








机器人前瞻(公众号:robot_pro)
作者 | 周加琦
编辑 | 漠影
机器人前瞻7月1日报道,近日,忆生科技宣布完成数亿元天使轮融资,本轮投资方阵容横跨产业资本与国资平台,包括正大旗下中生制药、浦东创投、张江高科、弘信电子、云晖资本、沃肯资本、金舵资本等。
据悉,忆生科技本轮融资资金将主要用于可解释具身控制大模型与物理世界模型的研发、多模态全人形动作交互数据和算法训练管线的建设、顶尖人才团队的扩充,以及深圳前海和上海张江研发中心与产业化基地的建设,加速推动可自我纠错、持续进化的具身智能大脑与小脑系统走向商业化应用。
忆生科技成立于2023年9月,专注于打造具备“感知-预测-交互”完整闭环的自主智能系统,构建了“大脑+小脑”的统一架构,赋予机器人自主智能闭环能力:
大脑的“视觉记忆”:模仿人眼,获取并理解外部环境的物理模型(空间与几何关系),进行复杂推理。
小脑的“肌肉记忆”:模仿人手,通过运动控制获取并改善本体模型,生成高频、稳定的运动控制策略。
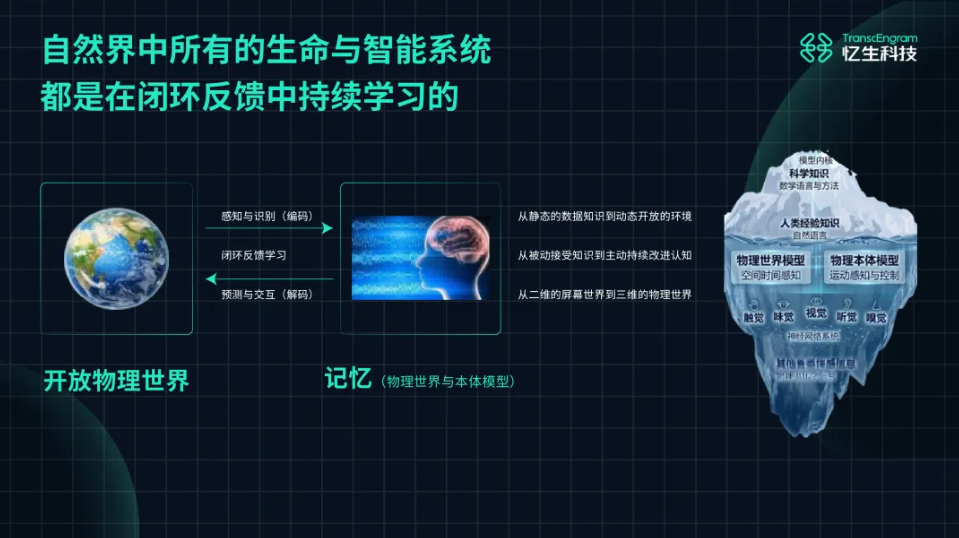
▲闭环反馈图(图源:忆生科技)
此外,忆生科技还搭建了覆盖全链路的四大产品矩阵:
EngramTeleOp智能真机遥操数据采集系统:该系统采用先进的“生成式小脑”规律映射,延迟控制在10ms以内,保证采集数据干净平滑。操作员只需5分钟部署,即可上手教机器人,支持一人驾驭多种结构不同的本体,同时支持千公里公网超低延迟遥操。
EngramEgo执行者视角运动数据采集系统:该系统基于执行者第一视角,通过低成本轻量化穿戴设备,在真实场景中高效获取包含重心转移、躯干借力等隐性常识的高质量全人形姿态数据。
EngramControl智能运动记忆控制系统:该系统将采集和演示数据提炼为可复用的“动作规律记忆”,减少重复编程,让机器人具备“观察一遍即可学会”的零样本泛化潜力。
EngramNav环境记忆与导航系统:该系统赋予机器人记住环境物体、位置与空间布局的能力,支持大尺度非结构化越障与精准空间移动。
忆生科技同步重点推进两大应用路径,分别为高端酒店服务场景与高端制造柔性装配场景。
忆生科技创始人马毅,获得加州大学伯克利分校电子工程与计算机科学硕士、博士学位,以及数学硕士学位,现任香港大学计算与数据科学学院创始院长及计算机系系主任,人工智能讲席教授。
马毅在学术界曾先后在美国伊利诺伊大学香槟分校及加州大学伯克利分校担任教授职务,在产业界曾担任微软亚洲研究院视觉计算组主任、字节跳动硅谷研究院院长及猎豹移动独立董事等职务。

▲忆生科技创始人 马毅(图源:忆生科技)
忆生科技联合创始人高盛华,于2012年获得新加坡南洋理工大学博士学位,现任香港大学终身教授。迄今为止,高盛华在计算机视觉和人工智能领域顶级会议和期刊发表论文120余篇,总引用次数20000余次,H-index 60。
忆生科技联合创始人杨言超,于2019年获得UCLA计算机科学博士学位,现任香港大学电子工程和数据科学院助理教授。杨言超的研究方向包括机器视觉、统计学习、人机交互和具身智能。
忆生科技称,现有的记忆系统已在真实场景中完成验证,基于记忆的生成式小脑架构,其多任务综合成功率达到现有 VLA 模型的 3 倍以上,且单个模型执行多任务时,成功率可达 95%。
目前,忆生科技已在上海、深圳、北京、四川布局研发与数据中心,与智元、傅利叶、银河通用等头部机器人企业完成适配合作,并且正与头部制造型企业如飞机零部件制造商开展合作。
