻超所言:“Lumos NexCore是一套面向产业具身的操作系统。Prime R0是它的第一个旗舰大脑,未来会持续迭代出更多模型,覆盖制造、物流等全场景,最终成为中国乃至全球工业机器人的标配底座。”

结语:产业才是具身的真正考场
Prime R0登顶MolmoSpaces榜单,给鹿明机器人带来了一次国际权威基准背书,也让“产业具身”从战略路线落地为可验证、可量化、可落地的硬核能力——它印证了鹿明在轻量化部署、实时响应、跨任务泛化与物理世界预判上的技术闭环,真正打通了具身大脑从实验室到工业现场的关键壁垒。
随着Lumos NexCore体系和Prime R0持续迭代,鹿明不断下沉至产业最深处,让具身智能深度扎根制造现场、解决真实痛点。
未来,产业具身能否成为制造业智能化升级的新基础设施,还要接受更多真实场景的检验。但至少这一次,Prime R0已经用一张全球榜单,先交出了一份有分量的答卷。
