








智东西(公众号:zhidxcom)
文 | 四月
导语:在今年的创投圈,“VR/AR”、“智能交通”成为近似摇钱树的标签,人才抢夺战暗渡陈仓。基于这样的背景,很难想象会有一支创业团队:从Magic Leap辞职的SLAM带头人不去做AR,从百度无人车项目出走的首席工程师没有选择自动驾驶。
今年三月,刘少山离开百度硅谷研究院,张哲离开Magic Leap,两人毅然抛弃了炙手可热的“本行”,开始属于自己的项目Perceptln——为机器人提供完全基于视觉的SLAM解决方案。相比主流的激光雷达SLAM,Perceptln的单/双目视觉方案在性价比、通用性上更具优势,有望进一步普及机器人视觉系统,推动中低端产品的智能化升级。
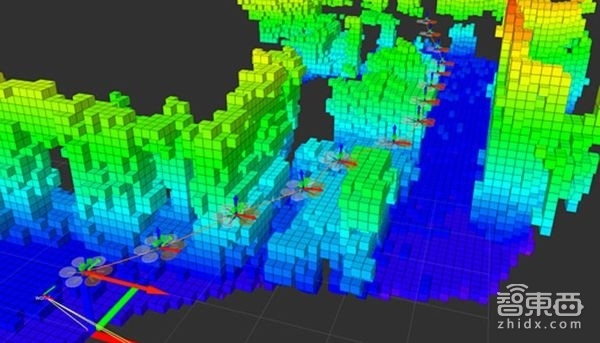
SLAM技术,通俗来说,指为移动设备提供即时定位和空间关系等信息,通常还包括地图构建和路径规划。
最早了解到少山老师是在二月份一篇关于开源项目Alluxio的报道上,当时他的身份还是百度首席工程师,此前曾在LinkedIn、 微软、 Intel、Broadcom工作。
在过去的九个月里,刘少山完成了从供职向创业的转身,经历质疑和踌躇然后坦然,权衡诱惑后走向平静,他为我们梳理出关于Perceptln的创业逻辑和背后故事。这同时也是人工智能时代早期,众多华人硅谷系创业者中的一幅清晰缩影。
一、创业头两个月:没有钱 没有HR

刘少山与张哲相识于2009年,两人曾在微软总部共事,参与过微软机器人、WindowsPhone等项目。2016年3月,两人先后从当下最红的AR创业项目Magic Leap、百度硅谷研究院辞职创业。
确定机器视觉领域后,两人将目标方向植入进公司名称Perceptln(中文译名:普思英察),即Perception + Insight / lntelligence”(感知+洞察/智能),提供室内定位、深度学习、路径规划等软硬件整合式的解决方案,为移动式机器人类产品提供一双“慧眼”。
美国求学,硅谷工作,刘少山经历了从芯片时代到PC普及以及互联网、O2O、移动社交等科技浪潮的重要变迁。“技术迭代很快,移动互联网的窗口期不会太长,错过这个节点再进入机会就不多了”,基于人工智能技术第三次高潮的迭起,刘少山和张哲决定把握住这次机会。
在创业的细分方向选取上,两人结合兴趣和擅长领域两方面的因素。张哲毕业于纽约州立大学机器人方向博士,研究方向涉及地图重建、位置跟踪、机器人自主避障导航等,2014-2016年初在Magic Leap工作从事SLAM相关的工作。现主要负责解决方案的核心算法。
刘少山是加州大学欧文分校计算机博士,研究方向包括智能感知计算、系统软件、体系结构,在百度硅谷研发院担任首席工程师,从事无人车项目的操作系统和硬件交互研发。现主要负责系统架构和整合。
随着位于安创孵化器的深圳分公司落地,刘少山表示将会把更多的精力放在国内。创业之后,他已经将家人迁往之深圳。
此前,两人长期身处并习惯于学院/大公司按部就班式的节奏;独立创业后,两人的心态和工作状态面临着双重冲击。“头两个月,公司没有钱,甚至连个HR都没有”,刘少山回忆。
事必躬亲,是每个创业者在早期必然经历的繁忙状态。不断质疑与反问创业初衷后,刘少山顿悟,“总结起来就是一个节奏的问题,一旦适应快节奏、多线式问题解决的生活后,自信心也就足了”。
人才向来是技术型公司的核心发展竞争力,将研发中心设在硅谷能够很好地利用当地优势。“无论是面向的产品,还是人才储备上,美国仍属于前沿”,刘少山表示。在团队扩张的速度上,Perceptln节奏相对稳健。现团队近二十人,硅谷团队主要负责核心技术研发,深圳团队负责技术产品落地和供应链协调。
据智东西独家获悉,Perceptln正在跟进新一轮A轮融资,融资规模在三千万人民币以上,有望于年底完成。
二、深圳考察:机器人市场存量比想象中大

