








机器人前瞻(公众号:robot_pro)
作者 | 周加琦
编辑 | 漠影
机器人前瞻6月29日报道,近日,纬钛机器人宣布完成Pre-A轮融资,由红鸟启航基金领投,领屹投资、永鑫方舟、韦豪创芯、宁波吉德等产业投资方及上海天使会联合参投,多家老股东继续加持,投中资本担任本轮融资独家财务顾问。
据悉,本轮融资,纬钛机器人将用于视触觉感知技术迭代、执行器落地、视触觉数采和模型闭环、研发团队扩充,以及拓展海外市场。
视触觉融合是具身智能感知层的瓶颈之一,纬钛机器人本轮融资结构以产业方为主,说明技术路线在供应链端获得认可。
据公开信息显示,纬钛机器人成立于2024年1月,注册资本约102万元。在过去的一年中,该公司已完成连续完成三轮融资,累计融资数亿元。
天使轮由小米战投领投,宽桥恒松、雅瑞资本、梅花创投、微光创投、iCANX Fund等跟投;天使+轮由顶级美元VC祥峰投资领投,雅瑞资本、梅花创投、微光创投、iCANX Fund等多家老股东参投;Pre-A轮投资方阵容则由多家产业方组成。
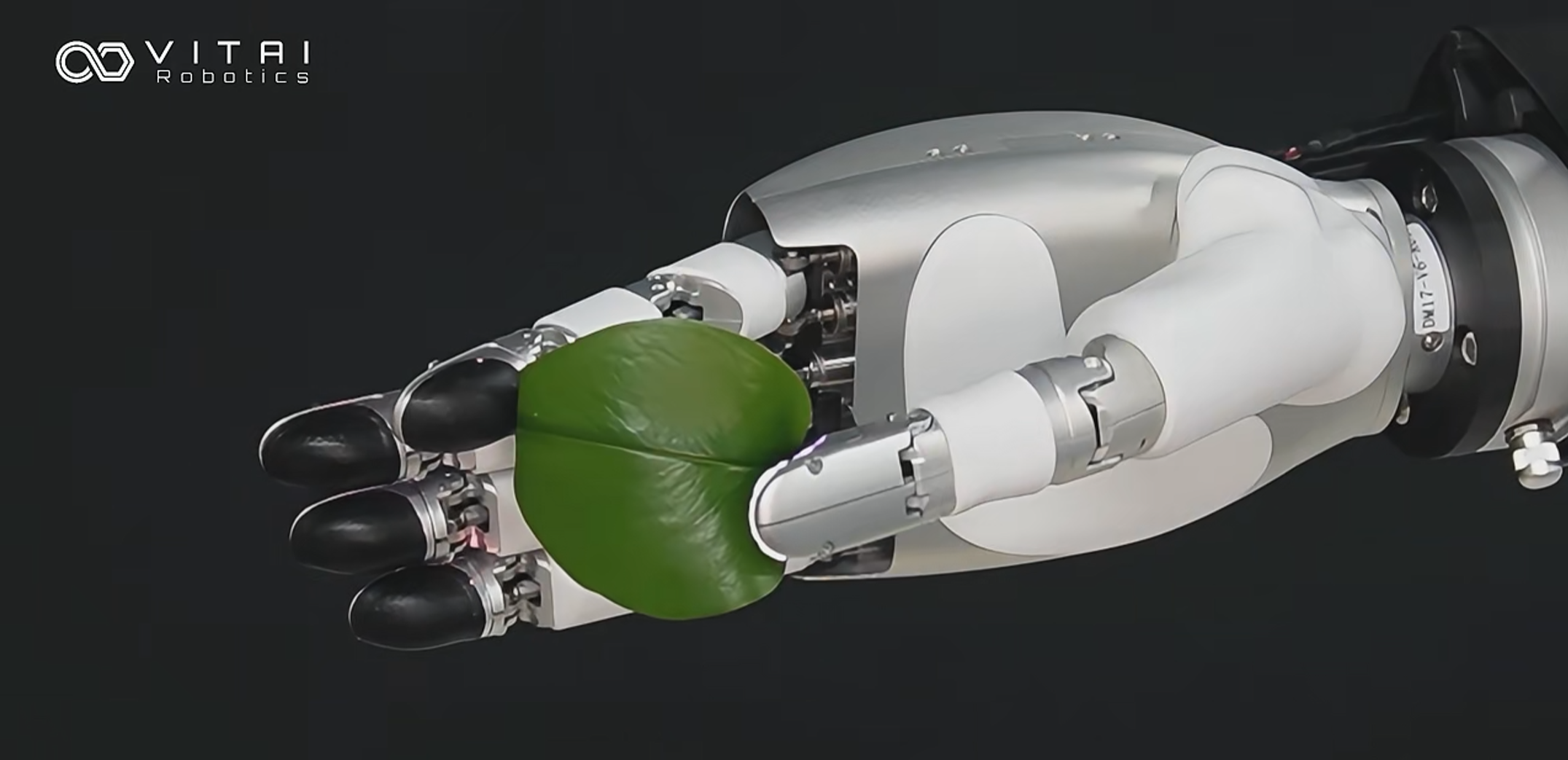
自成立以来,纬钛机器人专注于打造“心灵手巧”的类人智能机器人,通过将视触觉感知技术嵌入灵巧手末端,让机器人在高自由度基础上,拥有类人的“指尖手感”,从而实现从“能抓取”到“能精细操作”的跨越。
目前,纬钛机器人已发布五款产品,分别为视触觉传感器GF225、GF220、GF515,视触觉夹爪VT-GRIPPER90与视触觉UMI VT-UMI85,分别对应三个层面,即视触觉感知、执行器落地、视触觉数采与模型闭环。
在视触觉感知层,三款产品提供了面向不同末端形态的触觉方案。其中GF515可在极其有限的指尖空间内,同时实现高分辨率触觉成像、高频率感知和多维力信息的获取。
▲ 视触觉传感器GF225(图源:纬钛机器人)
GF515最大法向力和切向力为20N,最小识别力为0.01N,采样频率最高达120Hz,实现毫秒级实时反馈。
在执行器落地层,VT-GRIPPER90视触觉夹爪最大夹持力25N,最小识别力为0.01N,最大抓取速度为100mm/s,在极速模式下可达400mm/s。
该产品将传感器和执行器深度融合,集成手眼协同算法和力控策略,面向柔性抓取、精密插拔、易碎物体操作等制造业需求。

