







机器人前瞻(公众号:robot_pro)
作者 | 钟宸
编辑 | 漠影
机器人前瞻6月26日消息,Apptronik在其官方网站上正式推出新品Apollo 2,这也是该产品首次出现在公众视野。
Apptronik脱胎于德克萨斯大学奥斯汀分校人本机器人实验室(Human Centered Robotics Lab),2016年从高校分拆独立。企业早期主攻政府太空机器人研发,团队深度参与过NASA Valkyrie人形机器人项目;2022年起拿到外部融资后,该机器人公司的重点更多转向商业应用,现已与 Google DeepMind、Gemini Robotics达成合作。
除全新Apollo 2之外,Apptronik产品线已有15款产品,包括Apollo 1、QDH/B/A、Astra、Draco II/III等机型,覆盖外骨骼、人形、双足机器人多条技术路线。

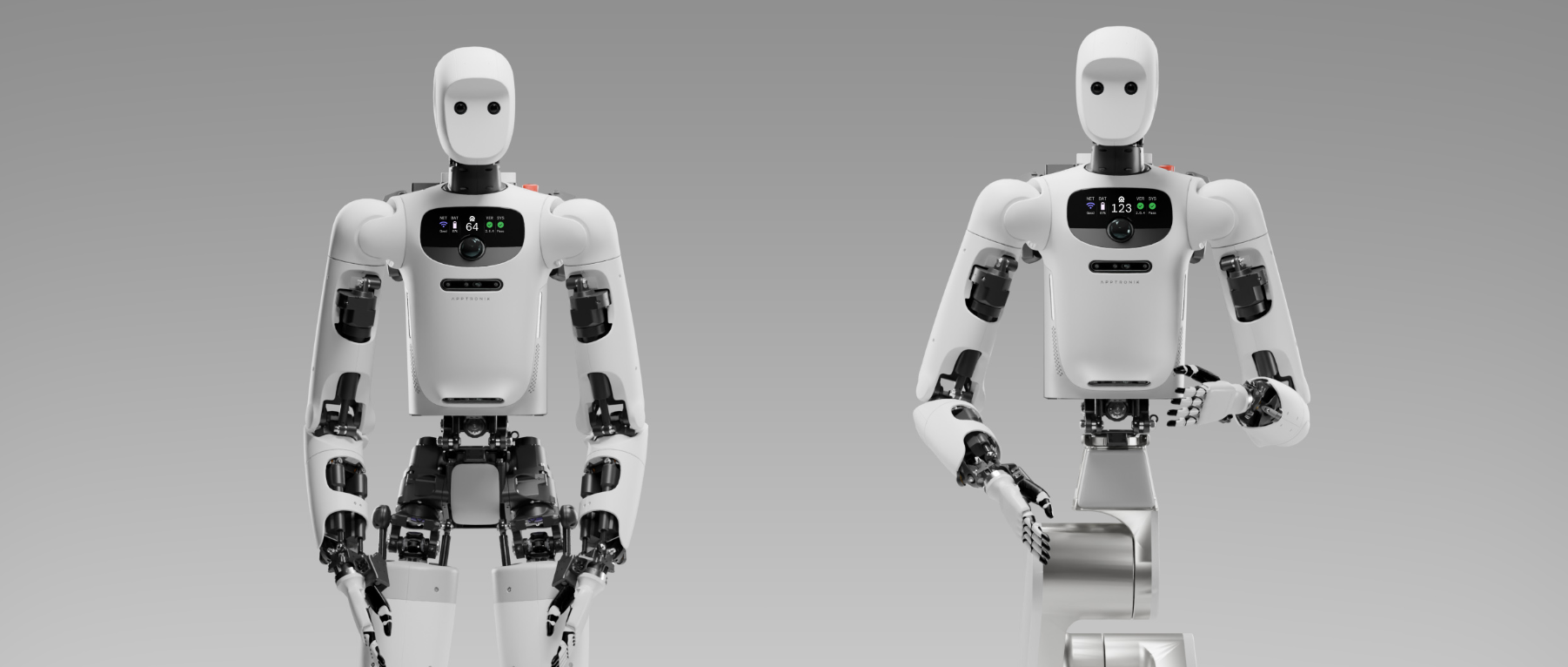
▲Apollo 2(图源:Apptronik官网)
据官方介绍,Apollo 2采用模块化架构,可根据作业需求更换移动底盘。双足形态适配人类日常活动空间,配套轮式底座则能在高负荷作业场景下兼顾稳定与作业效率,两种形态组合让Apollo 2成为通用型工业作业平台。
该公司CEO在此前采访中提到,贴近人类的外形设计,能大幅降低机器人适配生产与生活各类场景的门槛。
这一产品也延续了Apptronik以人为中心的设计思路,搭载LED交互嘴、语音收音与发声模块,胸前显示屏可实时展示设备运行状态。硬件层面,Apollo 2搭载自研专利驱动模组,驱动器综合能效超90%。
Apollo 2还具有碰撞检测功能,一旦有物体闯入预设作业路径,机器人会立刻停机避险。同时平台支持自定义作业边界,企业可根据人员、设备、障碍物的分布,灵活调整机器人运行逻辑。
该机器人机身搭载可快速拆卸电池,通过换电即可实现全天候连续作业;同时支持短时补电、有线充电两种方案,适配多样化作业场景与部署条件。
本次同步推出的还有整套Apollo人形机器人开发平台。该平台以Apollo 2硬件为载体,依托自研Artemis Artemis(阿尔忒弥斯系统)完成环境感知、路径规划、运动控制、安全防护、任务调度与人机交互功能;配套Fleet Connect集群管理系统,则提供设备状态监测、任务调度、批量部署、数据采集等工具,助力企业统一管理机器人集群,提升整体运营效率。

▲Apollo 2(图源:Apptronik 官网)
据福布斯新闻,2026年2月,Apptronik完成新一轮5.2亿美元的融资,加上此前4.15亿美元的A轮融资,该公司A轮融资规模已达9.35亿美元。募集资金将用于扩大Apptronik人形机器人Apollo的产能。
在此轮融资后的4月28日,Apptronik还宣布了一系列高层管理人员的任命:
Daniel Chu就任该公司CPO,此前在Waymo公司期间同样担任CPO一职,且参与了全球首个全无人自动驾驶打车服务的推出;
Kevin Garell担任全球服务与支持高级副总裁。他曾任职于波士顿动力,统筹全球售后体系搭建,擅长规模化落地机器人配套服务基建,也是推动波士顿动力从研发导向转向商业化运营的关键人物。
Dave Perry出任市场副总裁,曾任职于亚马逊、Paramount+,拥有成熟的全球化知名品牌的打造经验。
Apptronik表示,此番高管团队的任命,表明其正在发力面向大众市场的商业化落地。