虽说有厚实技术护航,但缺乏可靠与缜密的商业逻辑对于创业公司仍十分危险。
基于国内实际调查数据显示,服务型机器人行业尚属一个叫好不叫座的领域,除扫地机器人偏家电外,一家6万台的年出货量已算得上乐观数字。如果是基于如此有限的市场存量,B端类的解决方案商的机会将十分有限。
对此,刘少山带来了不一样的视角。“在立项初期,我们也找来了多家咨询公司的报告比对,对于家庭类机器人市场的预期总体呈上升趋势,到2020年全球预计将达到2000万台的出货量”。
“并且,实体市场远比一些统计数据来得大”,这是刘少山在深入走访过深圳硬件之都后的感受。他表示,中国厂商的海外出口量是一个被忽视的统计空白;此外,在中国很多南方城市存在着一批“闷声发大财”的硬件企业,“他们不需要to VC,也不需要媒体曝光,在默默无闻地保持着高效运转”。
当然,更为重要的是,“他们对于高性价比的技术类方案的渴求十分强烈”,刘少山说道。
一些非传统意义上的机器人产品也需要视觉解决方案。“比如说行车记录仪,它自身未必动起来,但在倒车和导航等场景中对于建模和时空信息捕捉却十分有必要”。刘少山还介绍道,一家应用于农业场景的摘苹果机器人是Perceptln的海外客户之一,“在美国,人力成本很高,农业机器人的市场规模就达到了50亿美金/年”,刘少山分析道。在刘少山眼中,Perceptln面向的是一个更具潜市场。
三、投资人找上门:“只要做无人车,我就投你”

在今年的创投圈,“VR/AR”、“智能交通”成为近似摇钱树的标签,人才抢夺战暗渡陈仓。基于这样的背景,很难想象会有一支创业团队:从Magic Leap辞职的SLAM技术带头人不去做AR,从百度无人车项目出走的首席工程师没有选择自动驾驶。
在刘少山看来,资本对于人工智能技术的追逐已近似乎疯狂。据他回忆,创业期间曾有硅谷投资人主动表示,只要他做无人车项目就会投钱。“到了这个阶段,是不是真风口也要权衡”。
基于理科生的客观与求真思维习惯,Perceptln在进行技术分析和方向抉择时更为冷静:
1)VR/AR本身相对空洞,实际上并没有达到预期的体量,市场仍需培育。“但并不代表团队完全放弃了该块市场”,基于手机的AR/VR游戏是Perceptln正在并行的产品线;
2)无人车涉及到数十甚至上百项技术的整合,初创型公司深入该领域的希望和空间实际很小。
诞生于思想更激进、创投氛围更加浓厚的硅谷,Perceptln的作派却显得有些“保守”。在外人看来,Perceptln选择的视觉SLAM方案或许并不如AR、智能汽车的噱头足;但却是在当下更为适合和更加可行的一条路径。
在产品进度方面,刘少山表示,2016年团队专攻在市场研发和产品定位方面;明年上半年将会有软硬件产品相继落地, 包括一款在中、美同步上线的AR/VR游戏,基于双目视觉SLAM方案的开发者套件,以及合作的终端产品。
四、落地产品:三类集成方案 目标是标准化