▲ 视触觉夹爪VT-GRIPPER90(图源:纬钛机器人)
在数采与模型层,VT-UMI85整机重约500g,空间定位精度约1mm,最大夹持力为2kg。
该产品视触觉数据采集系统解决了当前具身智能领域一个长期存在的痛点:机器人训练数据严重依赖视觉,而接触、压力、滑动、摩擦、形变等多维物理信息几乎空白。

▲ 视触觉UMI VT-UMI85(图源:纬钛机器人)
此外,纬钛机器人在今年1月发布了全球首个最大规模跨本体视触觉多模态数据集“白虎-VTouch”,正是“数采与模型层面”能力的集中体现。该数据集总规模超过60000分钟,包含超9000万对真实的物体接触样本,覆盖家居家政、工业制造、餐饮服务、特种作业四大类真实场景。

▲ 白虎-VTouch数据集(图源:纬钛机器人)
目前,纬钛机器人已完成产品商业化落地验证,覆盖三类客户群:
一是以小米为代表的工业场景客户,在真实产线上进行精细化操作的落地应用。
二是具身智能机器人公司,采购两指和五指视触觉传感器用于夹爪和灵巧手的研发与集成。
三是科研机构和模型团队,采购视触觉数采设备进行技术研究和训练。
现阶段该公司已与3C、汽车、家电、新能源等的头部企业达成合作,落地场景覆盖精准放置与装配、无序自适应抓取、柔性物体操作等。
纬钛机器人创始人兼CEO李瑞,是美国麻省理工学院(MIT)电子工程与计算机科学博士,长期致力于机器人与计算机视觉研究,在MIT读博期间师从美国两院院士Edward Adelson教授,共同开创并引领了视触觉研究路线,研发出全球首款分辨率超越人类手指的视触觉传感器。
▲ 纬钛机器人创始人 李瑞(图源:纬钛机器人)
从传感器、夹爪到数据集,纬钛机器人打通了“感知-执行-数据”的技术闭环,产品已在3C、汽车等产线进入落地验证阶段,推动机器人从“能抓取”向“能精细操作”迭代升级。未来,这一路线的产业化进展,将影响具身智能在复杂场景下的实用化进程。