具体而言,Perceptln基于核心算法与整合优势,提供了三类方案产品。据刘少山介绍:
1)一款纯软件AR/VR游戏,在手机移动端发行。AR领域从硬件切入风险过大,软件游戏具备更多的使用场景和用户群。
2)包含有双目摄像头、智能手机级芯片、传感器集合的SLAM模块,是一款turn-key的方案,供给室内机器人等消费级产品,可实现构建地图、自主导航、路径规划与避障功能。产品的优势体现在高性价比。
3)基于标准化方案的高端定制化,订单量在万台以上,为产品的个性化实现深度定制,产品仍以室内使用为主。
目前,Perceptln的合作对象包括扫地机器人、ADAS厂商等,产品预计明年上半年上市。此外,刘少山提出,团队提供的解决方案中还包括基于单一摄像头+六度陀螺仪的低成本方案,利用有限的传感器采集周边图像,不需要提前扫描,也不需要外部传感器,在算法层面进行整合以处理采集到的大数据,生成周围环境的准确地图和自身定位。
在产品形态上,Perceptln的双目视觉方案类似于Intel已推行数年的Realsense。不过在刘少山看来,二者的市场定位和受众群存在差异,Perceptln的意义在于普及化和低成本化,以及更简单的适配,涵盖了多品牌和定位的移动端芯片。但后者更偏向于基于自家芯片的打包方案。
Perceptln的基本思路是基于核心算法框架,根据实际场景和需求添加数个模块,搭建硬件平台。由于简化了激光雷达、红外等传感器方案,刘少山坦诚在产品精度上作出了一定妥协,“对于消费级机器人产品并不需要达到mm级方案。我们的最大优势是整合,单一的SLAM算法和系统,只有整合起来才能带来更好的产品。”
五、探讨:摄像头取代雷达 折中之举是否可靠?
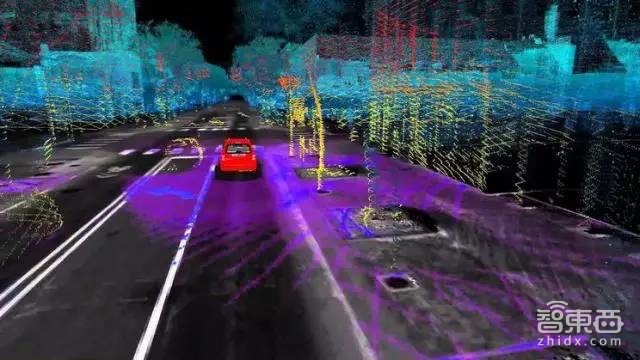
在主流之外的激光雷达方案之外,坚持使用摄像头的意义何在?刘少山表示并不是有意避开雷达。“现行的激光雷达方案在价格和延展性上都十分受限”,他介绍,普通4线雷达均价在1万元左右,并且雷达只能采集到二维信息,避障和地图建模信息维度太少。双目视觉可实现三维全面信息,基于深度学习的识别物体。
不同于实验室或前沿研发,面向消费级产品的技术方案对于可靠性与安全性要求更高。随后,笔者与刘少山针对关于“手机芯片”与“单目摄像头SLAM”两个关键信息点进行了重点探讨。
1)手机芯片是否能够承载大负荷的计算量?
“移动式芯片尚存有很大的发掘潜力,类似于GPU、DSP等都可以利用起来”,刘少山表示。在具体性能层面,Perceptln可以在手机芯片实现速度为5-8公里/小时机器运动的SLAM计算,并针对不同段位的手机芯片提供最适合的算法。
2)单目摄像头的SLAM方案是否可靠?
之所以考虑单目摄像头,刘少山表示,是因为双目在很多移动端设备的良品率过低。据刘少山透露,部分AR眼镜的双目SLAM方案良品率只有20%,其症结在于双目摄像头在安装时对于校准工艺要求过高,并且需要手工介入。
基于手机的单目摄像头+IMU方案主要使用于短距离范围探测。主要原因在于六轴陀螺仪随着时间的延长误差增大,将前后帧率控制在33ms以内可实现厘米级的误差。
此外,刘少山表示,模块方案同时会引入相关修正算法以达到实际场景需求。
七、结语:情怀的延续

在与刘少山的言谈之间,让我恍惚间回到了上世纪90年代初国内互联网兴起带动的一批回国创业浪潮中。在人工智能带来的新世相下,他们果敢、无惧、不远万里地回到祖国实现更大的抱负,与此同时也承担着未知的风险和挑战,其精神和魄力值得称叹。
落实到Perceptln项目上,因其无需提前扫描,无需外部传感器等易用性,且在模块体积和性价比上具有更大的提升空间,有望在室内机器人、AR/VR、智能车载等已经落地的硬件平台上应用和普及,真正实现消费级品类的智能升级。单/双目视觉SLAM方案虽看似偏离了主流式的激光雷达方案,但确是基于市场与B端客户需求的衍生产品,在商业模式和市场空间上站得住脚,不乏创新也更接地气。
谈及对于机器人的萌动,刘少山最早可以追溯到十年前比尔·盖茨的一篇前瞻性文章,在《每个家庭都有一个机器人》(A Robot In Every Home)文章里,比尔·盖茨除了预言每个家庭将拥有电脑之外,还建议我们都应该有一台机器人。
“仙童半导体和英特尔带来了基于芯片的创新,接着微软将PC普及到家庭;然后谷歌通过搜索引擎,将信息网络连接起来;Facebook将人类社会行为搬到了网上,亚马逊、Uber、Airbnb将人类商业行为挪到了网上。总有一天,机器人会把这些事都做了。关于机器人,我们谈论了太久,却迟迟没有出现真正的主流产品,我们希望基于自己的技术,推动这一天的进程。”
这大概就是关于Perceptln的机器人梦。
每日一头条
趋势·深度·犀利·干货,最专业的行业解读
深喉爆料、投稿:guoren@zhidx.com

